فاعل، موضوع:
- تکنولوژی کنترل
- کنترل فرآیند بر اساس شرایط عملیاتی
تکنولوژی کنترل:
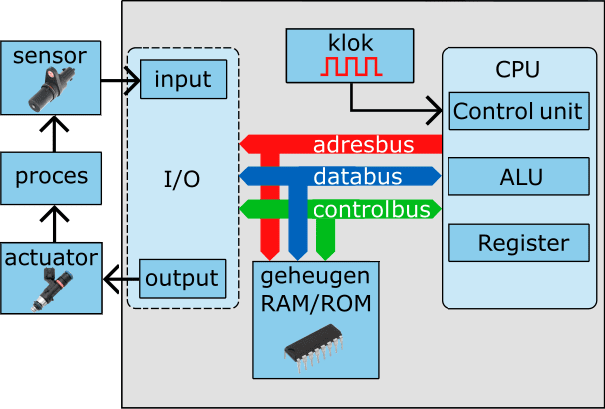
ECU فرآیندها را اندازه گیری، کنترل و تنظیم می کند. ECU اطلاعات را از حسگرها دریافت می کند. یک حسگر تغییر در یک کمیت فیزیکی را به سیگنال الکتریکی تبدیل می کند. این اطلاعات سنسور از طریق ورودی وارد ECU می شود. سیگنال های ورودی احتمالی از:
- حسگر سرعت؛
- حسگر دما؛
- سنسور بار (فشار منفی)؛
- سنسور اکسیژن
اطلاعاتی که وارد می شود لزوماً مستقیماً به یک عمل منتهی نمی شود. تنها زمانی که مقدار اندازه گیری شده از مقدار مورد نظر منحرف شود، می توان کنترل محرک را تنظیم کرد. ECU سپس یک عملکرد "تنظیم" دارد. بله/خیر تصمیمات با استفاده از برنامه کامپیوتری از پیش برنامه ریزی شده (ROM / Flash memory) گرفته می شود.
اندازه گرفتن: سنسور، در این مورد یک سنسور، یک کمیت فیزیکی را اندازه گیری می کند و آن را به یک سیگنال الکتریکی تبدیل می کند. این مقدار اندازه گیری شده (X) به کنترل کننده ارسال می شود. ارزش اندازه گیری شده لزوماً نباید مستقیماً به یک عمل منتهی شود. به دمای ثابت فکر کنید

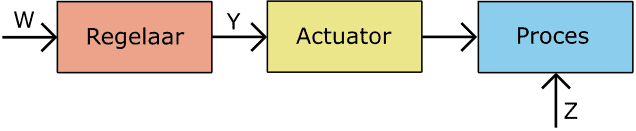
برای هدایت: کنترلر (ECU) یک محرک را کنترل می کند. هیچ بازخوردی از سنسور وجود ندارد، بنابراین ECU دنباله فرآیند را دنبال نمی کند. بنابراین یک خطا در فرآیند همیشه تشخیص داده نمی شود. یک نمونه از کنترل، کارکردن دستی بوق (W) است. ECU بوق (Y) را هنگام کار با سوئیچ کنترل می کند. هیچ عملکرد کنترلی روی بوق وجود ندارد، بنابراین خطاهای (Z) شناسایی نمی شوند.
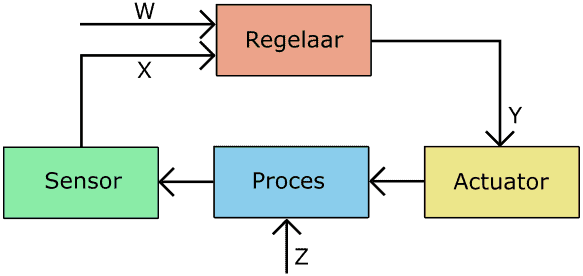
برای هماهنگی: کنترل کننده می تواند یک فرمان دستی (W) یا یک مقدار سنسور اندازه گیری شده (X) را در یک کنترل محرک پردازش کند. محرک باعث تغییر در فرآیند می شود. به عنوان مثال، مدت تزریق را در نظر بگیرید. تزریق بیشتر به معنای مخلوط غنی تر است. میزان اکسیژن توسط حسگر لامبدا اندازه گیری می شود و این مقدار اندازه گیری شده (X) را به کنترل کننده منتقل می کند. هنگامی که یک خطای پیش بینی نشده وجود دارد (مثلاً انسداد در انژکتور)، این باعث تغییر (Z) در فرآیند می شود. این انحراف نیز توسط سنسور اندازه گیری می شود، به طوری که کنترل کننده می تواند فرآیند را با استفاده از کنترل محرک تنظیم کند.
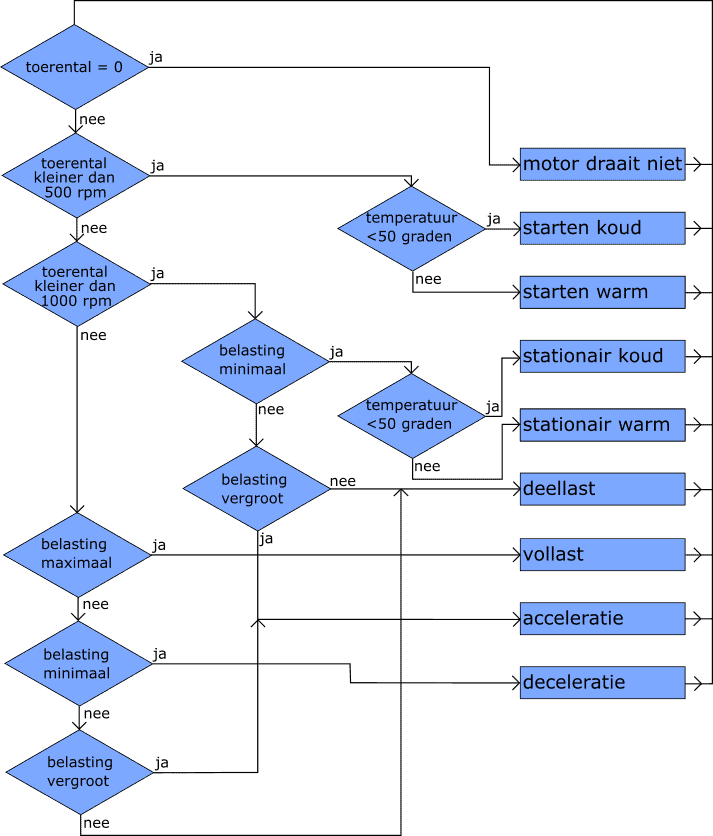
کنترل فرآیند بر اساس شرایط عملیاتی:
سیستم مدیریت موتور یک موتور احتراقی باید مخلوط را در تمام شرایط کاری به طور بهینه بسوزاند. تعیین ترکیب مخلوط و زمان احتراق برای تضمین ترکیب گازهای خروجی (انتشار)، صرفه جویی و دستیابی به توان مورد نظر بسیار مهم است.
هر شرایط عملیاتی دارای فناوری کنترل خاص خود است:
- شروع سرد: مخلوط غنی است و اشتعال دیر است.
- شروع گرم: مخلوط کمتر از شروع سرد است.
- بیکاری سرد: مخلوط غنی است و سرعت بیکاری افزایش یافته است.
- بیکاری داغ: مخلوط در سرعت دور آرام کمتر غنی است.
- بار بخشی: استوکیومتری مخلوط، محدوده سرعت بین 1500 تا 4000 دور در دقیقه، زمان احتراق از پیش تعریف شده است، کنترل لامبدا فعال است.
- بار کامل: مخلوط غنی شده است، بار و سرعت بالا است.
- شتاب: مخلوط غنی، اشتعال دیر.
- کاهش سرعت: مخلوط کم چرب، زود اشتعال.