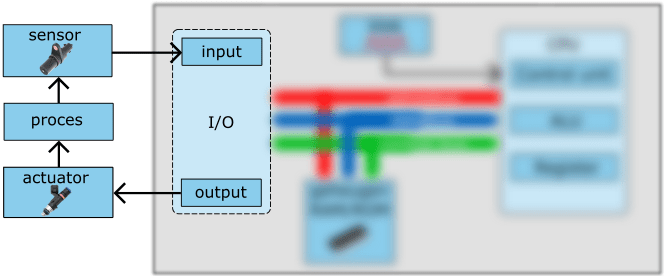
Esipuhe: Useimmissa tapauksissa antureiden sähköiset signaalit on säädettävä ennen kuin ne esitetään prosessorille. Toimilaitteita ohjataan tietokoneen toisella puolella. Nämä ovat usein induktiivisia piirejä, jotka usein kytkevät suuria virtoja. Anturin signaalien ja toimilaitteen virtojen säätämiseen tarkoitettua laitteistoa kutsutaan liitäntäpiireiksi. Liitäntäpiiri varmistaa analogisen muuntamisen digitaaliseksi jännitteeksi.
anturit lähettää jännitettä pienellä virralla. Liitäntäpiiri muuntaa jännitteen digitaaliseksi arvoksi (0 tai 1). Virran intensiteetti on alhainen anturin signaalilla;
Toimilaitteet vaativat suurempaa virtaa. että ohjaustoimilaitteet, sijaitsevat ECU:ssa transistoreiden tai FETien (yhdistelmän) muodossa, joita kutsutaan myös "ajureiksi". Keskustelemme tästä yksityiskohtaisemmin "lähtösignaalit" -osiossa.
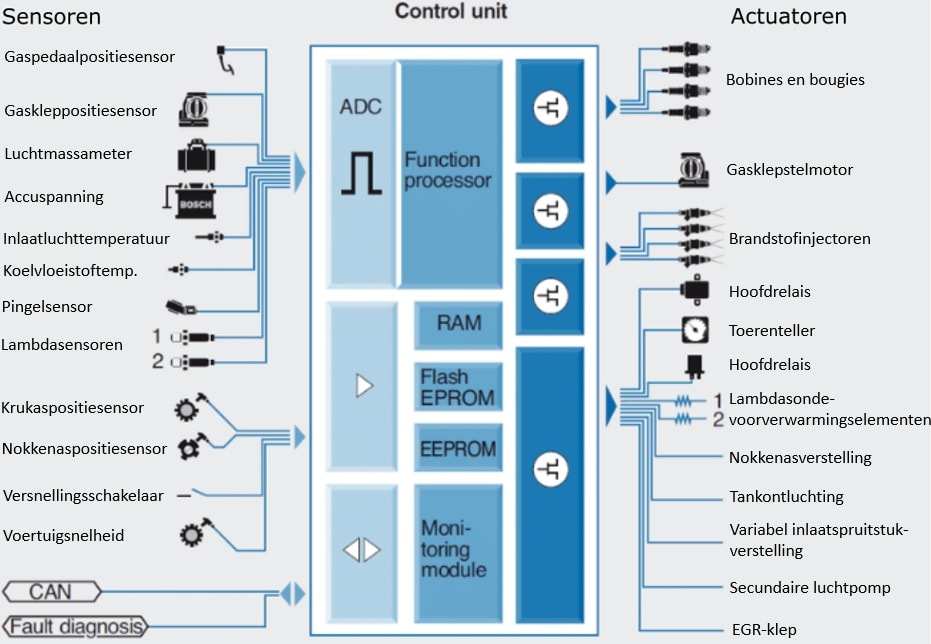
Alla olevassa kuvassa näkyvät (bensiini)moottorin hallintajärjestelmän anturit ja toimilaitteet. Ylin anturiryhmä (kaasupolkimen asentotunnistimesta lambda-antureihin) kuuluu "analogiseen" luokkaan. Tämä tarkoittaa, että saapuvat anturin jännitteet on ensin digitalisoitava ADC:ssä (analogi-digitaalimuunnin). Alempi anturiryhmä (kampiakselin asentotunnistin ajoneuvon nopeusanturiin) välittää signaalinsa jo digitaalisesti. On-off-signaalit tai lohkojännitteet syötetään suoraan CPU:hun.
Oikeanpuoleisia toimilaitteita ohjataan pääteasteella. Pääteaste, jota kutsutaan myös ohjaimeksi, koostuu useiden transistorien piiristä, joka tuottaa käyttökelpoisen jännitteen ja virran tietokoneen ohjauspulssista toimilaitteen ohjaamiseksi.
Moottorin ohjausjärjestelmä antureilla (vasemmalla) ja toimilaitteilla (oikealla)
Transistoritransistorilogiikka (TTL): Prosessori toimii 5 voltin jännitteellä. Tulo- ja lähtöjännitteet on siksi rajoitettu alueelle 0 - 5 volttia (TTL-taso, lyhenne sanoista Transistor Transistor Logic). Tästä jännitetasosta poikkeaville signaaleille tehdään säätö liitäntäpiirissä.
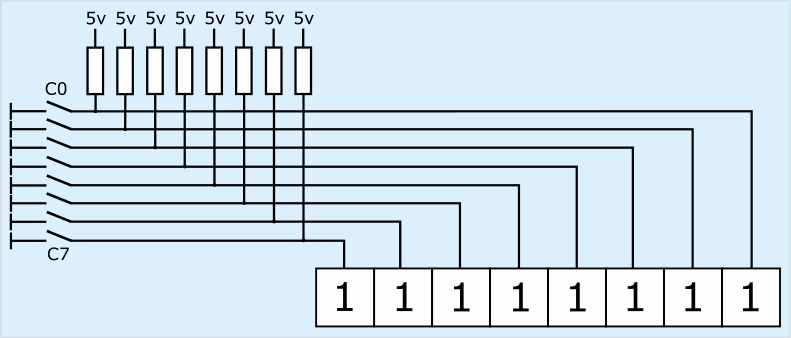
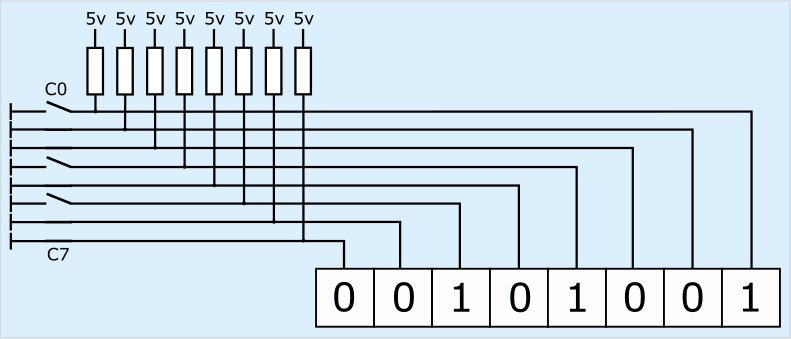
Alla olevissa kuvissa näkyy, kuinka 1 tai 0 muodostetaan kytkimen asennosta. Vetovastuksen avulla 5 voltin jännite tuottaa a looginen 1 prosessorin tulossa, kun kytkin avataan. Vetovastuksen yli olevaa jännitettä ei tällöin ole kytketty maahan. Kun kytkimet sulkeutuvat, vetovastuksen yli tapahtuu jännitehäviö. 0 voltin jännite prosessorin tulossa nähdään seuraavasti looginen 0.
Kaikki kytkimet auki: 11111111 prosessoritulossa
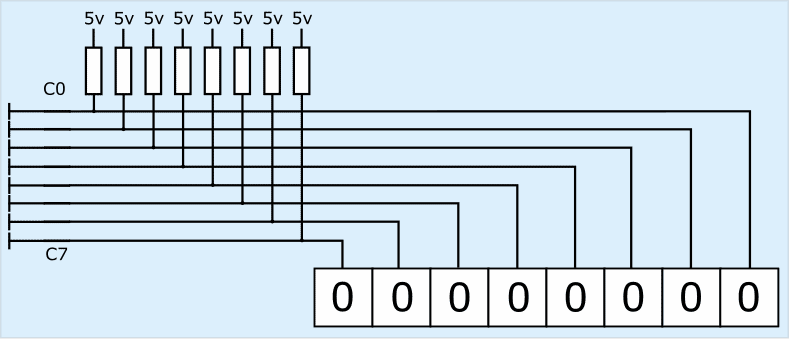
Kaikki kytkimet kiinni: 00000000 prosessorin tulossa
Avointen ja suljettujen kytkimien yhdistelmä tuottaa sarjan ykkösiä ja nollia. Kuvassa 8-bittinen viesti prosessorille on: 00101001.
8-bittisessä prosessorissa kahdeksan bittiä luetaan samanaikaisesti per jakso. Seuraavan jakson aikana, joka tapahtuu kellon seuraavan tikityksen aikana (katso järjestelmäväylä ECU:n toimintaa käsittelevällä sivulla) seuraa sekvenssi, jossa on kahdeksan uutta bittiä.
Avatut ja suljetut kytkimet: 00101001 prosessoritulossa
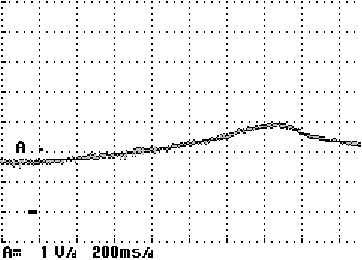
Analogisten anturin jännitteiden muuntaminen digitaaliseksi viestiksi: Prosessori käsittelee digitaaliset tulosignaalit suoraan. Analogiset signaalit muunnetaan ensin digitaaliseksi signaaliksi A/D-muuntimessa. Esimerkkinä otetaan turbopaineanturin analoginen jännitekäyrä:
tyhjäkäynnillä jännite on noin 1,8 volttia;
kiihdytettäessä jännite nousee lähes 3 volttiin.
Jännitteen muutosta ei voida käsitellä suoraan prosessorissa. Ensin mitattu jännite on muutettava desimaaliarvoksi (0 - 255).
Alueella 0 - 5 volttia ja desimaaliarvolla 0 - 255 (eli 256 mahdollisuutta). Yksinkertainen laskelma osoittaa, että jos jaamme 5 volttia 256 mahdollisuuteen, voidaan tehdä 19,5 mV (0,0195 voltin) askeleita.
Yllä oleva esimerkki osoitti turbopaineanturin jännitteen kehityksen ajan funktiona. Lämpötila-anturin ja kaasupolkimen asentoanturin jännitekäyrä ovat samat, vain eri aikakehyksessä: jäähdytysnesteen lämmittäminen kestää kauemmin kuin turbon kelaaminen.
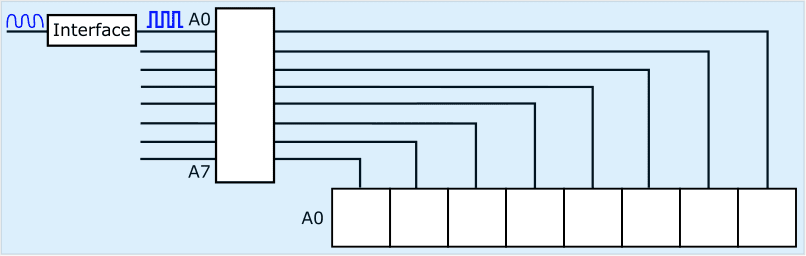
Aiemmin tässä osiossa on kuva, joka näyttää analogisten signaalien luokan. Tämä näyttää muun muassa lämpötila-anturin ja kaasupolkimen asentotunnistimen. Analoginen jännite muunnetaan 8-bittiseksi informaatioyksiköksi A/D-muuntimessa. Monissa prosessoreissa, joissa on useita tulonastaja, on vain yksi A/D-muunnin. Useita analogisia signaaleja yhdistetään yhdeksi signaaliksi multipleksoimalla.
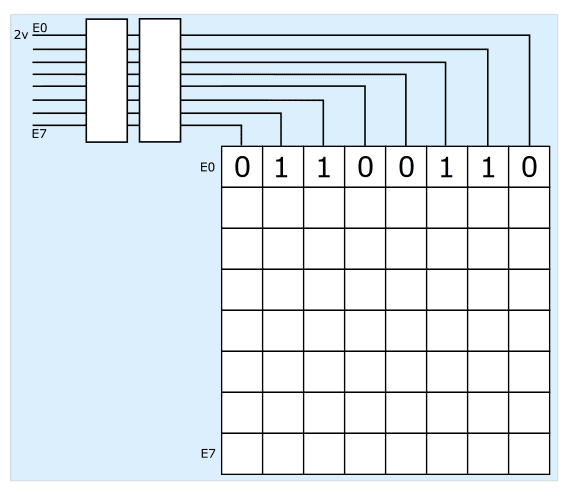
Tässä esimerkissä näemme A/D-muuntimen, jossa on kahdeksan tuloa. Nastassa 0 on 2 voltin jännite. Nastat E1 - E7 voidaan syöttää jännitteillä samanaikaisesti. Nämä muunnetaan yksitellen digitaaliseksi viestiksi multipleksoimalla.
2 voltin jännite muunnetaan binääriarvoksi. Seuraavalla kaavalla voimme muuntaa analogisen jännitteen desimaaliarvoksi ja muuntaa sen sitten binääriarvoksi:
2v / 5v * 255d = 102d
Tässä jaetaan tulojännite (2v) maksimijännitteellä (5v) ja kerrotaan tämä maksimidesimaaliarvolla (255).
Laskemalla tai tekemällä hienon tempun voimme muuntaa desimaaliluvun 255d binääriarvoksi 01100110. Katso sivu tästä: binääri, desimaali, heksadesimaali.
8-bittinen A/D-muunnin
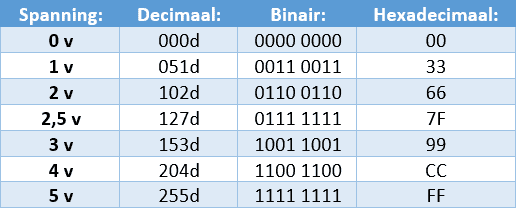
Seuraava taulukko näyttää eri jännitteisiin liittyvät desimaali-, binaari- ja heksadesimaaliarvot.
Kun luet reaaliaikaista dataa, anturin signaalin desimaali-, binääri- tai heksadesimaaliarvo saattaa näkyä.
<0,5 voltin (025d) jännitesignaalia pidetään oikosulkuna maahan;
Jos signaali nousee yli 4,5 voltin (220d), tietokone kääntää tämän oikosulkuksi plussan kanssa.
Jännite desimaali-, binääri- ja heksadesimaaliarvoina
Pulssigeneraattorin signaalien muuntaminen digitaaliseksi viestiksi: Signaalit pulssigeneraattoreista, mukaan lukien induktiivinen kampiakselin asentoanturi, ovat itse asiassa on-off-signaaleja, jotka syntyvät sen jälkeen, kun pulssipyörän hampaat ovat siirtyneet anturin ohi. Anturin vaihtojännite on ensin muutettava neliöaaltojännitteeksi ennen kuin signaali esitetään prosessorille.
Kuvassa näemme sinimuotoisen vaihtojännitteen rajapinnan vasemmalla puolella. Liitäntäelektroniikassa tämä vaihtojännite muunnetaan neliöaaltojännitteeksi. Ajastin/laskurilohko lukee tämän lohkojännitteen: kun pulssi on korkea, laskuri alkaa laskea ja lopettaa laskemisen, kun pulssi nousee jälleen korkeaksi. Laskujen määrä on ajanjakson ajan mitta. signaalin taajuutta.
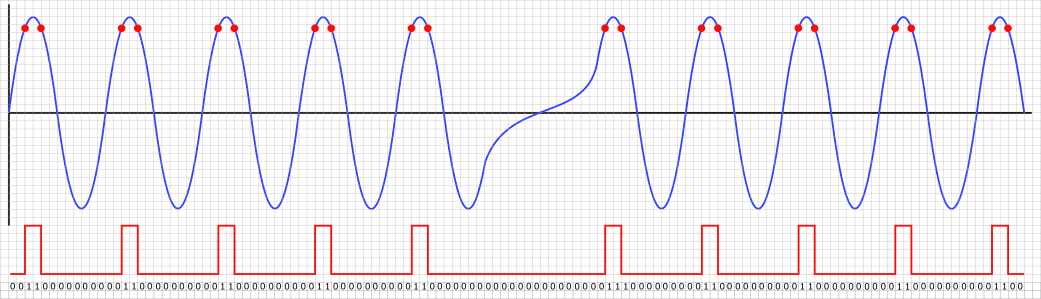
Alla olevassa kuvassa näemme signaalin induktiivisesta kampiakselin anturista punaisilla pisteillä yläreunassa. Punaiset pisteet asetetaan jännitteeksi, joka lisää (logiikka 1) tai laskee (looginen 0) lohkojännitettä. Selitys jatkuu tämän kuvan alla.
Sinimuotoinen vaihtojännite ja digitoitu signaali ilman hystereesiä
Anturin jännite ei kuitenkaan ole koskaan täysin puhdas. Jänniteprofiilissa on aina pieni vaihtelu. Siinä tapauksessa liitäntäelektroniikka saattaa ilmoittaa tämän väärin loogisena 0:na, vaikka sen pitäisi itse asiassa olla 1.
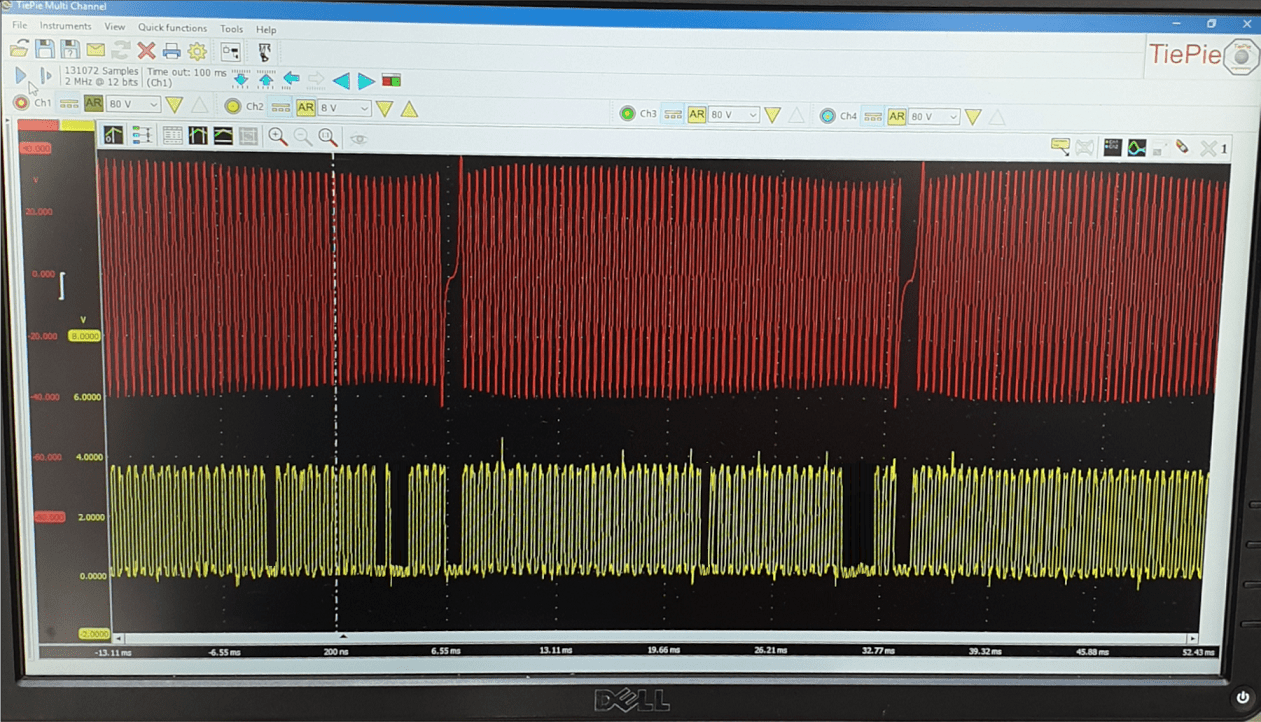
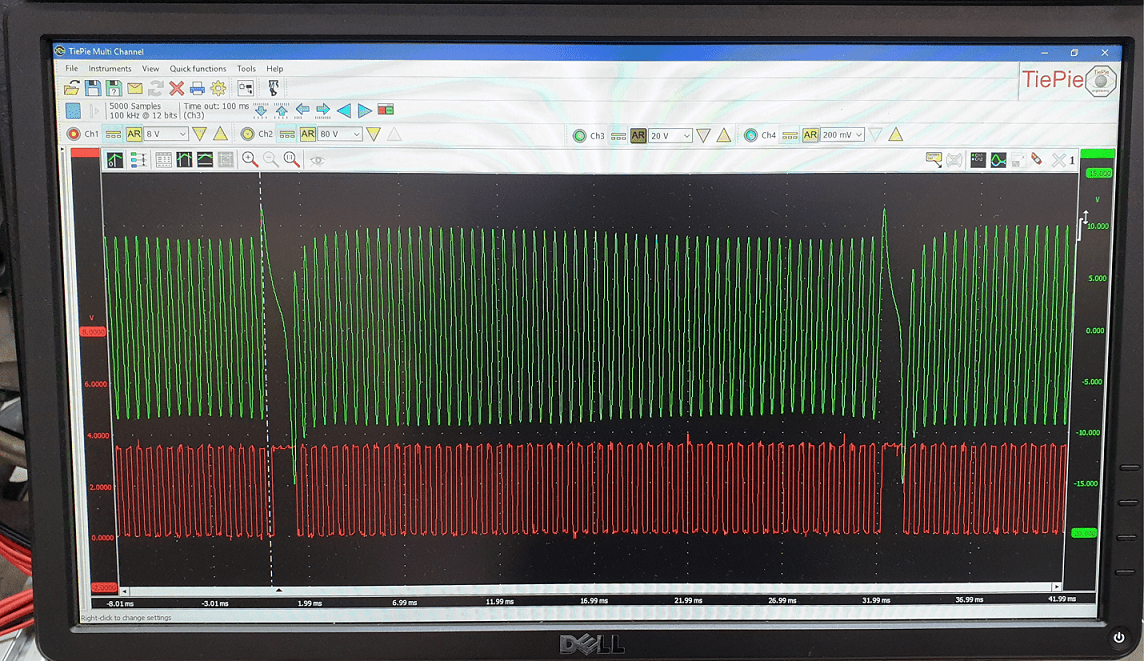
Alla oleva kuva on tallennettu sen ajon aikana BMW Megasquirt -projekti. Kiikarikuvassa näkyy induktiivisen kampiakselin signaalin (punainen) digitalisaatio (keltainen). Kuvasta näkyy selkeästi, että keltaisesta lohkosignaalista puuttuu pulsseja, kun taas kampiakselin signaalissa ei tällä hetkellä ole yhtään puuttuvaa hammasta.
Epäpuhdas digitaalinen signaali sisältää virheitä: tästä puuttuu tietoja
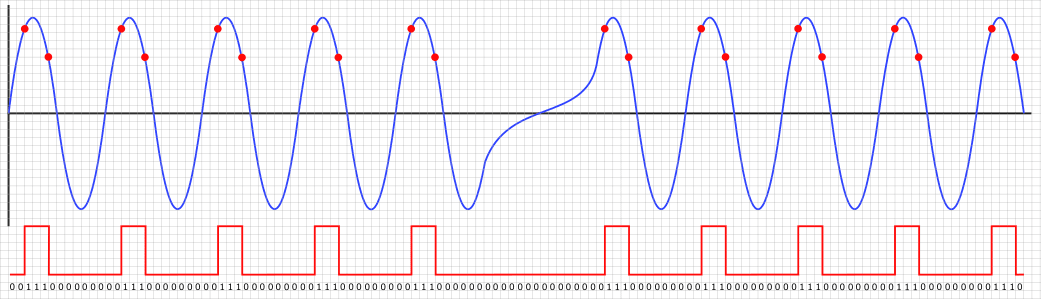
Sen varmistamiseksi, että pienet vaihtelut jänniteprofiilissa eivät aiheuta ECU:n virheellistä tulkintaa, on sisäänrakennettu ns. hystereesi. Hystereesi on ero jänniteprofiilin nousevien ja laskevien reunojen välillä. Alla olevassa kuvassa näemme, että nousevien reunojen punaiset pisteet ovat korkeammalla jännitteellä kuin putoavien reunojen punaiset pisteet. Näin voimme olla varmoja siitä, että signaalin pienet vaihtelut eivät vaikuta digitaaliseen muuntoon.
Ensimmäisessä kappaleessa, jossa aloitimme pulssisignaalin muuntamisesta digitaaliseksi signaaliksi, mainittiin jo, että signaalin taajuus määräytyy neliösignaalin kahden nousevan reunan välisen ajan perusteella. Näistä esimerkeistä voidaan selvästi päätellä, että hystereesi vaikuttaa neliömäisen signaalin leveyteen, mutta sillä ei ole vaikutusta nousevien reunojen väliseen aikaan, eikä siten vaikuta signaalin taajuuteen.
Oikein asetetulla hystereesillä sinimuotoinen signaali muunnetaan oikein käyttökelpoiseksi neliöaaltojännitteeksi, jolloin vain useat loogiset ovat paikoissa, joissa puuttuva hammas kulkee.
Huomaa, että MegaSquirt ECU:n asennuksen aikana asetuksia muutettiin, mukaan lukien laukaisu nousevilla ja laskevilla linjoilla. Tämän seurauksena ensimmäisessä esimerkissä puuttuvaa hammasta ohitettaessa jännite on 0 volttia ja alla olevassa kuvassa jännite on 5 volttia.
Pulssigeneraattorin signaali puhtaalla ja oikealla neliöaaltojännitteellä
Lähtösignaalit: Lähtösignaalit koostuvat digitaalisista on/off-pulsseista, joiden jännitealue on 0–5 volttia (TTL-taso) erittäin alhaisella virralla. Toimilaitteet vaativat kuitenkin ohjausta korkeammilla jännitetasoilla ja virroilla. On/off-signaalit voivat olla pulssinleveysmoduloituja (PWM), jossa pulssin leveys voi vaihdella vakiotaajuudella.
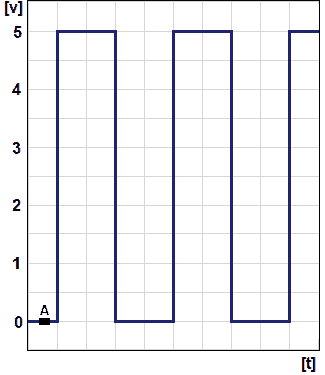
Seuraavassa kuvassa on esitetty TTL-tason neliöaaltojännite ajan funktiona. The käyttöjakso tästä PWM-signaalista on 50 %.
Toimilaitteiden ohjaamiseen tarvitaan ajureita. Digitaalisella lähtösignaalilla voidaan saavuttaa tarvittava virta ohjaimella. Seuraavassa osiossa keskustelemme kuljettajista.
Esimerkki: PWM-signaali
Löydämme ohjaimia jokaisesta ECU:sta ja joistakin toimilaitteista, kuten DIS-sytytyspuolasta. Ohjainta kutsutaan myös lähtöasteeksi tai tehotransistoriksi. Ohjain mahdollistaa lähtösignaalien muuntamisen TTL-tasolla: 0 - 5 volttia pienellä 1 mA:n virralla ECU:sta jopa 14 voltin jännitteiksi ja noin 10 A:n virroiksi.
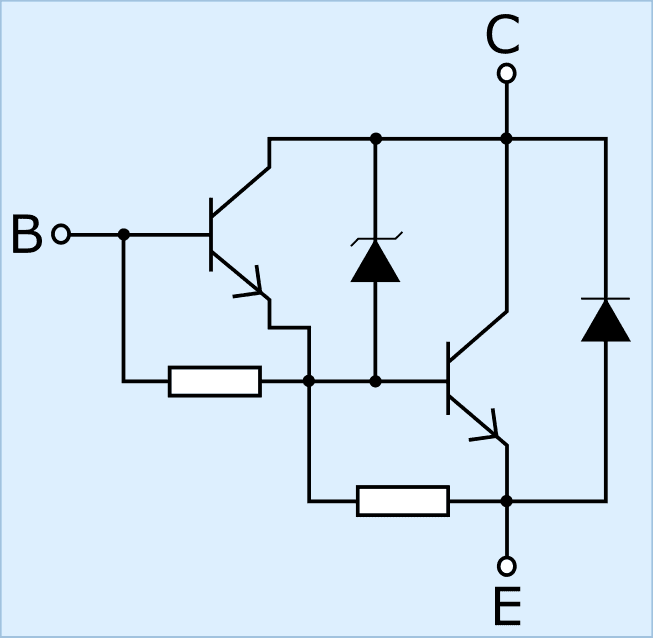
Kuljettaja voi yhdistää useita transistorit sisältää. Kutsumme tällaista transistoria "Darlington transistori". Seuraavat kuvat näyttävät seuraavat piirit:
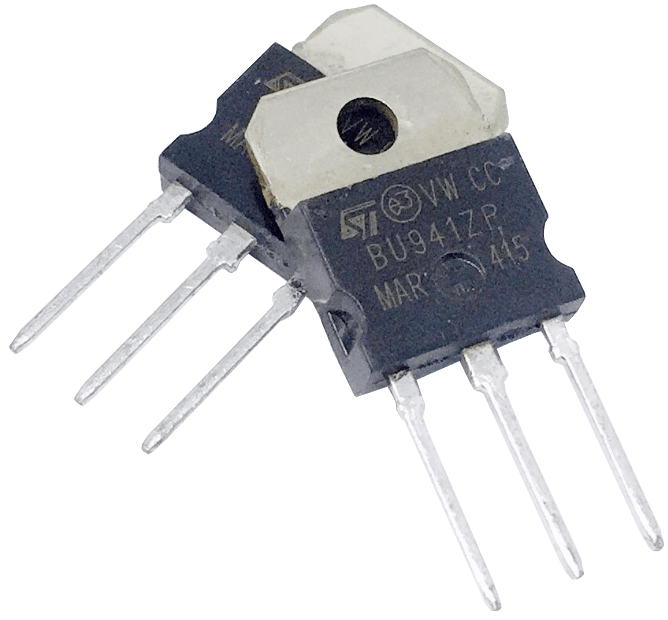
Kaavio Darlington-piiristä, jossa on kaksi transistoria sytytyspuolan ohjaukseen (lähde: tietolehti BU941ZR).
Kaksi transistoria, joissa kummassakin Darlington-piiri (BU941ZR)
Ajuripiirit Darlington-piireillä ja lisäelektroniikassa muun muassa lämpötilasuojaukseen ja takaisinkytkentään mikroprosessoriin.
1. Darlington-rata
2. Darlington-transistorit (2x)
3. Ohjainpiirit, joissa on useita Darlington-piirejä
Sivulla: toimilaitteiden ohjaustavat Passiivisten, aktiivisten ja älykkäiden toimilaitteiden ohjausta (teho)transistorin tai FETin avulla käsitellään tarkemmin.