Thèmes:
- Préface
- Moteur électrique AC (synchrone, à aimants permanents)
- Commande AC du moteur synchrone
- Moteur électrique à courant alternatif (moteur asynchrone à cage d'écureuil)
- Carte d'efficacité du moteur électrique synchrone et asynchrone
Préface:
Un moteur électrique est utilisé pour propulser un véhicule hybride ou entièrement électrique. Le moteur électrique convertit l’énergie électrique (provenant de la batterie ou du prolongateur d’autonomie) en mouvement pour entraîner les roues. De plus, le moteur électrique peut également convertir l’énergie cinétique en énergie électrique lors du freinage du moteur : freinage par récupération. Dans ce cas, le moteur électrique fonctionne comme une dynamo. En raison de ces deux fonctions, on appelle aussi le moteur électrique une « machine électrique ».
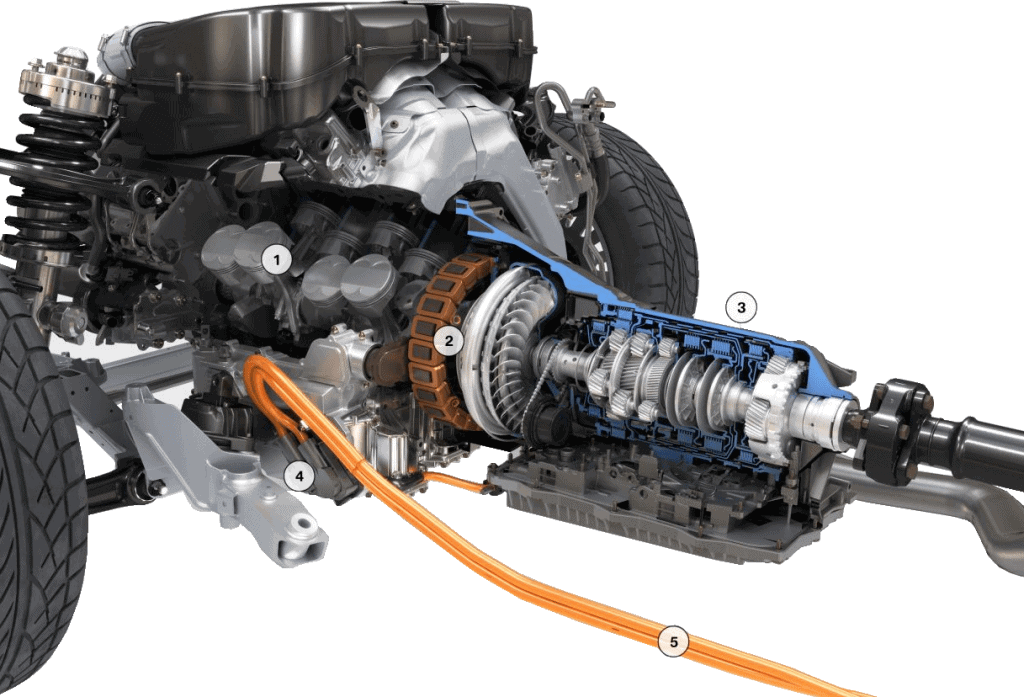
Les options pour placer le moteur électrique dans un véhicule hybride sont :
- Sur le moteur thermique, où la transmission est réalisée via une multi-courroie ou directement via le vilebrequin ;
- Entre moteur et boîte de vitesses : l'arbre d'entrée de la boîte de vitesses est entraîné par le moteur électrique ;
- Intégré à la boîte de vitesses ;
- Sur le différentiel ;
- Au niveau des moyeux de roue (moteur de moyeu).
Le moteur électrique d’une voiture entièrement électrique est souvent monté sur l’essieu arrière. L'image ci-dessous montre le moteur électrique avec l'onduleur dans un boîtier cylindrique et l'entraînement final d'une Tesla.

Moteur électrique AC (synchrone, à aimants permanents) :
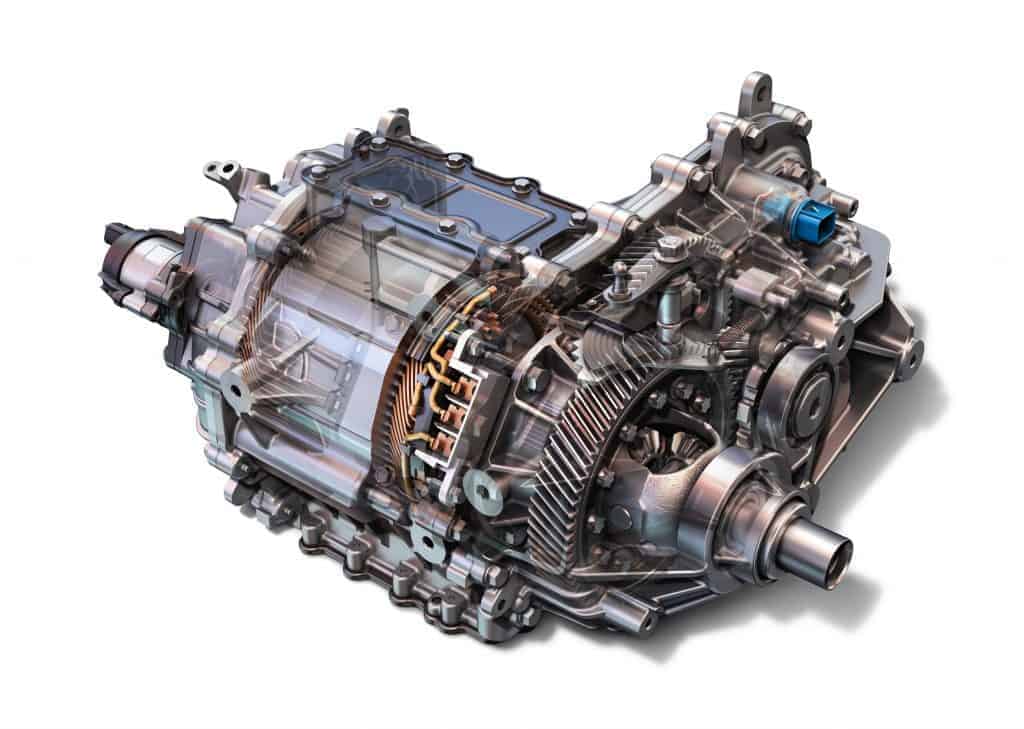
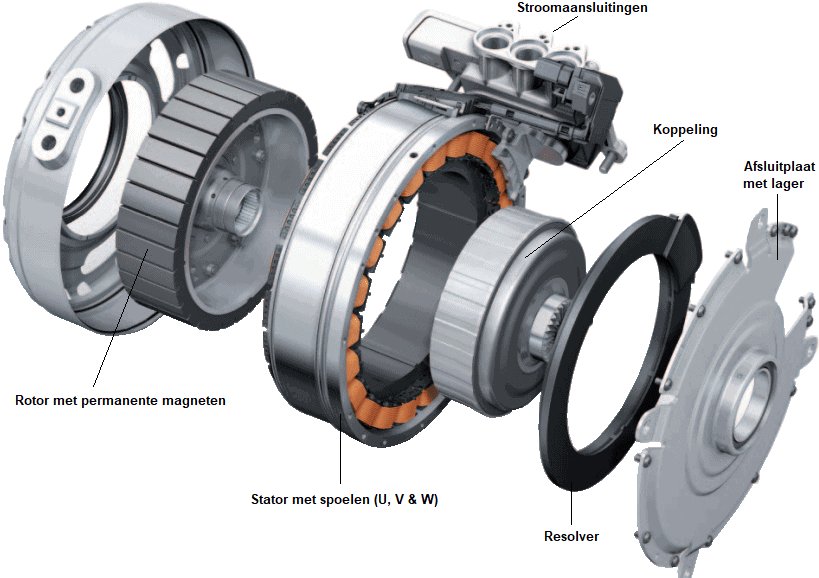
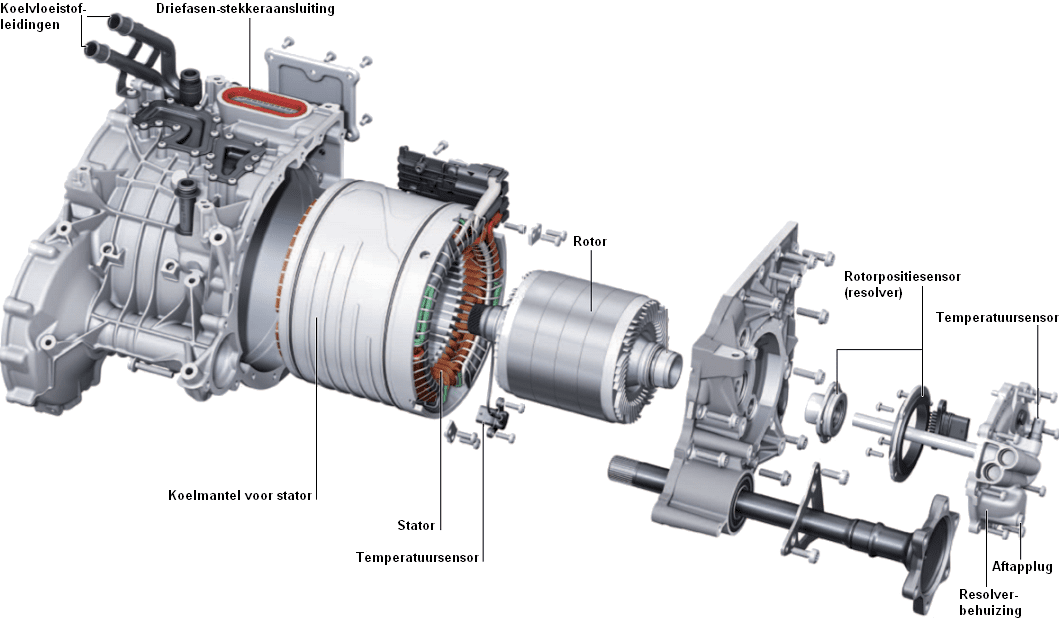
L'image suivante montre les pièces d'un moteur électrique Audi (synchrone). Ce type est utilisé dans les variantes hybrides des A6 et A8. Nous énumérerons brièvement les composants. Ces composants sont décrits en détail dans les paragraphes suivants.
Le rotor à aimants permanents commencera à tourner suite à un changement du champ magnétique dans le stator. Le rotor est relié à l'embrayage, qui peut connecter ou déconnecter le moteur à combustion et le moteur électrique (en conjonction avec un embrayage (non représenté)) dans différentes conditions de fonctionnement. La position du rotor est déterminée par le résolveur mesurée : cette donnée est importante pour que les drivers de l'IGBT contrôlent les bobines du stator au bon moment.
Le moteur électrique à aimants permanents peut être commandé aussi bien en courant continu (tension continue) qu'en courant alternatif (tension alternative).
Le moteur synchrone est l’un des moteurs électriques les plus couramment utilisés dans les véhicules hybrides ou entièrement électriques. Ce type de moteur électrique est constitué d'un stator avec bobinages et d'un rotor avec plusieurs aimants permanents. Le rotor tourne à la même vitesse que le champ magnétique du stator. Le moteur synchrone peut être contrôlé comme suit :
- AC : contrôlé par un signal sinusoïdal (courant alternatif).
- DC : contrôlé par un signal carré ou trapézoïdal (courant continu)
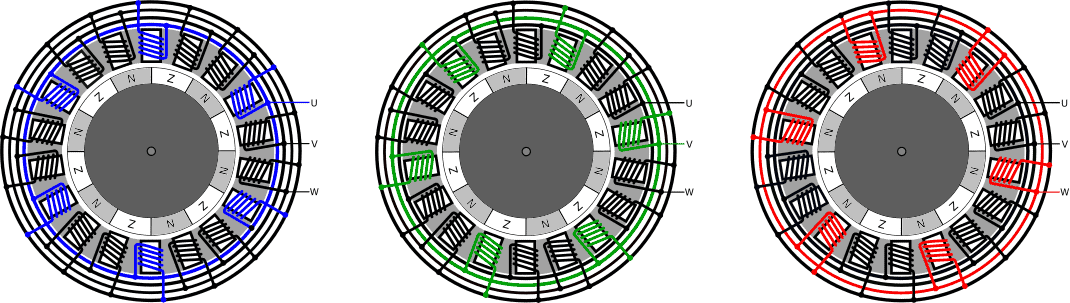
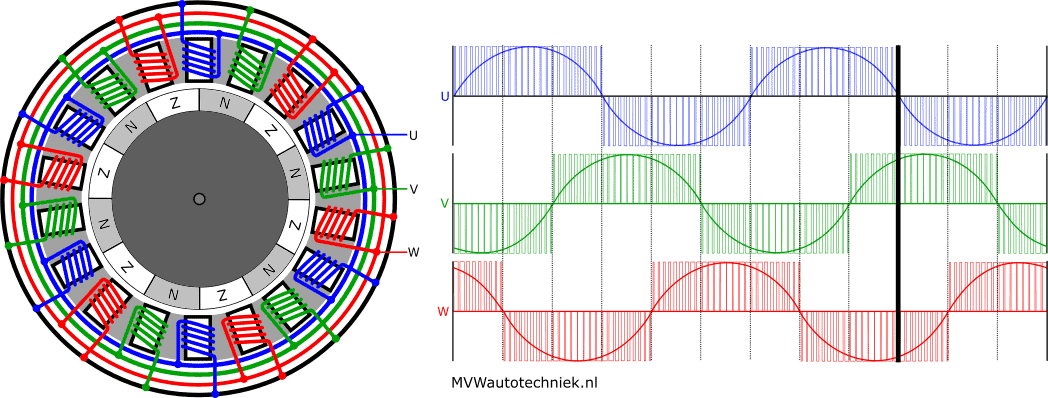
Le stator du moteur synchrone est composé de trois groupes de bobines statoriques : U, V et W. Chaque groupe contient trois ensembles de six bobines connectées en parallèle et réparties sur toute la circonférence du stator. Une bobine sur trois appartient à la même série.
- Bobines en U : bleues
- Bobines en V : vertes
- Bobines W : rouge
Le rotor contient plusieurs aimants permanents. En alimentant alternativement les bobines du stator, un champ magnétique tournant est créé. Le rotor suit le champ tournant et tourne donc.
Commande AC du moteur synchrone :
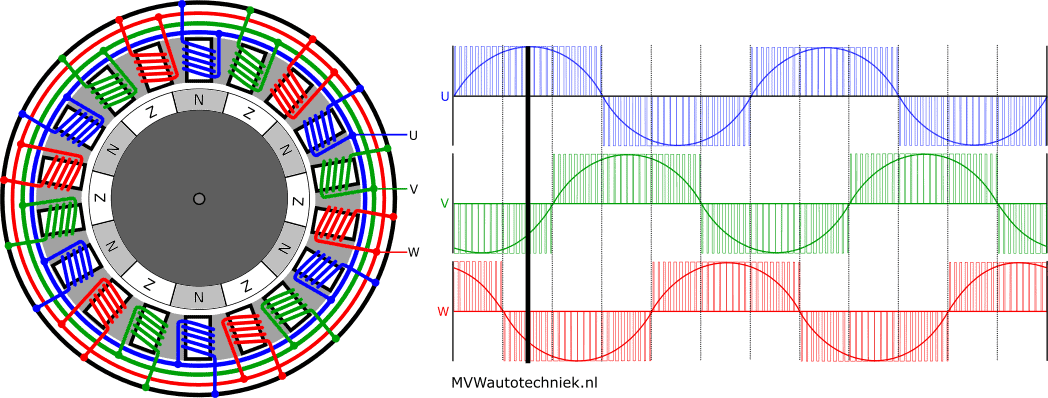
Le contrôle AC utilise un contrôle à fréquence contrôlée ou une commutation sinusoïdale. Les bobines du stator sont alimentées par une tension sinusoïdale triphasée alternative pour faire tourner le rotor.
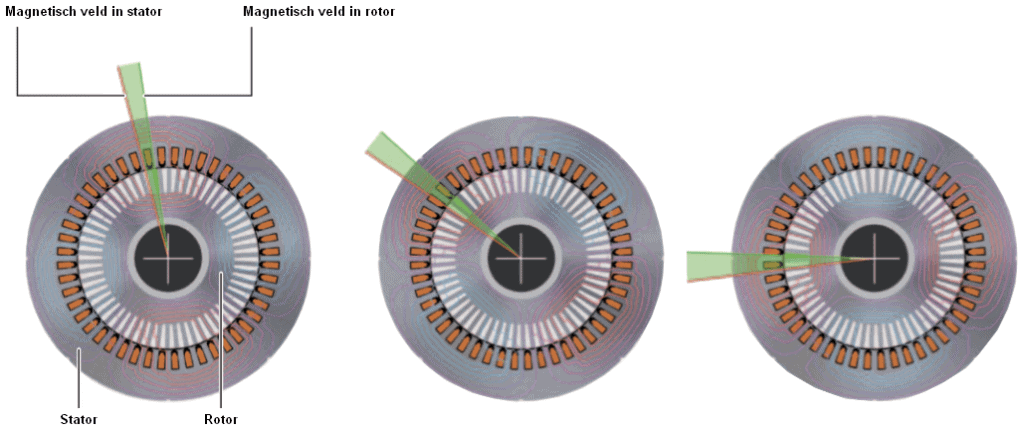
L'image ci-dessous montre la position du rotor avec une bobine en U excitée au maximum. En raison du champ magnétique, les pôles nord se sont positionnés directement en face des bobines en U sous tension. Le curseur dans le graphique à côté du moteur électrique indique le contrôle des bobines à ce moment-là.
Pour information : le rotor dans l'explication tourne lors du contrôle des bobines du stator dans le sens horaire.
Dans l'image suivante, l'onde sinusoïdale, c'est-à-dire le courant alternatif traversant la bobine en U, est au maximum négative. Lors de ce contrôle, les pôles sud du rotor sont directement opposés aux bobines du stator (U) sous tension.
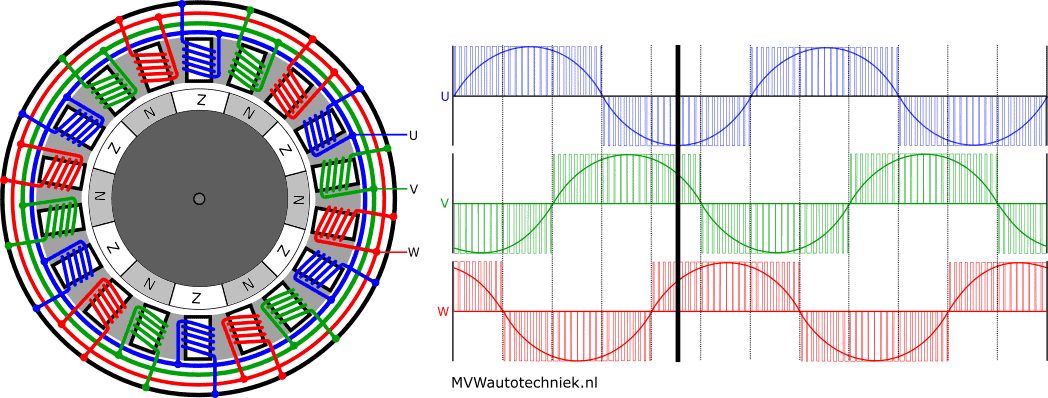
Il y a en fait un petit entrefer entre les pôles nord et sud du rotor. Lors du passage du pôle sud au pôle nord, la direction du courant dans la bobine en U change. Plus loin:
- Le courant traversant la bobine en V (verte) est presque au maximum positif ; le pôle nord est également presque en face de la bobine.
- Le courant traversant la bobine W a été au maximum négatif et augmente. Le pôle sud a tourné au-delà de la bobine.
Pour donner une idée de la façon dont le courant circule, l'animation ci-dessous montre la rotation du rotor due au courant alternatif.
Moteur électrique à courant alternatif (moteur asynchrone à cage d'écureuil) :
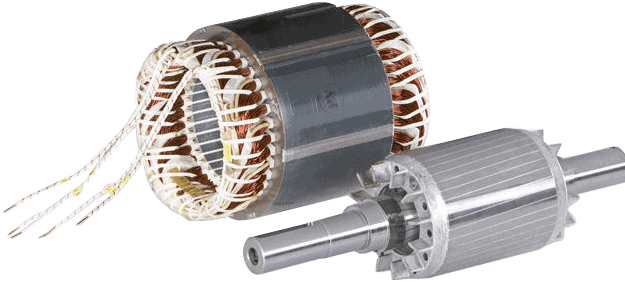
Le moteur électrique à cage d'écureuil ou à induit en court-circuit est un moteur asynchrone. La différence entre le moteur synchrone à aimants permanents et le moteur asynchrone réside dans le rotor : il s'agit d'un tambour en fer doux avec des conducteurs dans le sens longitudinal. Le rotor fonctionne de manière asynchrone avec le stator, ce qui signifie qu'il existe une différence de vitesse entre le rotor et la vitesse magnétique du stator. Le stator est exactement le même.
Le rotor du moteur électrique asynchrone est constitué de bobines en court-circuit ; les bobines U, V et W sont reliées entre elles d'un côté. Lorsque le rotor est dans le champ tournant du stator, une tension d'induction est créée dans les bobines du rotor. Étant donné que les bobines du rotor sont en court-circuit les unes avec les autres, un courant les traverse. Ce courant amène le rotor à générer un champ magnétique, créant un couple. Parce que le fonctionnement du moteur électrique asynchrone repose sur la loi de l’induction, on l’appelle aussi moteur à induction.
Le couple délivré affecte le glissement entre le champ magnétique tournant dans le stator et la vitesse du rotor.
Le moteur asynchrone présente de nombreux avantages et inconvénients par rapport au moteur synchrone.
Avantages :
- rotor relativement simple, robuste et peu coûteux ;
- couple élevé à basse vitesse.
Inconvénients:
- densité de puissance (par masse) et efficacité (efficacité) inférieures. Les courants dans les bobines du rotor en court-circuit entraînent des pertes supplémentaires dans le rotor ;
- la vitesse ne peut pas être contrôlée avec précision car elle dépend de la charge. En soi, cela ne doit pas être un inconvénient : avec un bon système de contrôle, la vitesse du moteur asynchrone peut également être ajustée ;
- courant de démarrage élevé.
La position du rotor et la vitesse du moteur asynchrone sont mesurées par un capteur de position du rotor. Les capteurs à effet Hall fournissent souvent au moins quatre impulsions par tour du rotor pour transmettre la position et la vitesse du rotor. Nous n'appelons pas ce type de capteur de position du rotor un résolveur, comme c'est le cas du moteur synchrone.
Contrairement au moteur synchrone, le capteur de position du rotor n'est pas nécessaire pour connaître la position du rotor à l'arrêt. La position du rotor est importante lors de la rotation : il faut veiller à ce que le glissement entre le champ magnétique tournant et le rotor ne devienne pas trop important. Lorsque le champ tournant se déplace trop rapidement, une situation peut survenir où le rotor veut soudainement tourner dans l'autre sens. Les forces qui en résultent peuvent être désastreuses pour les composants mécaniques et électriques.
Certains constructeurs choisissent également d'utiliser un moteur asynchrone résolveur postulant. La raison m'est inconnue. Dans tous les cas, le résolveur est extrêmement précis aussi bien à l’arrêt qu’en marche, ce qui peut bénéficier d’un contrôle précis.
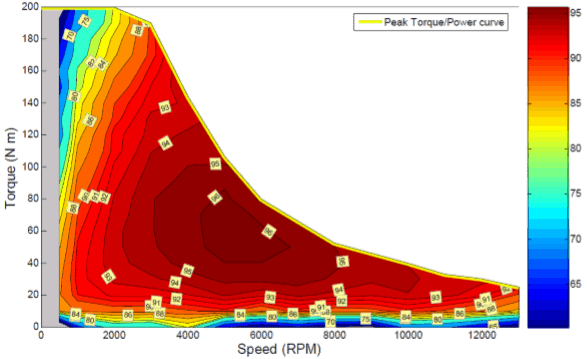
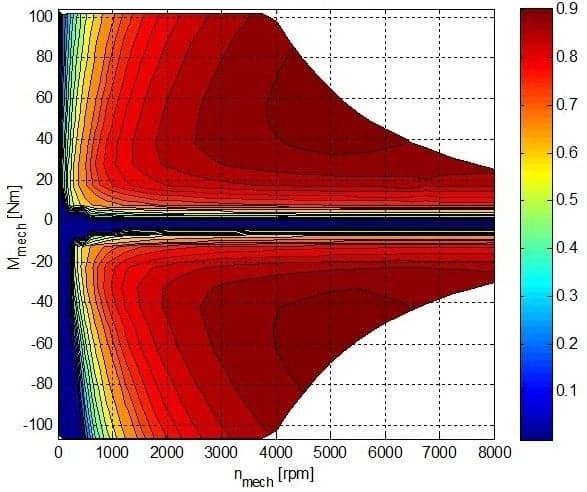
Carte d'efficacité du moteur électrique synchrone et asynchrone :
Les images ci-dessous montrent l'efficacité du moteur électrique synchrone (à gauche) et du moteur électrique asynchrone (à droite).
- Le moteur électrique synchrone est très efficace. L'efficacité est supérieure à 90 % sur une grande surface, avec des valeurs maximales allant jusqu'à 96 %. À partir de 2000 XNUMX tr/min, un affaiblissement du champ se produit, entraînant une diminution du couple maximal.
- Le moteur asynchrone a un rendement nettement inférieur à celui du moteur synchrone à des vitesses inférieures.