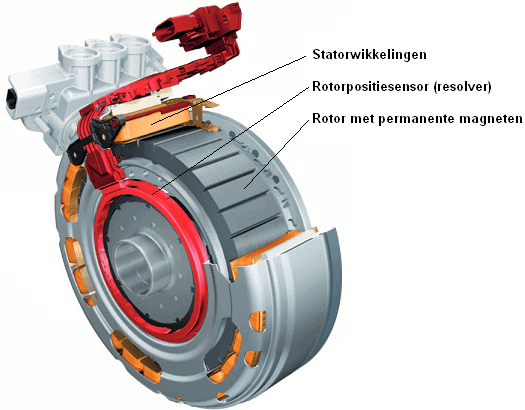
Préface: Pour le fonctionnement du moteur électrique synchrone il est essentiel que le rinçage correct à travers le onduleur sont contrôlés. Pour déterminer quelle bobine (U, V ou W) doit être alimentée, l'ECU de l'onduleur lit la position du rotor, qui est mesurée par le capteur de position du rotor, également appelé « résolveur ».
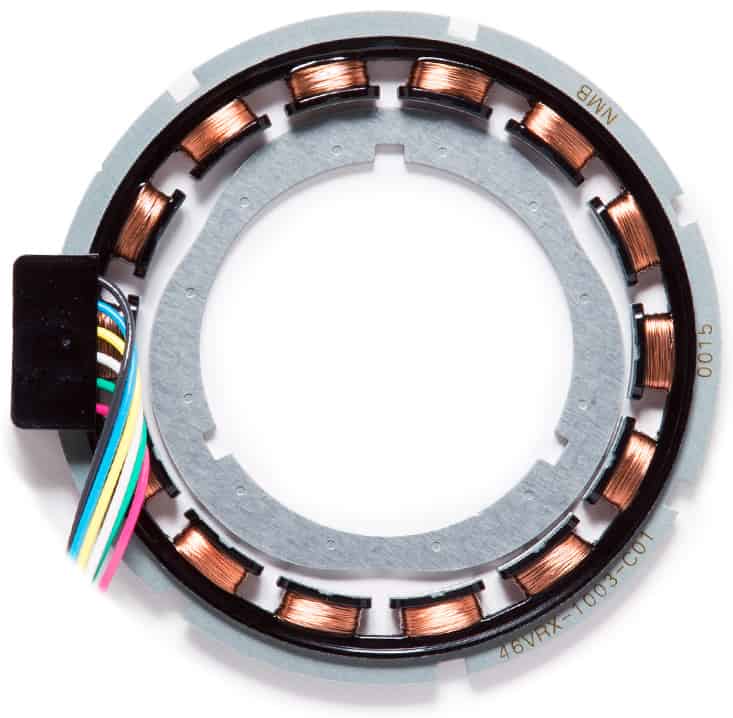
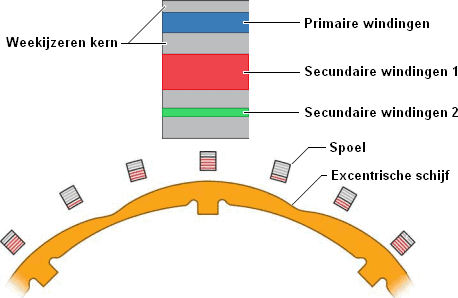
Le résolveur se compose d'un anneau extérieur avec un certain nombre de bobines à l'intérieur d'un plateau excentrique rotatif. La distance entre la plaque excentrique et les bobines change constamment au fur et à mesure de sa rotation.
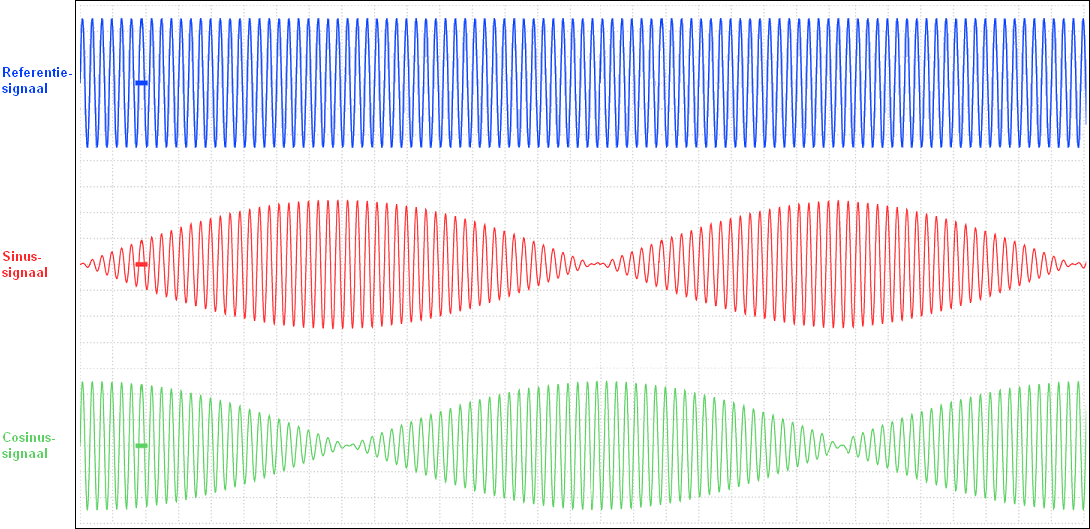
Signaux du résolveur : L'ECU fournit au résolveur un signal de référence. L'entrefer entre une bobine et l'excentrique crée une tension alternative sinusoïdale élevée ou faible. Avec une forte amplitude du signal sinusoïdal rouge ou vert (voir la figure ci-dessous), l'entrefer entre l'excentrique et la bobine est faible.
Le résolveur fonctionne aussi bien à l'arrêt que pendant le fonctionnement du moteur électrique : dans les deux cas, le calculateur doit savoir dans quelle position se trouve le rotor. L'image ci-dessous montre les signaux théoriques. En réalité, la fréquence est beaucoup plus élevée, donc la variation de l’amplitude des signaux sinus et cosinus est clairement visible.
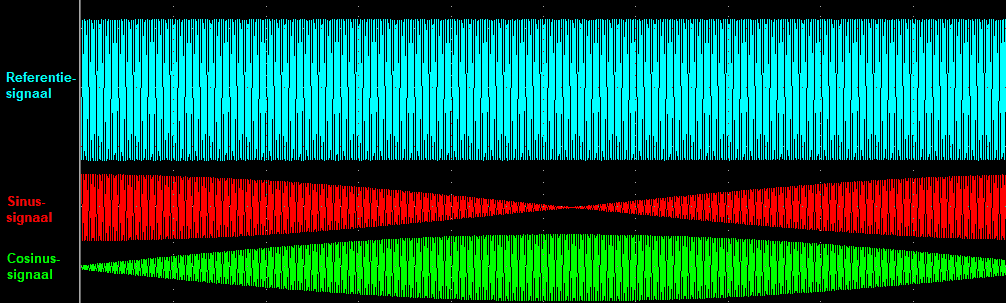
Les deux images ci-dessous montrent une mesure réelle sur un résolveur. Ici aussi, nous voyons le signal de référence en haut, et les signaux sinus et cosinus en dessous. La première image est à l'arrêt : le moteur électrique ne tourne pas. La hauteur du signal sinusoïdal et du signal cosinus reste constante. En fonction du niveau de cette tension alternative, l'ECU sait où se trouve le rotor à l'arrêt.
Signaux du résolveur à l’arrêt
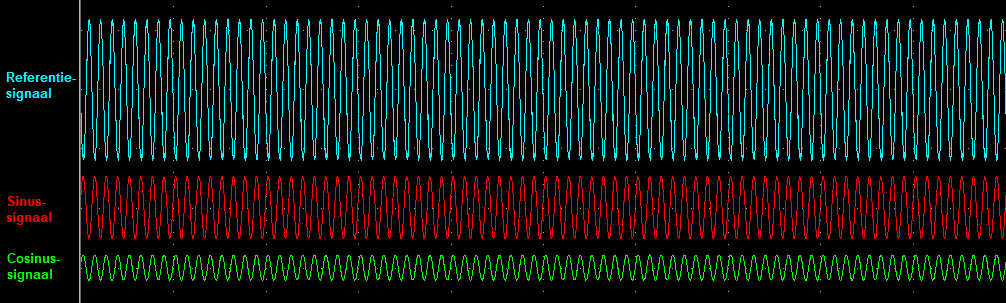
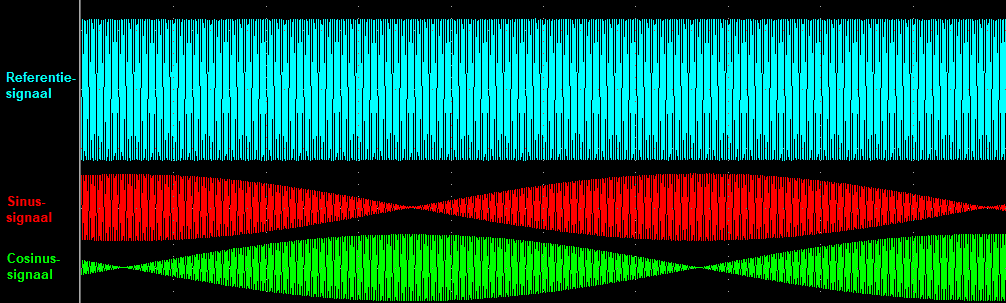
Dans les deux images suivantes, le temps par division a été réduit. La fréquence du signal de référence sur le résolveur est inchangée, mais mesurée sur une période de temps plus longue lors de la mesure. En conséquence, nous voyons les amplitudes des signaux sinus et cosinus changer clairement. La première image a été mesurée à une vitesse de rotor faible et la seconde à une vitesse accrue. À mesure que la vitesse augmente, la fréquence des signaux sinus et cosinus augmente (plus de signaux par unité de temps), mais l'amplitude (le niveau de la tension alternative) reste constante.
Signaux du résolveur : vitesse faible
Signaux du résolveur : vitesse augmentée
Composants du résolveur : Le résolveur de la VW E-Golf contient 30 bobines connectées en série. Chaque bobine du résolveur est constituée d'un noyau en fer doux avec trois enroulements différents : primaire, secondaire 1 et secondaire 2.
La bobine primaire (bleue) est alimentée par une tension alternative haute fréquence.
Le nombre de tours secondaires (1 rouge, 2 verts) est différent sur chaque bobine.
Lorsque la came du plateau excentrique se déplace le long de la bobine, l'inductance des enroulements secondaires est amplifiée. En raison du nombre de tours des enroulements secondaires 1 et 2 dans chaque bobine, cela entraîne également des tensions différentes dans les enroulements secondaires. L'ECU de l'onduleur peut calculer la position du rotor en fonction des tensions des enroulements secondaires 1 et 2.
L'ajustement du résolveur au rotor est très précis : de nombreux fabricants prescrivent que l'ensemble du moteur électrique soit remplacé en cas de problème avec le résolveur. Après avoir (accidentellement) démonté le résolveur ou desserré les boulons à l'extérieur du boîtier du moteur électrique, le résolveur ne peut plus être remonté correctement. Dans ce cas également, de nombreux fabricants prescrivent de remplacer le moteur électrique.
La position exacte du rotor d'un Moteur synchrone doit être connu à l'arrêt et pendant la conduite. Si le capteur est défectueux, le véhicule ne peut plus rouler.
De la moteur asynchrone en revanche, aucune surveillance de la position du rotor n'est nécessaire. Le capteur de position du rotor émet quatre impulsions par tour de rotor. Cette mesure surveille la quantité maximale de glissement entre le champ magnétique tournant entre le stator et le rotor. Le capteur Hall est souvent utilisé comme capteur. Le capteur Hall transmet des impulsions au calculateur lorsque le rotor tourne, mais ne peut pas effectuer de mesure à l'arrêt, contrairement au résolveur du moteur synchrone. Les constructeurs choisissent aussi parfois d'utiliser le résolveur du moteur synchrone comme capteur de position du rotor.