Aiheet:
- ESP yleinen
- Muut nimet ESP:lle
- Aliohjattu
- Poissa tolaltaan
- Ohjauskulman anturi
- Poikittainen kiihtyvyysanturi (G-anturi)
- Kääntömomentin anturi (Kääntymisanturi)
- Jarrupaineanturi
ESP yleinen:
ESP on lyhenne sanoista Electronic Stability Program ja toimii yhdessä ABS:n ja ASR:n kanssa. Jos autossa on ABS (Anti-lock Braking System) ja ASR/ASC (Anti-Slip Regulation / Control), ESP-järjestelmä voidaan lisätä useiden lisäanturien ja ohjelmistosäädön avulla. ESP-järjestelmässä käytetään myös komponentteja, kuten pyörien nopeusantureita ja ABS-pumppua / ohjausyksikköä. ESP-järjestelmä säätelee myös moottorin tehon alenemista; sulkemalla kaasua enemmän tai katkaisemalla sytytysvirta.
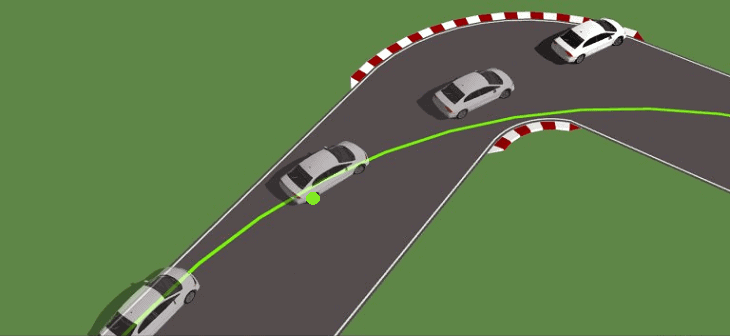
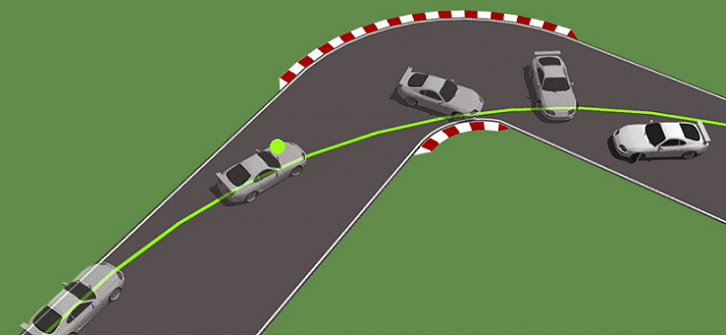
ESP-järjestelmän tarkoituksena on parantaa kaarreajokäyttäytymistä (ali- ja yliohjautuvuus). Tämä koskee muun muassa tilanteita, joissa jarrutus tehdään mutkassa tai kun tapahtuu väistöliike. ESP-järjestelmä jarruttaa ajoneuvon yhtä pyörää, jolloin ohjausominaisuudet palautuvat normaaliksi. Alla on kaksi tilannetta, joissa vihreällä merkittyä pyörää jarrutetaan. Jarruttamalla ajoneuvo seuraa vihreää linjaa sen sijaan, että se riistäytyisi hallinnasta. Eri tarvittavat ESP-komponentit on kuvattu tämän sivun alaosassa.
Muut ESP:n nimet:
Autonvalmistajat käyttävät usein omia nimiään ESP:lle malleissaan, vaikka toiminta on sama. Nämä muut nimet on annettu, jotta järjestelmä näyttäisi "ylellisemmältä" kuin tavallinen ESP. Esimerkkejä tästä ovat:
- ASC + T: Automaattinen ajonvakautus ja luistonesto (vanhan sukupolven BMW ennen vuotta 1996)
- DSC: Dynaaminen ajonvakautusohjelma: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: Dynaaminen ajonvakautus- ja luistonesto (Volvo)
- ESP: Elektroninen ajonvakautusjärjestelmä (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagen
- PSM: Porsche Stability Management (Porsche)
- VDC: Vehicle Dynamic Control (Alfa Romeo)
- VDCS: Vehicle Dynamic Control System (Subaru)
- VSC: ajoneuvon ajonvakautusjärjestelmä (Lexus, Toyota)
- VSA: Vehicle Stability Assist (Honda)
Aliohjattu:
Aliohjautuvuus tapahtuu, kun eturenkaiden pito ei enää ole riittävä tienpintaan. Auto tekee suunniteltua kevyemmän käännöksen, joten sillä on suurempi taipumus ajaa suoraan. Tästä syystä etupyörät liukuvat mutkan ulkopuolelle. Aliohjautuvuus voidaan eliminoida, jotta etupyörillä saadaan jälleen riittävä pito tienpintaan. Tämän saavuttamiseksi voit käyttää vähemmän kaasua tai ohjata vähemmän. Enemmänkin ohjattavuus ei auta aliohjautumiseen, se voi jopa pahentaa sitä, koska pyörien pito vain vähenee. Useimmat autonvalmistajat säätävät alustaa siten, että autolla on taipumus ali- kuin yliohjautumiseen. Syynä on se, että keskivertokuljettaja päästää välittömästi kaasua tällaisessa tilanteessa (mikä voi olla se ratkaisu, joka antaa autolle otteen uudelleen).
Poissa tolaltaan:
Yliohjautuvuus tapahtuu, kun takarenkaat eivät enää tartu tien pintaan. Auton takarenkaat liukuvat kohti mutkan ulkopuolta. Takaosa haluaa sitten ohittaa etuosan, jolloin ajoneuvo pyörii akselinsa ympäri. Yliohjautuvuutta voidaan korjata takavetoisissa autoissa (esim. BMW) vasta-ohjauksella ja hidastumalla ja etuvetoisissa autoissa (esim. Volkswagen) hieman enemmän kaasua. Usein, varsinkin moottoriurheilussa, käytetään tietoisesti yliohjausta, jotta mutkayhdistelmän läpi ajetaan helpommin ja nopeammin. Äärimmäisessä tapauksessa tällaista järkytyksen muotoa kutsutaan "ajautumiseksi". Yliohjautuminen on yleensä vaarallisempaa kuin aliohjautuminen, koska useimmat kuljettajat eivät todennäköisesti pysty korjaamaan sitä. Siksi autoa suunniteltaessa alustaa säädetään enemmän "aliohjautuvuuden" suuntaan, koska se on helpompi korjata.
Ohjauskulman anturi:
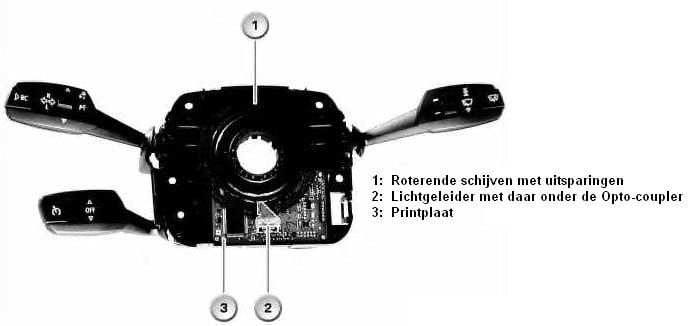
Ohjauskulma-anturi on asennettu ohjauspylvääseen. Tämä voi olla lähellä ohjaustankoa, mutta myös sisäpuolella suuntavilkkujen/pyyhkimien vipujen välissä, kuten oikealla olevassa kuvassa näkyy. Nämä ovat BMW:n ohjauspylvään kytkimet.
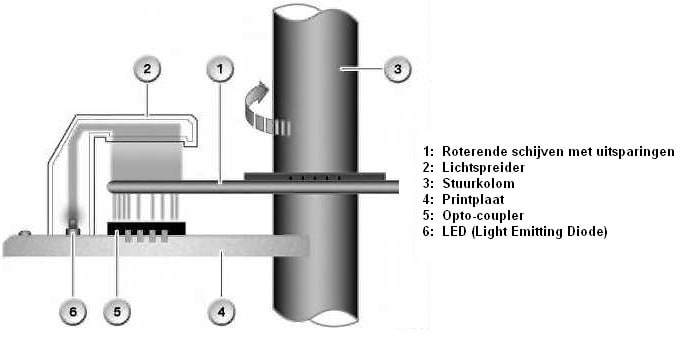
Ohjauskulmaanturin tehtävänä on mitata ohjauspyörän kiertokulma. Tämä anturi käyttää yhtä tai useampaa optokytkintä, joka mittaa pyörivien levyjen valonläpäisyä. Valovälit ovat erilaisia pyörivän levyn jokaisessa kohdassa, mikä mahdollistaa ohjauspyörän tarkan asennon tunnistamisen. Kaikki levyjen syvennykset luovat epäsymmetrisen neliömäisen signaalin. Optokytkin voi muuntaa valosignaalin jännitteeksi, joka välitetään sitten ohjausyksikköön.
Poikittainen kiihtyvyysanturi (G-anturi):
Sivukiihtyvyysanturi (kutsutaan myös G-voimien G-anturiksi) on sijoitettu mahdollisimman paljon auton keskelle. Kuljetettaessa liikkuva levy (katso kuva alla, numero 2) siirtyy kondensaattoreiden (1) välillä. Kondensaattorien jännite on 5 volttia. Kun levy on keskellä (eli auton ajettaessa suoraan) molempien kondensaattoreiden jännite on 2,5 volttia. Kun auto tekee käännöksen (vasemman kuvan tapauksessa), levy siirtyy toiselle puolelle keskipakovoiman ja keskipakovoiman vaikutuksesta.
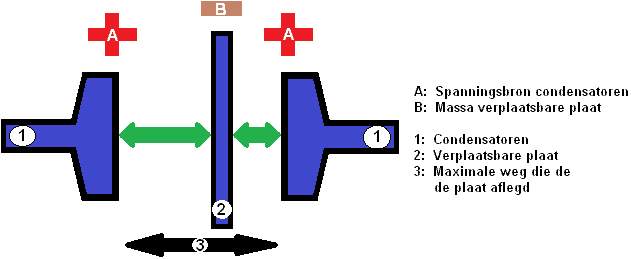
Kun levy siirtyy, oikean kondensaattorin kapasitanssi laskee. Tämä ei nyt ole 2,5 volttia, vaan esimerkiksi 1,5 V. ESP-ohjausyksikkö tunnistaa kahden kondensaattorin välisen eron ja voi sen perusteella määrittää, kuinka suuri keskipakovoima tai keskipakovoima on (eli kuinka jyrkkä mutka on tehty. Näin voidaan selvittää, onko auto esim. yliohjattu) . Tämän sivukiihtyvyysanturin arvoja käytetään pyörän nopeusantureiden tietojen vertailuun ja sen määrittämiseen, pitäisikö ESP-järjestelmän puuttua asiaan.
Kääntömomentin anturi (Kääntymisanturi):
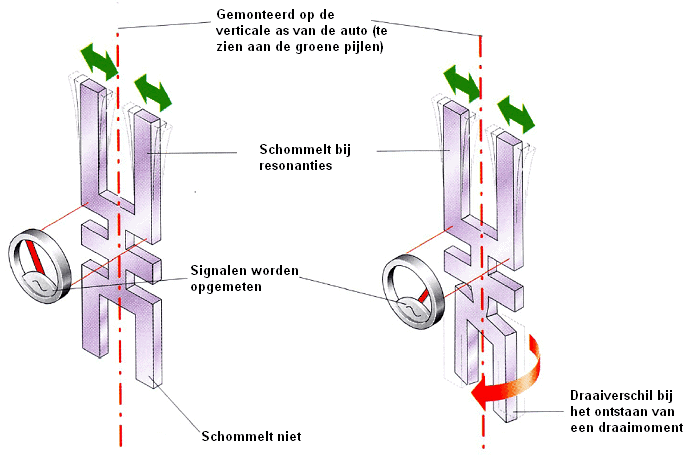
Kääntömomentin anturi, jota kutsutaan myös englanniksi "Yaw sensor", on sijoitettu mahdollisimman paljon auton keskelle yhdessä sivukiihtyvyysanturin kanssa. Anturi antaa ESP-järjestelmän tarvitsemat tiedot. Kääntömomentin anturi rekisteröi ajoneuvon taipumuksen pyöriä pystyakselin ympäri. Tämän mittauksen arvoa kutsutaan pyörimisnopeudeksi ja se näytetään asteina sekunnissa.
Anturi koostuu kahdesta äänihaarukasta. Ylempi äänihaarukka saa värisemään (resonanssin) taajuudella 11000 Hz (11kHz) vaihtojännitteellä ja pyörii, kun ajoneuvo ajaa mutkan läpi. Mitä terävämpi mutka, sitä enemmän alempi äänihaarukka on vääntynyt suhteessa ylempään haarukkaan. Periaate perustuu gyroskooppisiin voimiin (Coriolis-voima). Kun pyörivä osa siirretään pois asennosta vääntövoimalla, syntyy gyroskooppisia voimia. Tästä johtuu nimi kääntömomentin anturi.
Vääntövoimasta johtuen pietsoelementti synnyttää jännite-eron, jonka ohjauslaite mittaa. Syntynyt jännite vaihtelee välillä 0 ja 5 volttia. Lepoasennossa (kun pyörimistä ei ole rekisteröity) anturi lähettää 2,5 volttia.
Jarrupaineanturi:
Jarrujärjestelmään on lisätty myös erilliset hydraulipaineanturit (molemmat piirit), jotka näkyvät alla olevissa kuvissa. Vanhemmissa autoissa nämä anturit sijaitsevat jarrulinjoissa. Nykyään jarrupaineanturit on yleensä rakennettu itse ABS-järjestelmän hydrauliyksikköön. Tämä laite on usein näkyvissä konepellin alla. Kaikki hydrauliset jarruletkut on kytketty tähän.

