فاعل، موضوع:
- درجات آزادی در هدایت چرخ
- لولا در راهنمای چرخ
- راهنماها در راهنمای چرخ
- درجات آزادی را محاسبه کنید
درجات آزادی در هدایت چرخ:
سیستم تعلیق خودرو شامل تعدادی لولا (از جمله روی جناغ ها و کمک فنر) است که درجات آزادی را در کل سیستم تعلیق فراهم می کند. هدایت چرخ تضمین می کند که درجات آزادی احتمالی حرکات احتمالی چرخ فقط به یک یا دو محدود می شود. اگر یک چرخ «ثابت» نباشد، میتواند آزادانه بچرخد، بچرخد (در جهتهای x و y)، بچرخد، بالا و پایین برود. سپس چرخ در اصل از سیستم تعلیق "شل" می شود. می تواند در هر جهتی بدون "راهنما" حرکت کند. هر حرکتی که ذکر شد یک درجه آزادی است.
سیستم تعلیق چرخ، یعنی هدایت چرخ، تضمین می کند که آزادی حرکت به 1 درجه آزادی محدود می شود. این بدان معنی است که چرخ می تواند "آزادانه" تنها در 1 جهت حرکت کند، بدون تاثیر راننده. این حرکت آزاد، حرکت بالا و پایین فشرده سازی و بازگشت است. چرخ می تواند بدون هیچ مانعی روی سطح جاده ناهموار به داخل و خارج بپرد.
سیستم تعلیق چرخ یک ماشین با تعدادی لولا خطی، اتصالات توپی و لولاهای چرخشی کشویی ساخته شده است. این لولاها همگی بر یکدیگر تأثیر می گذارند. یک لولا بیش از حد درجات آزادی زیادی ایجاد می کند (بنابراین چرخ می تواند ناخواسته در جهات مختلف حرکت کند) یا 0 درجه آزادی (چرخ نمی تواند حرکت کند و بنابراین نمی تواند فشرده و فشرده شود).
لولا در راهنمای چرخ:
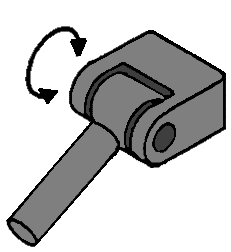
لولای خط:
این لولا خط می تواند در 1 جهت حرکت کند. بالا و پایین. این 1 درجه آزادی را فراهم می کند.
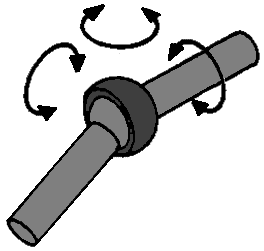
مفصل توپ:
با این لولا قطعات مربوطه می توانند 3 حرکت نسبت به یکدیگر انجام دهند. حرکت سر تکان دادن، غلت زدن و چرخش. این لولا دارای 3 درجه آزادی است، زیرا زمانی که لولا "شل" باشد، می تواند 3 حرکت آزاد انجام دهد (به فلش ها مراجعه کنید).
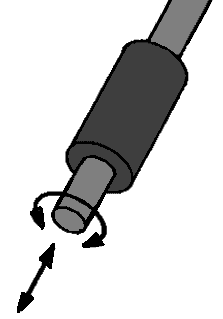
لولای کشویی چرخشی:
این لولا می تواند 2 حرکت انجام دهد. یک حرکت چرخشی و یک حرکت کشویی داخل و خارج. در اصل این نمونه ای از کمک فنر (از بند مک فرسون) است. این 2 حرکت تضمین می کند که لولای کشویی دوار دارای 2 درجه آزادی است.
راهنماها در راهنمای چرخ:
برای ایجاد یک سیستم تعلیق چرخ از انواع مختلف لولا، گاهی اوقات باید لولاها را روی یک شیء ترکیب کرد، مثلاً یک استخوان جناغی. سپس این بازوی حمایتی را راهنما می نامیم. در زیر چند نمونه از این هادی ها آورده شده است:
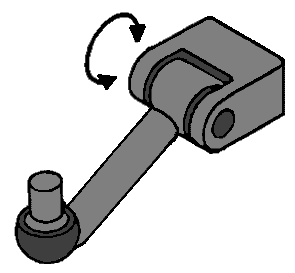
لولای خطی با مفصل توپی:
این یک نمونه معمولی از یک استخوان جناغی است که در سمت لولای خط به بدنه (یا زیرفریم) وصل می شود و به بند فرمان در سمت مفصل توپ متصل می شود. هنگامی که کل این لولا شل است، می تواند در هر دو جهت حرکت لولای خط (1 جهت) و 3 جهت اتصال توپ حرکت کند. به هر حال، لولا خط دارای 1 درجه آزادی و مفصل توپ دارای 3 است. چون این قسمت به عنوان 1 هادی دیده می شود، می توان درجات آزادی را با هم جمع کرد. 1 و 3 سپس آن را 4 درجه آزادی می کنند.
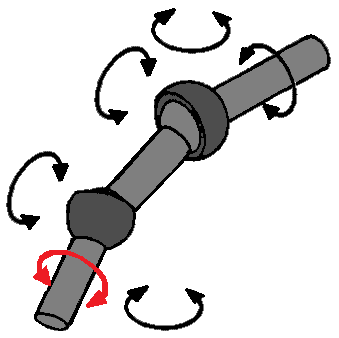
مفصل توپ دوتایی:
نمونه ای از راهنما با اتصال توپی دوتایی میله اتصال با توپ های میله داخلی و خارجی است. هر مفصل توپ 3 درجه آزادی دارد، بنابراین از آنجایی که 1 هادی است، باید اینها را با هم جمع کرد. با این حال، آنها همان چرخش خود را دارند، زیرا اگر 1 مفصل توپ حرکت چرخشی انجام دهد، دیگری نیز حرکت می کند. بنابراین 1 درجه آزادی چرخش خود حساب نمی شود (فلش های قرمز را ببینید). درجات آزادی برای این هادی در مجموع 6 است، اما در محاسبه زیر عدد 1 را در قسمت "خود چرخش r" وارد کنید. سپس این 1 در محاسبه کم می شود.
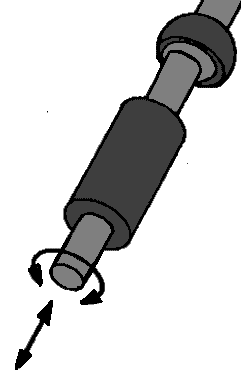
لولای کشویی چرخشی با مفصل توپی:
همانطور که قبلا ذکر شد، کمک فنر یک لولای کشویی چرخشی است. با این حال، هر رکاب مک فرسون دارای یک مفصل توپی در بالای آن است، حتی اگر در ابتدا چنین فکری نمیکنید. لاستیک دیگری در بالای کمک فنر وجود دارد. این لاستیک مقداری آزادی حرکت را برای کمک فنر فراهم می کند و به همین دلیل دارای ویژگی اتصال توپی نیز می باشد. بنابراین یک ضربه گیر دارای 2 درجه آزادی لولای چرخشی و 3 درجه آزادی مفصل توپ است که با هم 5 را می سازد. در اینجا نیز یک چرخش طبیعی وجود دارد، زیرا حرکت چرخشی لولای کشویی چرخشی همان حرکت چرخشی مفصل توپ است. بنابراین 1 باید به "r" چرخش خود اضافه شود.
محاسبه درجه آزادی:
تعداد درجات آزادی را می توان بر اساس داده های تعلیق محاسبه کرد. برای تکمیل صحیح فرمول، لولاها و راهنماها باید به دسته های زیر تقسیم شوند:
- L برای تعداد هادی ها
- g برای تعداد مفاصل و لولاها
- r برای تعداد چرخش های طبیعی (مانند اتصال توپی دوگانه در 1 راهنما)
علاوه بر این نامه ها:
- k برای تعداد حامل های چرخ (در بیشتر موارد 1، زیرا این بند انگشت فرمان است)
- εfi برای تعداد درجات آزادی برای مجموع تعداد مفاصل و لولاها با هم جمع شده اند.
F = 6 (k + L – g) -r + εfi
مثال:
تعلیق چرخ شامل: k 1 چرخ حامل (بند انگشت)، L 2 راهنما، g 5 مفصل، r 2 خود چرخش، εfi 15 درجه آزادی کل
در فرمول این است:
F = 6 (1 + 2 - 5) - 2 + 15
F = 6 x (-2) - 2 + 15
F=1
بنابراین اکنون 1 درجه آزادی وجود دارد، بنابراین این خوب است. چرخ می تواند یک حرکت خالص به بالا و پایین انجام دهد.
برای روشن شدن این موضوع، در اینجا یک مثال با تصویری از سیستم تعلیق چرخ آورده شده است:
تصویر زیر مربوط به یک بند مک فرسون با افسانه مربوطه است. حروف A، B و C نشان دهنده راهنماها و اعداد 1 تا 6 نشان دهنده لولا / مفاصل هستند.
εfi درجات آزادی لولاها با هم هستند. بنابراین 3 درجه آزادی در هر مفصل توپ (بنابراین 4 x 3)، 1 درجه آزادی لولا خط و 2 درجه آزادی لولا کشویی دوار.
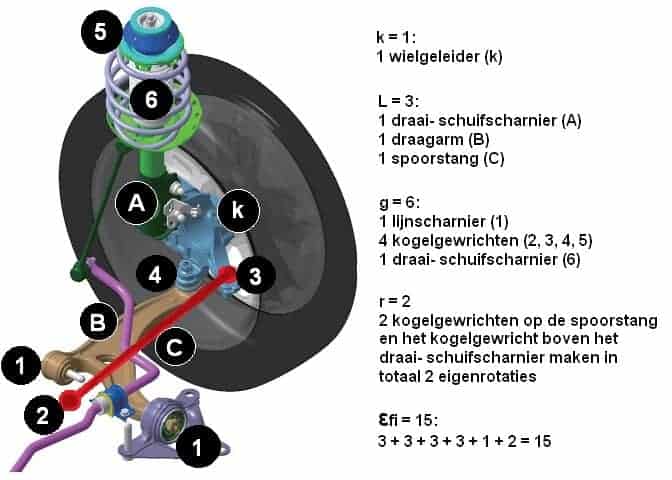
فرمول را می توان با این کامل کرد:
F = 6 (k + L – g) -r + εfi
F = 6 (1 + 3 - 6) - 2 + 15
F = 6 x (-2) - 2 + 15
F = -12 - 2 + 15
F = -14 + 15
F= 1 درجه آزادی