Aiheet:
- Yleinen pysäköintiapu
- Parkkietäisyyden säätö
- Peruutuskamera
- Sivukuva
- Surround-näkymä
- Pysäköintiapu
Yleinen pysäköintiapu:
Pysäköintitutka sisältää järjestelmiä, jotka auttavat kuljettajaa pysäköimään ja poistumaan pysäköinnistä. Tunnetuin pysäköintitutkajärjestelmä on "park distance control", lyhennettynä PDC. Tämä järjestelmä ilmoittaa ajoneuvon kuljettajalle etäisyyden autoon takana tai laajemmilla järjestelmillä myös ajoneuvon etuosaan. Tällä sivulla kuvataan nykyaikaisia tekniikoita, jotka ovat joko puistoetäisyyden hallinnan laajennus tai täysin erillinen avustusjärjestelmä.
Parkkietäisyyden hallinta:
Park Distance Control (PDC) on etäisyysvaroitusjärjestelmä, joka mittaa signaaleja pysäköintipaikoille saapuessaan ja sieltä poistuttaessa ja antaa tietoa etäisyydestä esteeseen. Ultraäänianturit ovat takapuskurissa ja usein myös etupuskurissa (katso kuva). Ne lähettävät erittäin korkeataajuisia ääniaaltoja, joita ihmiskorva ei huomaa. Nämä ultraäänen taajuudet heijastavat lähellä olevista kohteista ja anturi vastaanottaa ne. Anturi mittaa aikaa näiden signaalien lähettämisen ja vastaanottamisen välillä. Mitä lähempänä kohde on, sitä nopeammin signaali palautuu. Anturi tallentaa sen ja välittää sen PDC-ohjausyksikköön (tietokoneeseen).
Tämä tietokone voi lähettää sen kuljettajalle äänisignaaleina sekä kuva- että äänisignaaleina. Sitten kuuluu piippausääni, joka nopeutuu, kun kohde tulee lähemmäksi. Noin 30 cm:n etäisyydellä se antaa jatkuvan piippauksen, joka kertoo sinulle kuljettajana, että sinun on pysähdyttävä.

Nykyaikaiset ajotietokoneet on usein varustettu lisävarusteella, jossa etäisyys kohteeseen näytetään näytöllä. PDC-anturit ovat samat; ohjausyksikkö laskee antureilta saadut tiedot ja käsittelee ne tiedoksi, joka voidaan näyttää näytöllä.
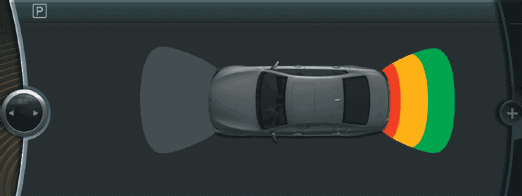
Alla olevassa kuvassa näkyy PDC-ohjausyksikkö (ECU). Tämä harmaa neliö sisältää mikro-ohjaimen, vahvistimen ja JA-portin. Mikrokontrolleri lähettää neliöaaltojännitettä, jonka taajuus on noin 40 kHz (musta). Myös matalataajuinen lohkojännite lähetetään ajoittain (punainen/sininen). JA-portti vastaanottaa kaksi lohkojännitettä. Kun molemmat jännitteet ovat korkeita, lähtöjännite (JA-portin oikealla puolella) on korkea. Kun toinen kahdesta jännitteestä on alhainen, myös lähtö laskee. Lähtöjännite lähetetään takaisin mikrokontrolleriin ja PDC-anturin lähettimeen. Lähetin lähettää ultraäänisignaalia noin 300 m/s nopeudella. Kun esine on lähellä, ultraääniääni heijastuu ja vastaanotin rekisteröi sen. Kutsumme tätä "kolmioiksi". Vastaanotin lähettää muodostetun lohkosignaalin ECU:lle. Lohkosignaali vahvistetaan vahvistimella, minkä jälkeen mikro-ohjain käsittelee sen.
AND-portin lähtösignaalin vastaanottamisen ja vahvistimen välinen aika on etäisyyden mitta kohteeseen. Mitä pienempi etäisyys PDC-anturin ja kohteen välillä on, sitä lyhyempi aika. Mikrokontrolleri ohjaa summeria tai kommunikoi muiden ohjausyksiköiden kanssa CAN-väylän kautta.
Alla oleva kytkentäkaavio (VAG) esittää ohjausyksiköiden välisen tiedonsiirron, tulot kytkimiin ja lähdöt muun muassa summeriin.
PDC-ohjausyksikkö (J446) vastaanottaa ajonopeuden ja peruutussignaalin CAN-väylän kautta. PDC-ohjausyksikkö lähettää moduloidun lohkojännitteen liitännän T12/11 kautta kaapelijatkokseen (X86 takapuskurissa), joka on kytketty kaikkiin PDC-antureihin (G203, G334, G335 ja G206). Jokaisella PDC-anturilla on oma signaalijohto (nastan 2 kautta) ECU:hun. Lisäksi kunkin anturin maadoitus on yhdistetty maadoitushitsaukseen (352).
Kun yksi tai useampi anturi havaitsee kohteen, ohjausyksikkö aktivoi summerin (H15). Riippuen etäisyydestä kohteeseen, summeri antaa nopeamman tai hitaamman katkonaisen äänimerkin.

Diagnostiikkaliitännän (J533) kanssa tapahtuvan tiedonsiirron ansiosta on mahdollista suorittaa seuraavat diagnoositoiminnot:
- kyselyn vikamuisti
- Säädä ohjausyksikön koodausta (esim. kun olet laajentanut järjestelmää PDC-antureilla edessä tai kun olet asentanut vetokoukun)
- säädä summerin äänenvoimakkuutta
- Kysele mittausarvolohkoja muun muassa etäisyydestä kaikista antureista kohteeseen, lasketusta etäisyydestä sekä lähettimen ja vastaanottimen stabilointiajasta.
Peruutuskamera:
Pysäköintitutka voidaan varustaa pysäköintietäisyyden säädön lisäksi myös peruutuskameralla. Heti kun kuljettaja laittaa auton peruutusvaihteelle tai painaa painiketta sisätiloissa, ajoneuvon takana oleva kamera aktivoituu. Yleensä radion tai ajotietokoneen näytöllä näkyy kuva.
Alla olevassa kuvassa on BMW-näyttö, jonka kuva on ajoneuvon takana. Kamerakuvan oikealla puolella on ajoneuvo, jonka edessä ja takana on kolmiosainen ristikko; Tämä näyttää etäisyyden kohteeseen, jonka PDC-anturit rekisteröivät.
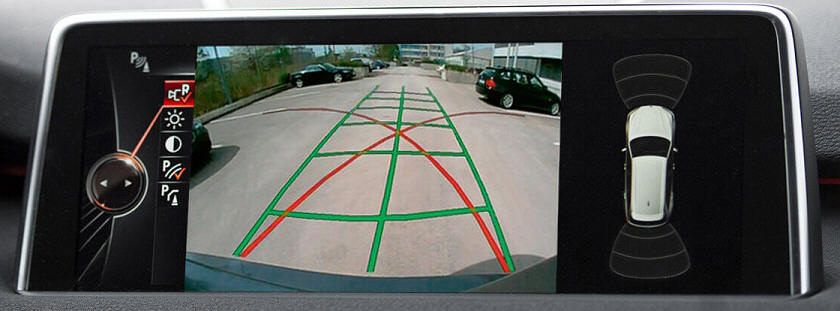
Peruutuskamerakuvassa näkyy punaisia ja vihreitä viivoja. Punaiset viivat osoittavat mahdollisen suunnan, johon ajoneuvoa voidaan ohjata; Maksimiohjauksella pyörät seuraavat punaista viivaa mutkan ulkopuolella. Vihreä ruudukko seuraa ohjaustangon kääntämissuuntaa; tällä hetkellä etupyörät ovat suoraan eteenpäin. Kun kuljettaja kääntää ohjauspyörää, vihreät viivat osoittavat todelliset ajolinjat. Ohjauskulma-anturi rekisteröi ohjauspyörän asennon.
Peruutuskamera on joskus näkyvissä ja sijaitsee usein lähellä rekisterikilpiä ja/tai kahvaa takaluukun avaamiseksi. Joskus valmistajat päättävät asentaa kameran poissa näkyvistä. Alla olevassa kuvassa näkyy VW Golfin peruutuskamera, jossa sähkömoottori kallistaa VW-tunnusta ja siirtää kameraa ulospäin. Tunnus taittuu automaattisesti taaksepäin, kun ajat uudelleen eteenpäin. Sen lisäksi, että kamera ei ole näkyvissä, myös linssi likaantuu nopeammin.

Sivukuva:
Kun peruutat kahden ajoneuvon tai suuren esineen välillä, sinun täytyy ajaa hieman eteenpäin katsoaksesi vasemmalle ja oikealle. Tämä on paljon helpompaa sivukameralla (kutsutaan myös kulmakuvaksi); etupuskurin vasemmalla ja oikealla olevat kamerat lähettävät kuvan kojelaudan näytölle. Kuvassa näkyy kulmakameroiden kuva. Valitettavasti kameroita ei voi asentaa näkymättömästi. Sivukameralla varustetuissa autoissa on (usein) musta linssi puskurissa. Alla olevassa kuvassa näkyy BMW:n etupuskuri vasemmalla kameralla.


Surround-näkymä:
Ylellisimpiin pysäköintitutkajärjestelmiin kuuluu epäilemättä "surround view", joka tunnetaan myös nimellä ylhäältä näkymä, 3D tai lintunäkymä. Jokainen merkki antaa järjestelmälle oman nimensä ja ominaisuutensa. Käytämme nyt nimeä surround view.
Surround-näkymässä auton yläosa näkyy näytöllä. Näyttää siltä, että siellä on kamera, joka katsoo auton kattoa ja sitä ympäröivää aluetta. Auto on simulaatio ja ympäristöä tallentavat useat (yleensä neljä) kamerat.
Seuraavat kolme kuvaa (BMW:ltä) esittävät kuljettajan näkemän kuvan. Pysäköinnin aikana parkkipaikan ja esineiden, kuten pylväiden yms. välinen ero on selvästi näkyvissä. Peruutettaessa voit zoomata taakse; Täällä voit nähdä pääasiassa kasveja. Perinteiset PDC-anturit tallentavat etäisyyden kasveihin. Tietokone merkitsee tämän etäisyyden punaisella värillä.

Eteenpysäköinnin aikana järjestelmä voi näyttää myös ympäristön ja etuosan. PDC-anturit auttavat nyt myös määrittämään etäisyyden aitaan.

Rinnakkaispysäköinti reunakiveykselle voi, jos kuljettaja ei ole varovainen, vahingoittaa renkaita ja vanteita. Myös tilanäkymä tarjoaa nyt ratkaisun; Hyvän katunäkymän ansiosta voit pysäköidä suoraan ja lähelle reunakiveyttä. BMW:n uusin kehitys mahdollistaa kameran kuvan kääntämisen ja ajoneuvon simuloinnin.

Seuraavat kolme kuvaa näyttävät paikat, joissa kamerat usein sijaitsevat.



Pysäköintitutka:
Pysäköintitutkan jatkeena ns. pysäköintitutka voi auttaa kuljettajaa poistuessaan parkkipaikalta taaksepäin rajoitetun näkyvyyden ollessa kyseessä. Tämä voi tapahtua tilanteissa, joissa ajoneuvo on pysäköity seinän viereen tai ajoneuvojen väliin.
Auton takana olevat anturit havaitsevat ajoneuvon takaa kulkevan liikenteen ja mahdollisesti aiheuttavan törmäysvaaran. Tämä sisältää kaikki liikkuvat esineet, jotka lähestyvät ajoneuvoa tietyllä nopeudella. Kun pysäköintitutka havaitsee lähestyvän ajoneuvon, infotainment-järjestelmän näyttöön tulee viesti. Tähän lisätään yleensä akustinen äänimerkki. Jos kuljettaja ei huomioi näitä signaaleja ja ajaa taaksepäin, järjestelmä puuttuu fyysisesti jarruihin ja hidastaa ajoneuvoa.
