Aiheet:
- esittely
- Invertteri
- Regeneratiivinen jarrutus
Esipuhe:
Täyssähkö- tai hybridikäyttöisten ajoneuvojen sähkömoottorit toimivat vaihtovirralla (AC). Sähkömoottorin energia ei tule suoraan akusta, sillä se syöttää vain tasajännitettä (DC). Akun tasajännite syötetään akulle invertteri muunnetaan sähkömoottorin vaihtojännitteeksi.
Lisäksi löydämme muuntimet jotka muuttavat alhaisen tasajännitteen korkeammaksi jännitteeksi (tehostinmuunnin). Akun jännitettä voidaan "korostaa" sähkömoottorille (650 volttia) tai laskea sisäisen akun akun lataamiseksi (14 volttia). Muuntajaa käytetään myös vaihtamaan suurjännitteestä matalaan jännitteeseen, esimerkiksi syöttämään sisustustarvikkeita 12 tai 24 voltin jännitteellä (henkilö- tai raskaat hyötyajoneuvot). Napsauta tätä saadaksesi muunninta käsittelevän sivun.
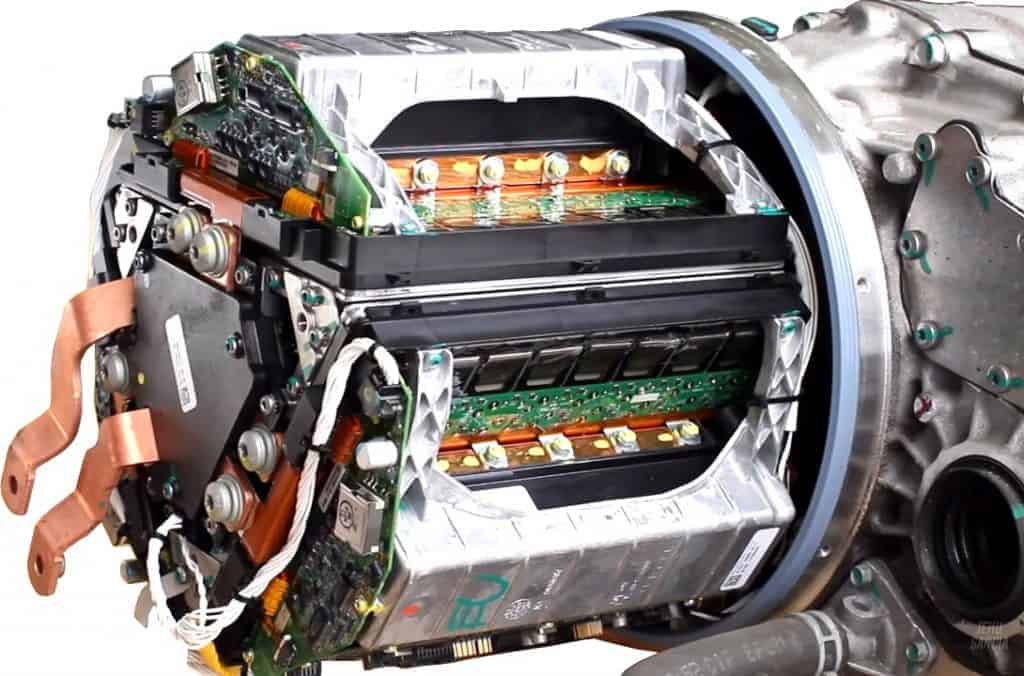
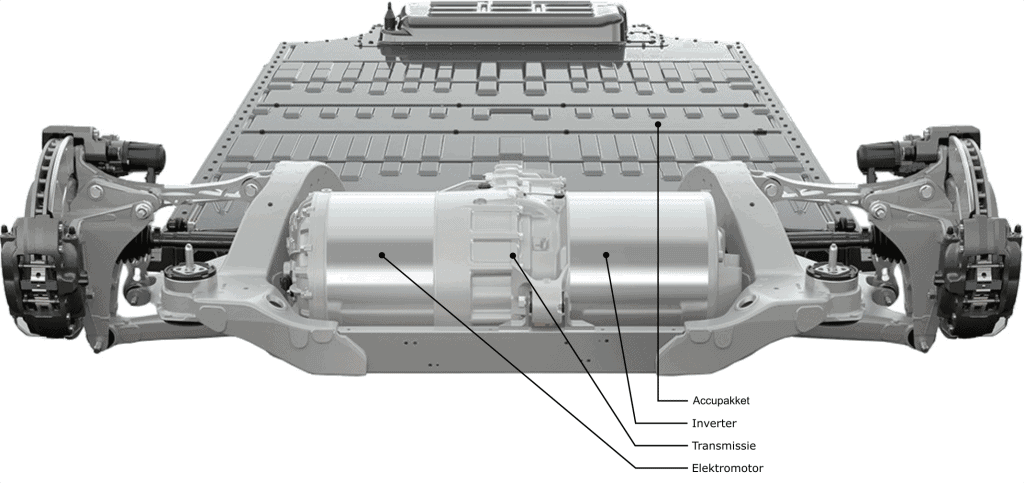
Seuraava kuva on Tesla Model S:stä: vaihtosuuntaajan sisusta ja yleiskuva ns. "käyttöyksiköstä", jossa invertteri, voimansiirto ja sähkömoottori sijaitsevat yhteisessä yksikössä takajousituksessa.
invertteri:
"Boost converter" -osan kuva näyttää yleiskatsauksen tehostusmuuntimella, vaihtosuuntaajalla kahdellatoista IGBT:llä ja kahdella sähkömoottorilla (MG1 ja MG2).
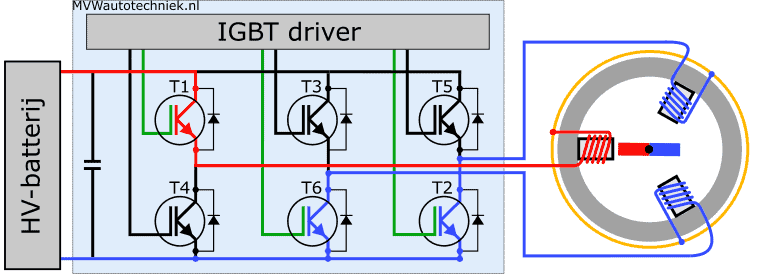
Seitsemän alempaa kaaviota esittävät transistorien ohjauksen ja virran suunnan staattorikäämeille ja niiltä. Tehostusmuunnin ja IGBT + MG2 on jätetty pois mukavuuden vuoksi. Näemme sen kaavion vasemmalla puolella HV-akkupaketti; tämä on suurjänniteakku, johon on tallennettu noin 200-800 voltin jännite. Akun oikealla puolella näemme kondensaattorin. Kun HV-järjestelmä on aktivoitu, HV-suojajärjestelmä säätelee aluksi rajoitettua virtaa HV-akusta vastuksen avulla. Tämä tehdään kondensaattorin lataamiseksi hitaasti ennen kuin HV-järjestelmä on täysin toimintavalmis.
Lisäksi näemme kuusi suuritehoista transistoria. Nämä ovat IGBT:t, jotka ohjaavat sähkömoottoria. IGBT:itä ohjaa ohjausyksikkö; tämä on merkitty "IGBT-ajuriksi". Oikealla näemme staattorin, jossa on kolme kelaa (U, V ja W), jotka ovat väriltään sinisen ja punaisen. Staattorin keskellä on roottori, joka saa liikkeen magnetismin vaikutuksesta, katso sähkömoottoria koskeva kappale.
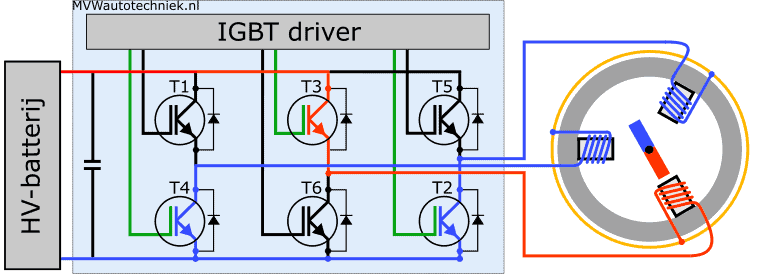
Ylätransistorit (T1, T3 ja T5) kytkevät positiiviset liitännät HV-akusta staattorikäämiin, kun ohjausyksikkö kytkee transistorit päälle. Pohjatransistorit (T2, T4 ja T6) johtavat massat suurjänniteakun miinuspuolelle.
Tällä hetkellä ohjattavien IGBT:iden porttikytkennät näkyvät vihreänä. Synkronisella moottorilla ohjausyksikkö "lukee" moottorin asennon roottorin asentotunnistin määrittääkseen, mitä IGBT:tä sen tulee hallita. Roottorin asentoanturia kutsutaan myös a resolveri nimeltään.
1. Ohjatut IGBT:t:
- T1: plus (100 % kontrolloitu);
- T2: massa (50 % ajettu);
- T6: massa (50 % ajettu).
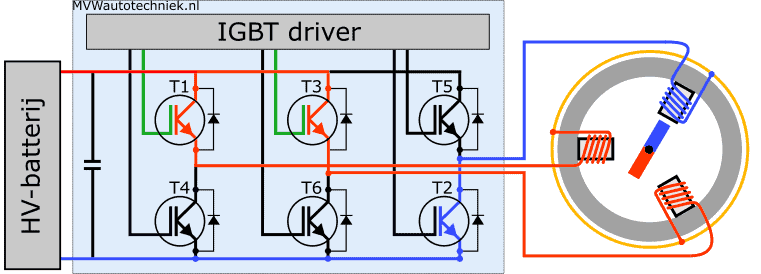
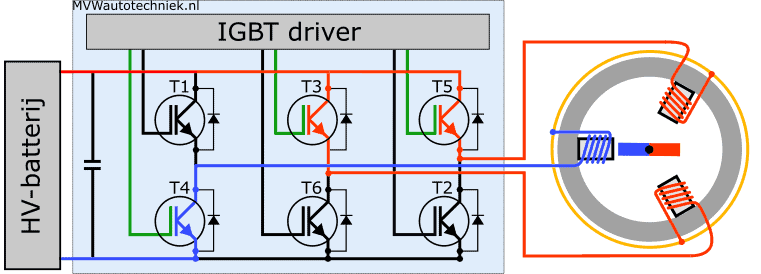
2. Ohjatut IGBT:t:
- T1: plus (50 % kontrolloitu);
- T3: plus (50 % kontrolloitu);
- T2: massa (100 % ajettu).
Roottori kääntyy muuttuneen magneettikentän seurauksena.
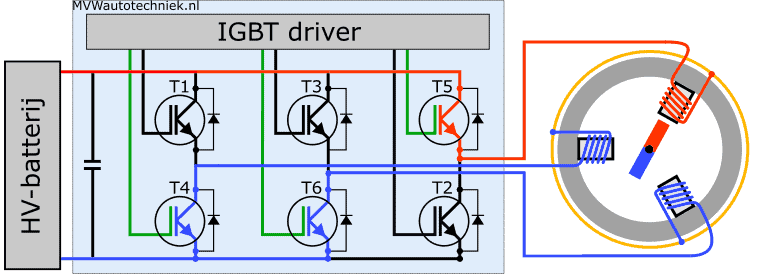
3. Ohjatut IGBT:t:
- T3: plus (100 % kontrolloitu);
- T2: massa (50 % ajettu);
- T4: massa (50 % ajettu).
Roottori kääntyy muuttuneen magneettikentän seurauksena.
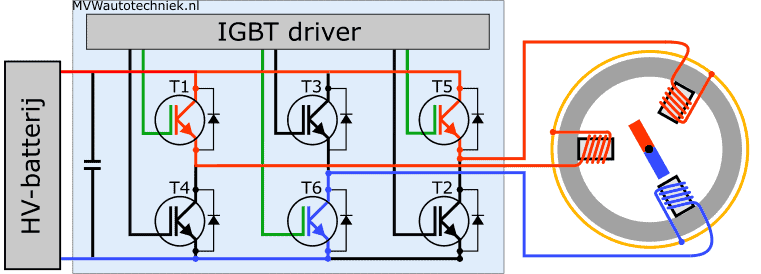
4. Ohjatut IGBT:t:
- T3: plus (50 % kontrolloitu);
- T5: plus (50 % kontrolloitu);
- T4: massa (100 % ajettu).
Roottori kääntyy muuttuneen magneettikentän seurauksena.
5. Ohjatut IGBT:t:
- T5: plus (100 % kontrolloitu);
- T4: massa (50 % ajettu);
- T6: massa (50 % ajettu).
Roottori kääntyy muuttuneen magneettikentän seurauksena.
6. Hallittu IGBT:t:
- T1: plus (50 % kontrolloitu);
- T5: plus (50 % kontrolloitu);
- T6: massa (100 % ajettu).
Roottori kääntyy muuttuneen magneettikentän seurauksena.
7. Hallittu IGBT:t:
- T1: plus (100 % kontrolloitu);
- T2: massa (50 % ajettu);
- T6: massa (50 % ajettu).
Roottori on nyt kiertynyt 360 astetta (1 täysi kierros) tilanteesta 1. Transistoripiireillä varustettu jakso toistuu uudelleen.
Invertteri muuntaa HV-akusta tulevan tasajännitteen 1-vaiheiseksi sinimuotoiseksi vaihtojännitteeksi. Alla olevat kolme kuvaa näyttävät:
- Vasemmalla: kelan lataus;
- Keskimmäinen: kelan purkaminen;
- Oikealla: kelan lataus- ja purkukäyrä.
Saavutamme käämin latauksen ja purkamisen ohjaamalla transistorin kantaa neliöaaltojännitteellä. Kun kela puretaan, magneettikenttä putoaa ja induktiojännite muodostaa lyhytkestoisen induktiovirran. Sammutusdiodi varmistaa, että kela purkautuu.

1-vaiheinen sinimuotoinen muoto saadaan muuttamalla käyttöjaksoa, jolla transistori tulee johtavaksi. Seuraava teksti koskee alla olevia kuvia.
- Vasen: tällä taajuudella kela ei voi ladata riittävästi ja syntyy keskimääräinen jännite;
- Oikealla: IGBT-ohjain säätää toimintajaksoa. Lataus- ja purkausaika määräävät käämin läpi kulkevan virran määrän.
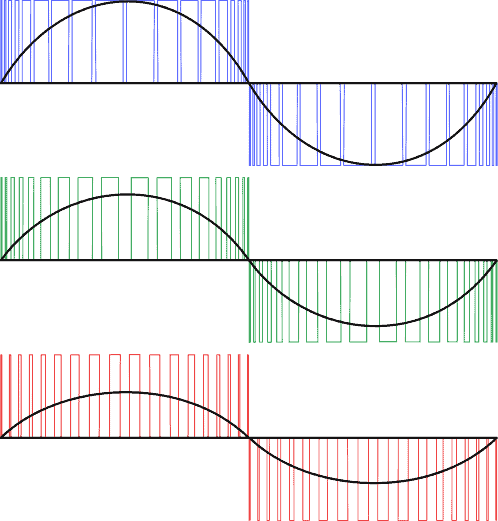
Invertterin IGBT:t kytkeytyvät jatkuvasti päälle ja pois päältä. Päälle- ja poiskytkennän välinen suhde tapahtuu PWM-säätimen mukaan. Mitä leveämpiä pulsseja (korkeampi käyttösuhde), sitä suurempi virta kulkee kelan läpi ja sitä tehokkaampi sähkömoottori. Keskimääräinen virta ilmaistaan mustalla siniaalolla. Seuraavassa kuvassa on kolme sinimuotoista ohjaussignaalia:
- Sininen: korkea ohjaus. Käyttömäärä on korkea. Virrasta tulee maksimi.
- Vihreä: keskimääräinen ohjaus. Käyttösuhdeprosentti on pienempi kuin korkealla ohjauksella. Virta on siis pienempi.
- Punainen: alhainen ohjaus. Jälleen kerran käyttösuhdeprosentti on laskenut. Virran voimakkuus on puolitettu maksimisäätöön verrattuna.
Siniaalto on positiivinen puolijakson ajan ja negatiivinen toisen puoliskon ajan. DC-AC-invertterin IGBT:t on kytketty siten, että tasajännite (DC) muunnetaan vaihtojännitteeksi (AC). Staattorikäämien läpi kulkevan virran suunta vaihtuu ajoittain.
siniaaltojen määrän lisääminen aikayksikköä kohti lisää roottorin nopeutta.
Seuraava animaatio esittää invertterin ohjauksen. Invertterin alapuolella näet kolmen vaiheen ajan kulun. Roottori pyörii kaksi täyttä kierrosta (360 astetta) animaatiossa. Jokainen kierros on jaettu kuuteen aikayksikköön (1-6). Alla näet värilliset palkit:
- Tummansininen: T1
- Vihreä: T2
- Vaaleansininen: T3
- Oranssi: T4
- Pinkki: T5
- Punainen: T6
Keskitymme ajan kulumisen ensimmäisen puoliskon vallankumoukseen:
- Nollasta 0 asteeseen roottori pyörii puoli kierrosta. IGBT T180:tä ohjattiin tänä aikana.
- 0 ja 60 asteen välillä olivat aktiivisia T1:n lisäksi myös T5 ja T6.
- T1 kytkee plus-, T5- ja T6-maan. Jokaisella transistorilla oli oma toimintajaksonsa, joka vaihteli välillä 50-100%.
- 60 asteen kulmassa T2 siirtyy T5:stä: virran suunta kelassa on käänteinen.
- Sillä hetkellä on vaihtojännite: koska virran suunta on muuttunut, virran intensiteetti on negatiivinen.
Ohjatakseen oikeita keloja AC-synkronisessa sähkömoottorissa vaihtosuuntaajan kanssa, invertteri tarkastelee signaalia resolveri. Resolveri rekisteröi roottorin asennon sekä paikallaan että pyöriessä.
Regeneratiivinen jarrutus:
Moottoria jarrutettaessa sähkömoottoria käytetään generaattorina (dynamo). Ajoneuvon liike-energia muunnetaan sähköenergiaksi: akku latautuu.
IGBT:t kytkeytyvät pois päältä regeneratiivisen jarrutuksen aikana: kuljettaja ei hallitse niitä. Tasasuuntausdiodit IGBT:iden lähteen ja nielun välillä toimivat tasasuuntaajana, joka muuntaa moottorin vaihtojännitteen akun tasajännitteeksi.
Täyssähkö- ja hybridiajoneuvoissa on sähköjarrun lisäksi myös perinteinen hydraulinen jarrujärjestelmä jarrupalojen ja jarrulevyjen avulla. Eri tekniikat ja ohjausperiaatteet löytyvät sivulta: sähköajoneuvojen jarrutus.