Thèmes:
- Planétaire, support et couronne
- Boîte de vitesses automatique
- Transmissions à engrenages planétaires
- Calculer le rapport de démultiplication de la première vitesse
- Calculer le rapport de démultiplication de la deuxième vitesse
- Calculer le rapport de démultiplication du troisième rapport
Planétaire, support et couronne :
Un système d'engrenages planétaires se compose d'au moins un ensemble d'engrenages, chacun avec un engrenage solaire, un support et une couronne dentée. Des connaissances de base sur le fonctionnement du système d'engrenages planétaires sont donc nécessaires (comme par exemple faire tourner le planétaire, le support avec les satellites et la couronne dentée, voir page boite automatique).
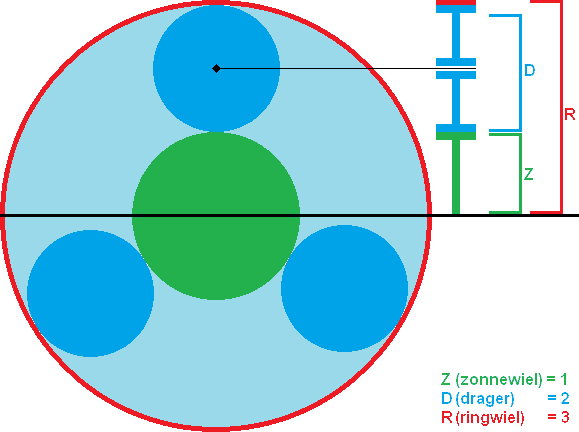
Ci-dessous, une image d'un train d'engrenages où l'engrenage solaire est vert, le support avec les engrenages satellites est bleu et la couronne est rouge. On voit bien que le train d'engrenages est divisé en deux. Le calcul se fait avec des équations, donc peu importe si tout est divisé par deux. Après tout, les proportions restent les mêmes.
Plus loin sur cette page, nous calculerons avec les rapports Z, D et R. En suivant les lignes qui relient les différents systèmes planétaires, le rapport de transmission total de l'engrenage concerné peut être déterminé en utilisant les rapports de tous les Z, D et R. .
Boîte de vitesse automatique:
Une boîte de vitesses automatique classique fonctionne en basculant entre les différents systèmes de trains planétaires, voir le chapitre Boîte de vitesse automatique.
Vous trouverez ci-dessous une représentation schématique de quatre ensembles de systèmes d'engrenages planétaires dans une transmission automatique. Il existe trois systèmes pour les vitesses avant et un pour la marche arrière. La ligne rouge indique la direction des forces à travers la transmission automatique ; de la gauche (côté moteur avec convertisseur de couple) en passant par la partie complète avec systèmes planétaires (lignes noires) jusqu'à l'accouplement de l'arbre d'hélice. Si vous regardez attentivement les systèmes de la boîte de vitesses, vous verrez que l'image ci-dessus en dérive. Quatre systèmes sont utilisés dans la boîte de vitesses, chacun avec un Z, un D et un R (planétaire, support et couronne).

Les systèmes d'engrenages planétaires sont symétriques au-dessus et au-dessous de la ligne médiane. Il n'y a pas d'autre solution, car l'intérieur tourne pendant la conduite. Pour mieux comprendre ce qui se passe lorsqu'un rapport est engagé, les pièces entraînées du système planétaire de l'image ci-dessous ont également été surlignées en rouge :

Dans l'image ci-dessus, le rapport 1 est engagé. Pour engager la vitesse 1, un embrayage doit être engagé. Ce lien est affiché en bleu. Avec l'accouplement fermé et un côté entraîné du système planétaire, une pièce doit également tourner. Dans ce cas, les dimensions des pièces déterminent le rapport de transmission (pensez à un petit engrenage d'entrée et à un grand engrenage de sortie ; le grand engrenage tournera alors plus lentement. Si le grand engrenage avait deux fois plus de dents que le petit engrenage, alors le rapport serait de 1:2).
En principe, cela s'applique également à la transmission automatique ; les dimensions de la couronne dentée, des engrenages solaires et des engrenages satellites sont différentes dans les quatre systèmes. Maintenant, vous pouvez probablement imaginer que lorsqu'un autre embrayage est alimenté (par exemple le système de gauche), la vitesse de l'arbre de sortie a changé.
Plus loin sur cette page, des images, des explications et des calculs expliquent comment les systèmes d'engrenages planétaires de la transmission automatique changent de vitesse pendant la conduite.
Transmissions à engrenages planétaires :
Nous allons maintenant nous intéresser à la moitié supérieure de la boîte de vitesses (car la boîte est symétrique en haut et en bas, voir l'image ci-dessous). A partir de cette image nous déterminerons les transmissions plus loin sur la page. Au-dessus des systèmes, il est indiqué à quel numéro correspond le système ; de 1 à 3 et système R (inverse).
Chaque galaxie a ses propres Z, D et R. Cela n'est pas montré sur l'image, mais si vous regardez à nouveau l'image en haut de cette page, vous la reconnaîtrez. Ceci sera considéré comme connu plus tard sur cette page.
En bas à gauche de l'image vous voyez le couplage « K4 », ce couplage garantit que les deux côtés du système sont connectés simultanément ; le système 3 est connecté aux systèmes 1 et 2. Aucune autre connexion n'a été fermée, donc tout le système est « bloqué ». Le régime moteur est transmis 1 pour 1 aux roues du véhicule, sans rapport de transmission ; Nous appelons cela le prix direct. C'est en quatrième vitesse.
Sur les voitures équipées d'une boîte de vitesses manuelle, le quatrième rapport est souvent également à prise directe. Ici aussi, le régime moteur est transmis 1 pour 1 aux roues.
La différence de vitesse entre l'arbre d'entrée (moteur ou convertisseur de couple) et l'arbre de sortie (véhicule) est appelée rapport de démultiplication.

La première vitesse est engagée.
En sécurisant le support du système I (à l'aide de l'accouplement K1), une force peut être transférée du planétaire au support. Le support est relié au véhicule, il existe donc désormais une connexion directe entre le moteur et la boîte de vitesses. Les dimensions des pièces déterminent un rapport de démultiplication (nous y reviendrons plus tard).
La ligne rouge indique la progression de la force. La ligne verte indique quels autres composants sont en cours d'exécution, car celle-ci est directement connectée à la ligne rouge. Ces pièces tournent, mais comme il n’y a pas d’embrayage sous tension, rien ne leur arrive. Ils tournent simplement au ralenti. La ligne bleue montre ce qui est fixe lorsque le couplage K1 est alimenté. Non seulement le porteur du système 1 est alors fixe, mais également le porteur du système 3 et le planétaire du système R sont bloqués.

Comme expliqué, l'embrayage K1 est alimenté lors du passage en première vitesse. Lors du passage en deuxième vitesse, l'embrayage K1 sera débrayé et un autre embrayage sera alimenté. Cela peut être vu dans le tableau.
Lors du passage en deuxième vitesse, l'embrayage K2 sera alimenté. La couronne du système 2 est alors fixée. Étant donné que le planétaire du système 2 est fixe et que le planétaire est entraîné, le support tournera. Ce transporteur pilotera à son tour le système 1. Dans le système 1, la couronne n'est cette fois pas bloquée, mais entraînée par un autre système. Dans ce cas, la vitesse de sortie (ligne du véhicule) aura donc une vitesse inférieure à celle lors du passage de la première vitesse.

Ceci est clarifié plus en détail sur cette page avec des images, des explications et des calculs.
Calculer le rapport de démultiplication de la première vitesse :
D'après le tableau ci-dessous, le lien K1 est fermé. La couronne est donc verrouillée. La force motrice du moteur passe par le planétaire et via le support jusqu'au véhicule. Les rapports sont également donnés, à savoir 1,00 pour le planétaire et 3,00 pour la couronne du système 1. Nous calculerons avec cela.
La formule de base pour calculer les rapports de démultiplication des systèmes d'engrenages planétaires est la suivante :
ω signifie oméga et est le vitesse angulaire tout en tournant.
Parce que nous calculons avec le système 1, nous mettons un 1 après tout. Nous modifions ce numéro pour les systèmes suivants. Surtout dans le cas de systèmes multiples (où un système pilote l’autre), cela doit être noté de cette façon, car sinon cela devient très déroutant.
Ci-dessous le schéma de la première vitesse. Pour plus de clarté, les Z (engrenage solaire), D (support) et R (couronne) sont dessinés en bleu.


Nous remplissons maintenant la formule de base du premier système. Les omégas sont inconnus et le porteur est immobile. Nous ne pouvons donc rien remplir pour cela. Les Z1 et D1 sont connus, nous allons donc les renseigner. R1 est stationnaire, nous le biffons donc. Nous n'ajoutons rien à la formule.
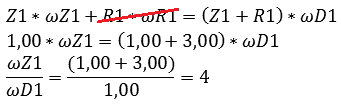
Vous voyez maintenant que le rapport de démultiplication du premier rapport est de 4.
Dans la technologie automobile, cela n'arrive jamais, il serait toujours légèrement supérieur ou inférieur à 4, car sinon les engrenages se touchent toujours sur les mêmes surfaces (usure supplémentaire). Mais ici, il est plus facile de calculer à titre d'exemple. Vous voyez désormais aussi que les omégas sont connus !
ωZ1 = 4
ωD1 = 1
Ces omégas sont les vitesses angulaires des axes du système. Les omégas ne sont pas vraiment importants en première vitesse, mais lors du calcul des systèmes à double entraînement (comme cela apparaîtra clairement en deuxième vitesse), ils sont importants.
Calculer le rapport de démultiplication de la deuxième vitesse :
Lors du calcul du rapport de transmission du deuxième rapport, il faut tenir compte du fait que le premier système est à double entraînement ; le planétaire du système 1 est entraîné par le moteur et le support est entraîné par le système 2. Il en résulte désormais une vitesse du véhicule différente de celle dans la situation où la couronne dentée était à l'arrêt (comme avec la première vitesse).

Lors du calcul, nous partons toujours du système qui est uniquement entraîné. Dans ce cas il s'agit du système 2, car il est uniquement entraîné par le moteur via le planétaire.
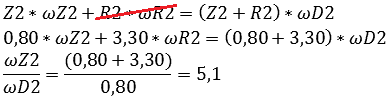
La transmission effectuée par le deuxième système est 5,1. Il ne s'agit pas de la transmission entre le moteur et les roues, mais entre le moteur et le système 1. Nous allons maintenant calculer le rapport de transmission du système 1 avec les données du système 2, car les omégas sont désormais connus :
ωZ2 = 4,1
ωD2 = 0,8
Si vous regardez maintenant le schéma, vous verrez que les planétaires des systèmes 1 et 2 sont reliés entre eux. Le porteur du système 2 et la couronne du système 1 sont également reliés l'un à l'autre. Les omégas des pièces connectées sont les mêmes, on peut donc dire :
ωZ2 = ωZ1 = 4,1
ωD2 = ωR1 = 0,8
Il est très important que cela soit soigneusement examiné ! Suivez toujours les lignes du diagramme.
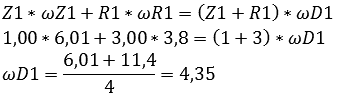
On rentre maintenant ces omégas dans le calcul du système 1.
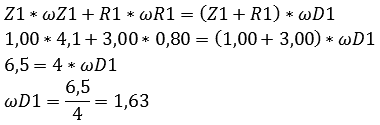
Nous pouvons maintenant déterminer le rapport de transmission final en divisant l'oméga d'entrée par l'oméga de sortie. Si l'on regarde le schéma on voit que l'oméga du système solaire 2 est entrant et l'oméga du système porteur 1 est sortant.
Le rapport de démultiplication total du 2ème rapport est donc de 2,52.
Calculer le rapport de démultiplication du troisième rapport :
Lors du calcul du troisième rapport, il faut tenir compte du fait que les trois systèmes fonctionnent ensemble. Commencez toujours par le système à entraînement unique. Dans ce cas, c'est le troisième :

Le planétaire du système 3 est fixe, il ne participe donc pas. Entrez ensuite le reste de toutes les valeurs :
Avec cela on obtient :
Ensuite on passe au système 2. Vous entrez les omégas connus pour le système 3 dans le calcul du système 2 :
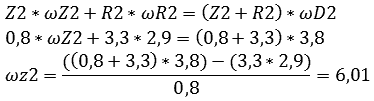
Passons maintenant au système 1. Ici aussi, les omégas connus sont renseignés :
Au final on obtient :
Cela signifie que le rapport de démultiplication total du troisième rapport est de 1,38.
Calculer le quatrième rapport de vitesse :
En quatrième vitesse, l'embrayage K4 est fermé. Cela signifie que les planétaires des systèmes 1, 2 et 3 sont couplés simultanément au moteur. L'ensemble du système est désormais bloqué. Tous les omégas sont égaux.
Si tous les omégas sont égaux, aucun rapport de démultiplication n’est possible. Le régime moteur est transmis directement aux roues. Nous appelons cela le prix direct.