Aiheet:
- esittely
- AC-sähkömoottori (synkroninen, kestomagneeteilla)
- Synkronisen moottorin AC-ohjaus
- AC-sähkömoottori (asynkroninen, oravahäkkimoottori)
- Synkronisen ja asynkronisen sähkömoottorin tehokkuuskartta
Esipuhe:
Sähkömoottoria käytetään hybridi- tai täyssähköauton ajamiseen. Sähkömoottori muuntaa sähköenergian (akusta tai kantaman jatkeesta) liikkeeksi pyörien ajamiseksi. Lisäksi sähkömoottori voi muuntaa kineettistä energiaa sähköenergiaksi moottoria jarruttaessa: regeneratiivinen jarrutus. Tällöin sähkömoottori toimii dynamona. Näiden kahden toiminnon vuoksi kutsumme sähkömoottoria myös "sähkökoneeksi".
Vaihtoehdot sähkömoottorin sijoittamiseksi hybridiautoon ovat:
- Polttomoottorissa, jossa voimansiirto tapahtuu monihihnan tai suoraan kampiakselin kautta;
- Moottorin ja vaihteiston välissä: vaihteiston tuloakselia käyttää sähkömoottori;
- Integroitu vaihteistoon;
- On tasauspyörästö;
- Pyörän navoissa (napamoottori).
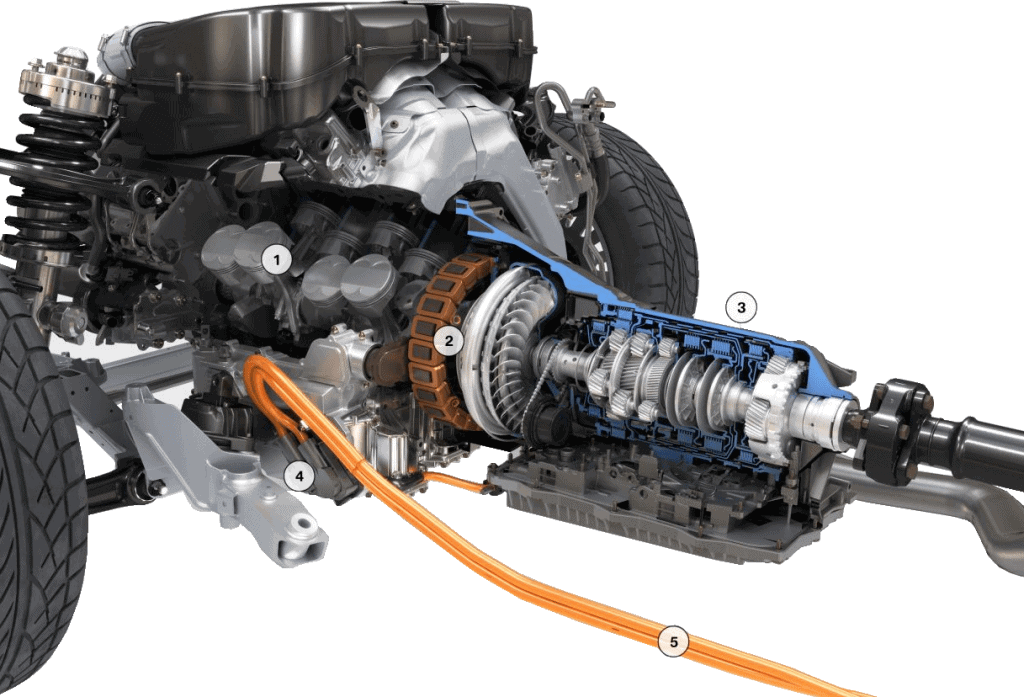
Täyssähköauton sähkömoottori on usein asennettu taka-akselille. Alla olevassa kuvassa näkyy sähkömoottori, jossa invertteri on sylinterimäisessä kotelossa ja Teslan loppukäyttö.

AC-sähkömoottori (synkroninen, kestomagneeteilla):
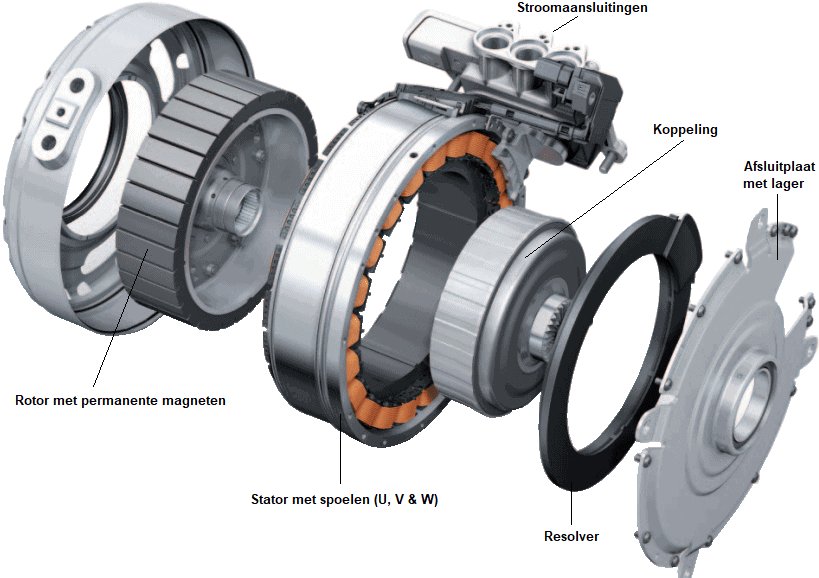
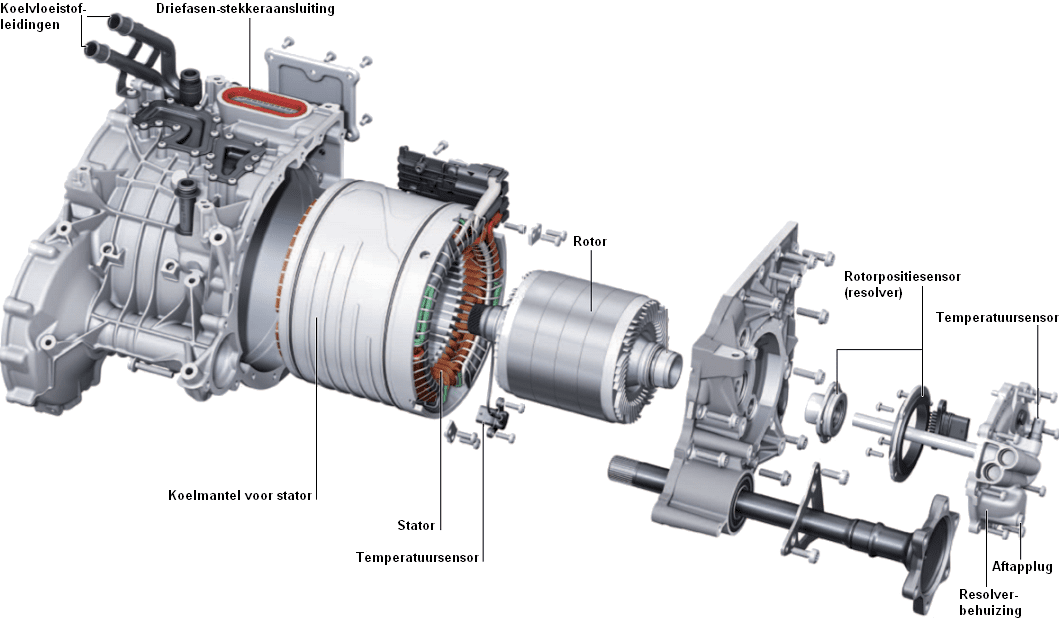
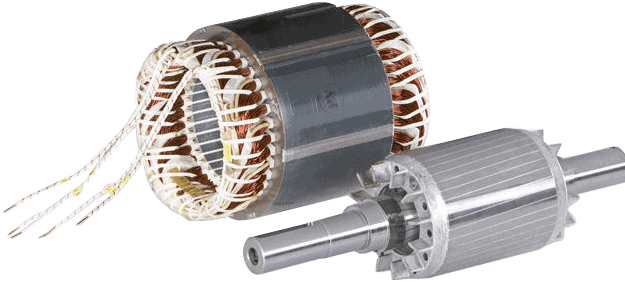
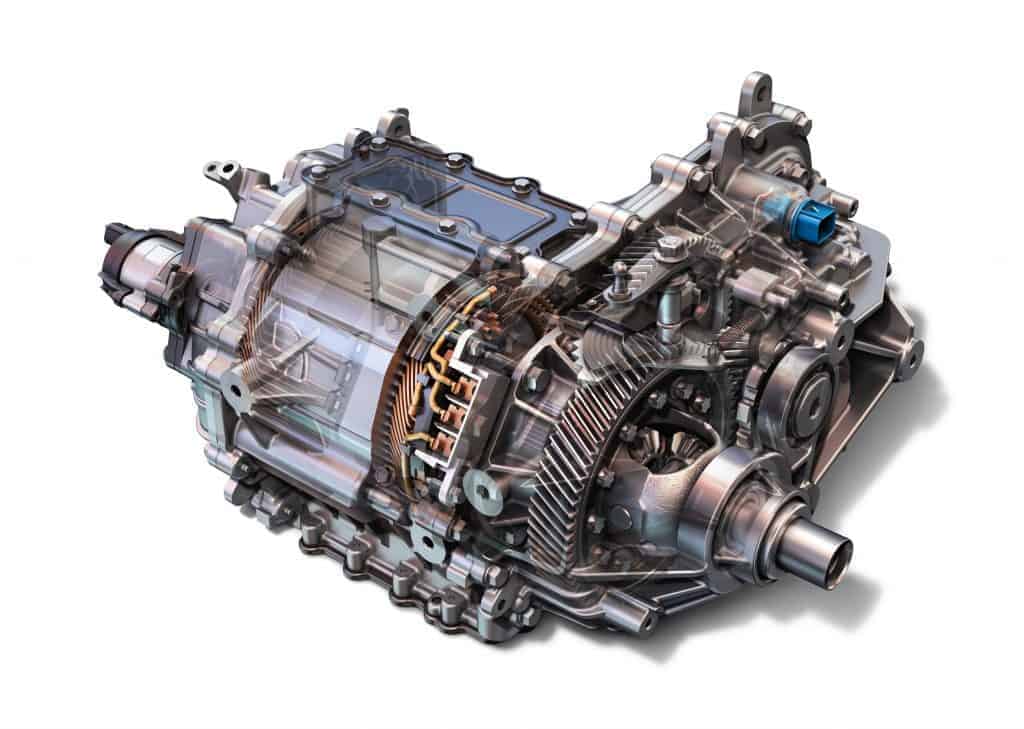
Seuraava kuva näyttää Audin (synkronisen) sähkömoottorin osat. Tätä tyyppiä käytetään A6:n ja A8:n hybridiversioissa. Listaamme lyhyesti komponentit. Nämä komponentit kuvataan yksityiskohtaisesti seuraavissa kappaleissa.
Kestomagneeteilla varustettu roottori alkaa pyöriä staattorin magneettikentän muutoksen seurauksena. Roottori on kytketty kytkimeen, joka voi kytkeä tai irrottaa polttomoottorin ja sähkömoottorin (kytkimen (ei kuvassa) yhteydessä) eri käyttöolosuhteissa. Roottorin asento määräytyy resolveri mitattu: nämä tiedot ovat tärkeitä IGBT-ajureille, jotta he voivat ohjata staattorin keloja oikeaan aikaan.
Kestomagneeteilla varustettua sähkömoottoria voidaan ohjata sekä DC:llä (tasajännite) että AC:lla (vaihtojännite).
Synkroninen moottori on yksi yleisimmin käytetyistä sähkömoottoreista hybridi- tai täyssähköautoissa. Tämäntyyppinen sähkömoottori koostuu staattorista, jossa on käämit, ja roottorista, jossa on useita kestomagneetteja. Roottori pyörii samalla nopeudella kuin staattorin magneettikenttä. Synkronista moottoria voidaan ohjata seuraavasti:
- AC: ohjataan sinimuotoisella signaalilla (vaihtovirta).
- DC: ohjataan neliömäisellä tai puolisuunnikkaan muotoisella signaalilla (tasavirta)
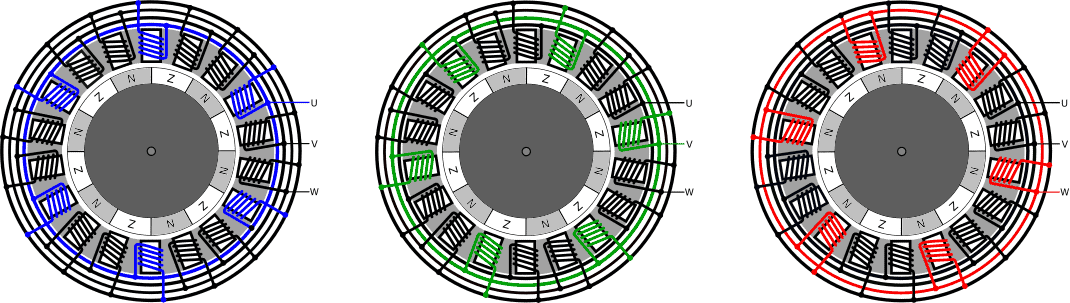
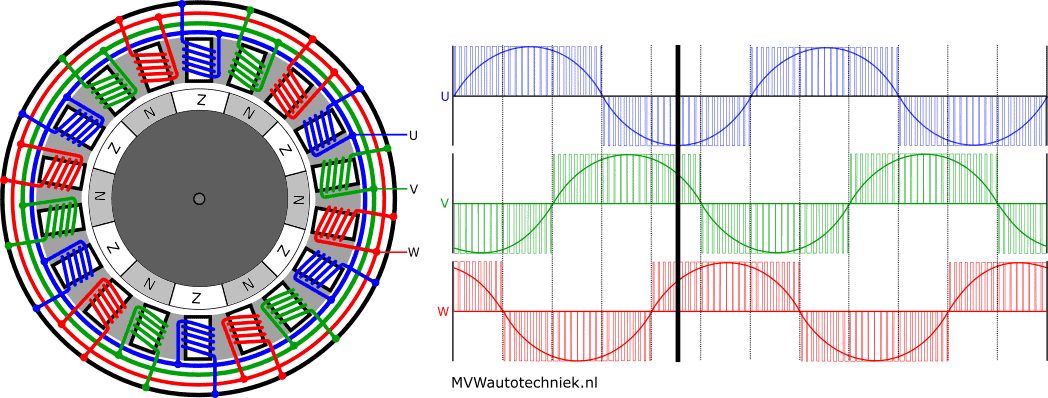
Synkronisen moottorin staattori koostuu kolmesta staattorin käämiryhmästä: U, V ja W. Jokainen ryhmä sisältää kolme sarjaa kuusi käämiä, jotka on kytketty rinnakkain ja jotka on jaettu staattorin koko kehälle. Joka kolmas kela kuuluu samaan sarjaan.
- U-kelat: sininen
- V-kelat: vihreä
- W kelat: punainen
Roottori sisältää useita kestomagneetteja. Aktivoimalla vuorotellen keloja staattorissa syntyy pyörivä magneettikenttä. Roottori seuraa pyörivää kenttää ja pyörii siten.
Synkronisen moottorin AC-ohjaus:
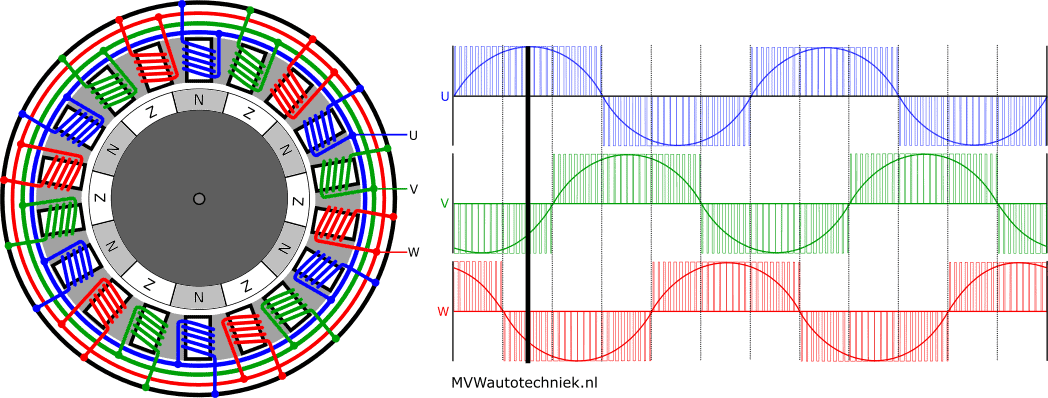
AC-ohjaus käyttää taajuusohjattua ohjausta tai sinimuotoista kommutointia. Staattorin keloihin syötetään vaihtuva kolmivaiheinen siniaaltojännite roottorin pyörittämiseksi.
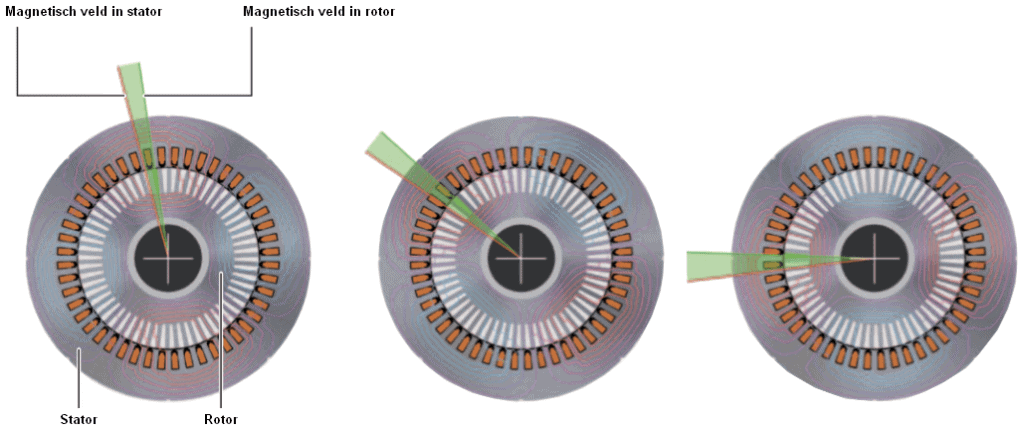
Alla oleva kuva näyttää roottorin asennon maksimiherätetyllä U-kelalla. Magneettikentän seurauksena pohjoisnavat ovat asettuneet suoraan jännitteisiä U-keloja vastapäätä. Sähkömoottorin vieressä oleva osoitin osoittaa kelojen ohjauksen sillä hetkellä.
Tiedoksi: Selityksen roottori pyörii ohjattaessa staattorin keloja myötäpäivään.
Seuraavassa kuvassa siniaalto eli U-käämin läpi kulkeva vaihtovirta on maksimi negatiivinen. Tämän ohjauksen aikana roottorin etelänavat ovat suoraan jännitteisiä (U) staattorikäämejä vastapäätä.
Roottorin pohjois- ja etelänavan välillä on itse asiassa pieni ilmarako. Vaihdon aikana etelästä pohjoisnavalle virran suunta U-kelassa muuttuu. Edelleen:
- V-käämin (vihreä) läpi kulkeva virta on lähes maksimipositiivinen; pohjoisnapa on myös melkein vastapäätä kelaa.
- W-kelan läpi kulkeva virta on ollut maksimaalinen negatiivinen ja kasvaa. Etelänapa on kiertynyt kelan ohi.
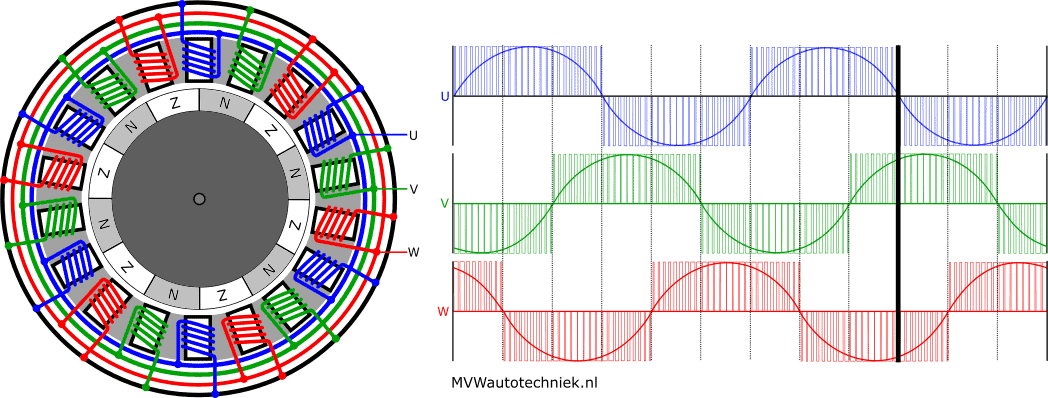
Alla oleva animaatio näyttää vaihtovirrasta johtuvan roottorin pyörimisen, jotta saat kuvan siitä, miten virta kulkee.
AC-sähkömoottori (asynkroninen, oravahäkkimoottori):
Oravahäkki tai oikosulkuankkurin sähkömoottori on asynkroninen moottori. Kestomagneeteilla varustetun synkronisen moottorin ja asynkronisen moottorin ero on roottorissa: tämä on pehmeä rautarumpu, jossa on johtimet pituussuunnassa. Roottori pyörii asynkronisesti staattorin kanssa, mikä tarkoittaa, että roottorin ja staattorin magneettisen nopeuden välillä on nopeusero. Staattori on täsmälleen sama.
Asynkronisen sähkömoottorin roottori koostuu oikosuljetuista keloista; U-, V- ja W-kelat on kytketty toisiinsa toiselta puolelta. Kun roottori on staattorin pyörimiskentässä, roottorin keloihin syntyy induktiojännite. Koska roottorin kelat ovat oikosulussa keskenään, niiden läpi kulkee virta. Tämä virta saa roottorin luomaan magneettikentän, joka luo vääntömomentin. Koska asynkronisen sähkömoottorin toiminta perustuu induktiolakiin, kutsumme sitä myös oikosulkumoottoriksi.
Toimitettu vääntömomentti vaikuttaa staattorin pyörivän magneettikentän ja roottorin nopeuden väliseen luistoon.
Asynkronisella moottorilla on useita etuja ja haittoja synkroniseen moottoriin verrattuna.
Edut:
- suhteellisen yksinkertainen, kestävä ja edullinen roottori;
- suuri vääntömomentti alhaisella nopeudella.
miinukset:
- pienempi tehotiheys (massaa kohden) ja hyötysuhde (hyötysuhde). Oikosuljettujen roottorikäämien virrat aiheuttavat ylimääräisiä roottorihäviöitä;
- nopeutta ei voida ohjata tarkasti, koska se riippuu kuormasta. Tämän ei sinänsä tarvitse olla haitta: hyvällä ohjausjärjestelmällä voidaan säätää myös asynkronisen moottorin nopeutta;
- korkea käynnistysvirta.
Asynkronisen moottorin roottorin asentoa ja nopeutta mitataan a roottorin asentotunnistin. Hall-anturit tarjoavat usein vähintään neljä pulssia roottorin kierrosta kohti välittämään roottorin asennon ja nopeuden. Emme kutsu tämän tyyppistä roottorin asentoanturia resolveriksi, kuten synkronisen moottorin tapauksessa.
Toisin kuin synkronisessa moottorissa, roottorin asentotunnistimen ei tarvitse tietää roottorin asentoa pysähdyksissä. Roottorin asento on tärkeä pyörimisen aikana: on huolehdittava siitä, että magneettisen pyörimiskentän ja roottorin välinen luisto ei kasva liian suureksi. Kun pyörivä kenttä liikkuu liian nopeasti, voi syntyä tilanne, jossa roottori haluaa yhtäkkiä kääntyä toiseen suuntaan. Syntyvät voimat voivat olla tuhoisia mekaanisille ja sähköisille komponenteille.
Jotkut valmistajat valitsevat myös asynkronisen moottorin resolveri soveltamalla. Syy on minulle tuntematon. Joka tapauksessa resolveri on äärimmäisen tarkka sekä paikallaan seistessä että juostessa, mikä saattaa hyötyä tarkasta ohjauksesta.
Synkronisen ja asynkronisen sähkömoottorin tehokkuuskartta:
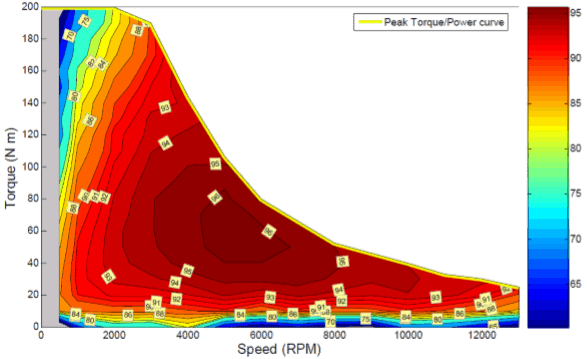
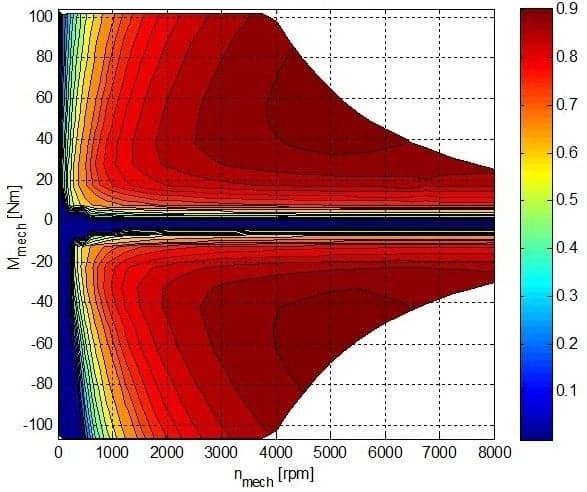
Alla olevissa kuvissa näkyy synkronisen sähkömoottorin (vasemmalla) ja asynkronisen sähkömoottorin (oikealla) tehokkuus.
- Synkroninen sähkömoottori on erittäin tehokas. Tehokkuus on yli 90 % suurella alueella, huippuarvojen ollessa jopa 96 %. 2000 rpm alkaen kenttä heikkenee, mikä aiheuttaa maksimivääntömomentin pienenemisen.
- Asynkronisella moottorilla on huomattavasti alhaisempi hyötysuhde kuin synkronisella moottorilla pienemmillä nopeuksilla.
Aiheeseen liittyvät sivut: