فاعل، موضوع:
- مقدمه
- منطق ترانزیستور ترانزیستور (TTL)
- تبدیل ولتاژ سنسور آنالوگ به پیام دیجیتال
- تبدیل سیگنال مولد پالس به پیام دیجیتال
- سیگنال های خروجی
معرفی:
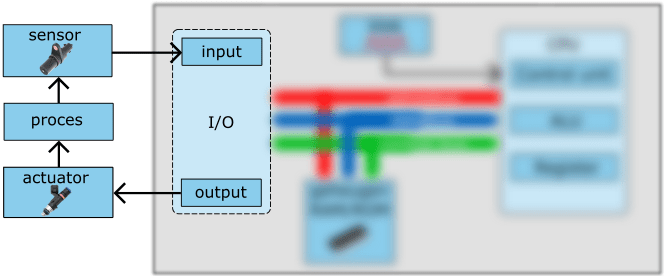
در بیشتر موارد، سیگنال های الکتریکی از سنسورها باید قبل از ارائه به پردازنده تنظیم شوند. عملگرها در سمت دیگر کامپیوتر کنترل می شوند. اینها اغلب مدارهای القایی هستند که اغلب جریان های بزرگ را تغییر می دهند. سخت افزار تنظیم سیگنال های حسگر و جریان های محرک را مدارهای رابط می نامند. یک مدار رابط، ترجمه ولتاژ آنالوگ به دیجیتال را تضمین می کند.
- سنسور انتقال ولتاژ با جریان کم مدار رابط ولتاژ را به مقدار دیجیتال (0 یا 1) تبدیل می کند.
شدت جریان با سیگنال سنسور کم است. - عملگرها نیاز به جریان بالاتر
ام د محرک های کنترلی، در ECU به صورت (ترکیبی از) ترانزیستور یا FET قرار دارند که به آنها "درایور" نیز می گویند. در بخش "سیگنال های خروجی" در این مورد با جزئیات بیشتری صحبت خواهیم کرد.
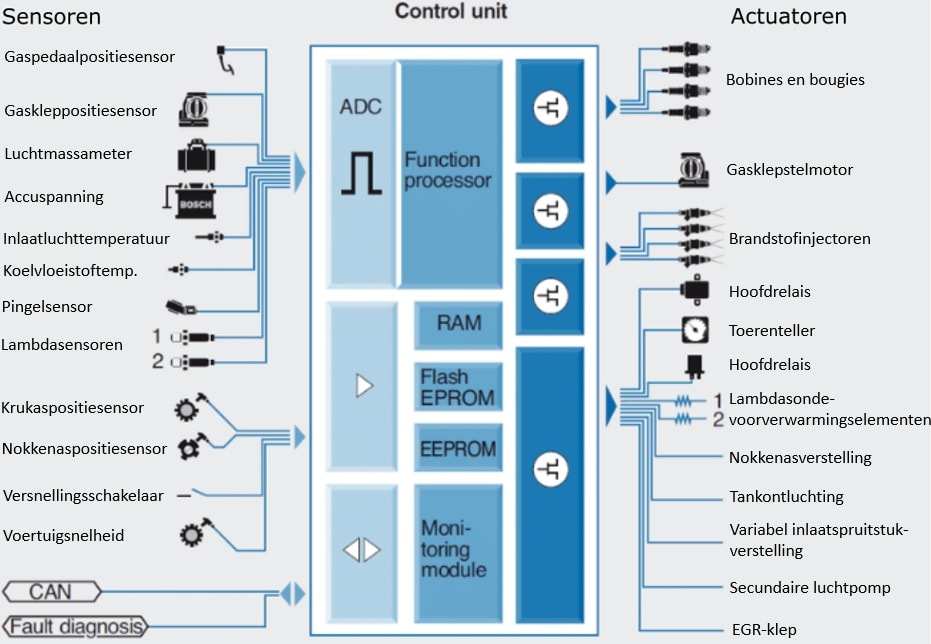
تصویر زیر سنسورها و محرک های یک سیستم مدیریت موتور (بنزینی) را نشان می دهد. گروه برتر سنسورها (از سنسور موقعیت پدال گاز گرفته تا سنسورهای لامبدا) در دسته "آنالوگ" قرار می گیرند. این بدان معنی است که ولتاژهای سنسور ورودی ابتدا باید در ADC (مبدل آنالوگ - دیجیتال) دیجیتالی شوند. گروه پایینی سنسورها (سنسور موقعیت میل لنگ به سنسور سرعت خودرو) از قبل سیگنال خود را به صورت دیجیتال ارائه می دهند. سیگنال های روشن و خاموش یا ولتاژهای بلوک مستقیماً به CPU اعمال می شوند.
محرک های سمت راست توسط یک مرحله خروجی کنترل می شوند. یک مرحله خروجی که درایور نیز نامیده می شود از مداری متشکل از چندین ترانزیستور برای تولید ولتاژ و جریان قابل استفاده از یک پالس کنترلی از رایانه برای کنترل محرک تشکیل شده است.
منطق ترانزیستور ترانزیستور (TTL):
پردازنده با ولتاژ 5 ولت کار می کند. بنابراین ولتاژ ورودی و خروجی به محدوده 0 تا 5 ولت محدود می شود (سطح TTL، به اختصار از منطق ترانزیستور ترانزیستور). برای سیگنال هایی که از این سطح ولتاژ منحرف می شوند، یک تنظیم در مدار رابط انجام می شود.
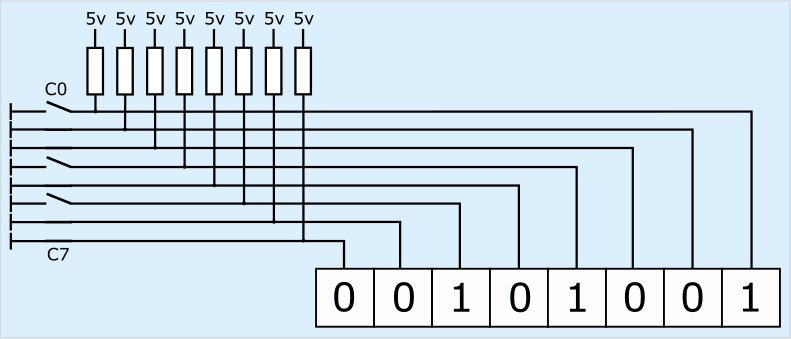
تصاویر زیر نشان می دهد که چگونه یک یا یک 1 از موقعیت سوئیچ تشکیل می شود. با استفاده از یک مقاومت کششی ولتاژ 0 ولت یک را فراهم می کند منطقی 1 روی ورودی پردازنده وقتی سوئیچ باز می شود. سپس ولتاژ روی مقاومت کششی به زمین متصل نمی شود.
هنگامی که کلیدها بسته می شوند، افت ولتاژ در سراسر مقاومت کششی رخ می دهد. ولتاژ 0 ولت در ورودی پردازنده به صورت مشاهده می شود منطقی 0.
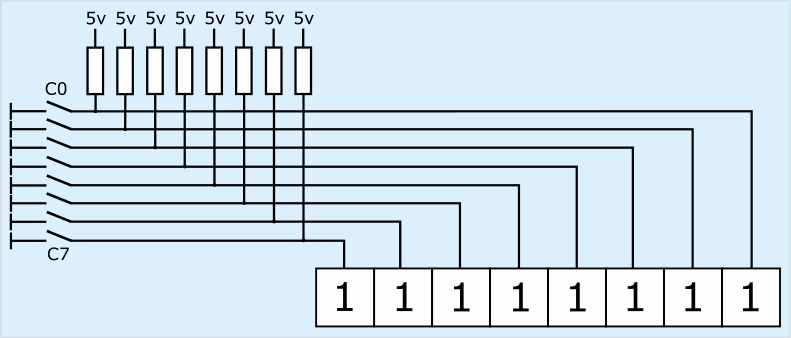
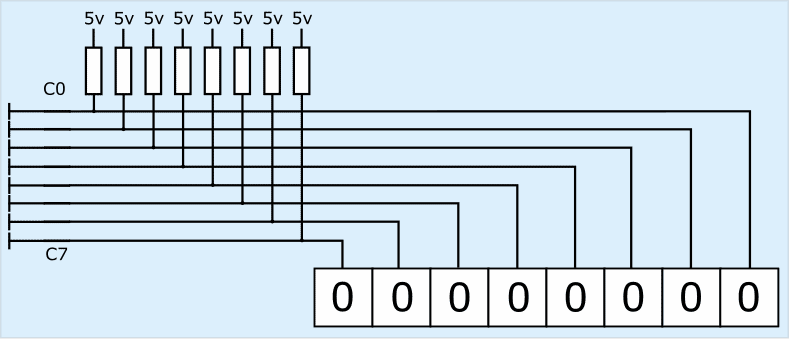
ترکیبی از کلیدهای باز و بسته مجموعه ای از یک ها و صفرها را تولید می کند. در شکل، پیام 8 بیتی به پردازنده این است: 00101001.
با یک پردازنده 8 بیتی، هشت بیت به طور همزمان در هر چرخه خوانده می شوند. در طول چرخه بعدی، که در طول "تیک" بعدی ساعت اتفاق می افتد (نگاه کنید به اتوبوس سیستم در صفحه مربوط به عملکرد ECU) دنباله ای با هشت بیت جدید دنبال می شود.
تبدیل ولتاژ سنسور آنالوگ به پیام دیجیتال:
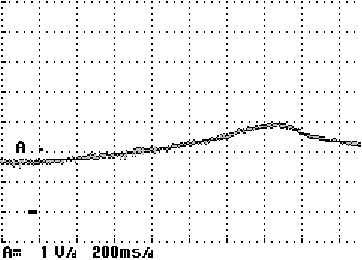
سیگنال های ورودی دیجیتال مستقیماً توسط پردازنده پردازش می شوند. سیگنال های آنالوگ ابتدا در مبدل A/D به سیگنال دیجیتال تبدیل می شوند. به عنوان مثال، منحنی ولتاژ آنالوگ یک سنسور فشار توربو را در نظر می گیریم:
- در حالت بیکار ولتاژ تقریباً 1,8 ولت است.
- هنگام شتاب گیری، ولتاژ تقریباً به 3 ولت افزایش می یابد.
تغییر ولتاژ را نمی توان مستقیماً در پردازنده پردازش کرد. ابتدا باید ولتاژ اندازه گیری شده به یک مقدار اعشاری (0 تا 255) تبدیل شود.
با محدوده 0 تا 5 ولت و مقدار اعشاری از 0 تا 255 (بنابراین 256 احتمال). یک محاسبه ساده نشان می دهد که اگر 5 ولت را بر روی 256 احتمال تقسیم کنیم، می توان مراحل 19,5 میلی ولت (0,0195 ولت) را انجام داد.
مثال بالا توسعه ولتاژ در مقابل زمان سنسور فشار توربو را نشان داد. منحنی ولتاژ سنسور دما و سنسور موقعیت پدال گاز یکسان است، فقط در یک بازه زمانی متفاوت: گرم کردن مایع خنک کننده بیشتر از چرخاندن توربو طول می کشد.
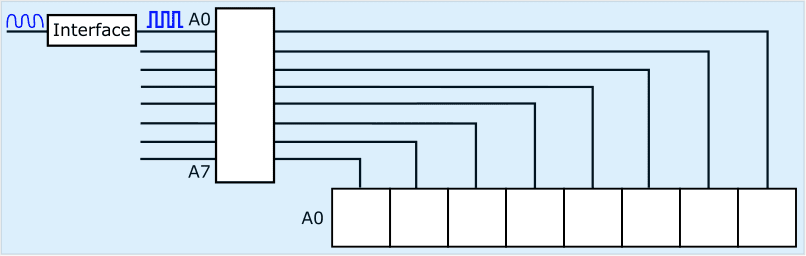
قبلاً در این بخش تصویری وجود دارد که دسته ای از سیگنال های آنالوگ را نشان می دهد. این، در میان چیزهای دیگر، سنسور دما و سنسور موقعیت پدال گاز را نشان می دهد. ولتاژ آنالوگ در مبدل A/D به یک واحد اطلاعات 8 بیتی تبدیل می شود. بسیاری از پردازنده ها با چندین پین ورودی فقط یک مبدل A/D دارند. چندین سیگنال آنالوگ با استفاده از مالتی پلکس در یک سیگنال ترکیب می شوند.
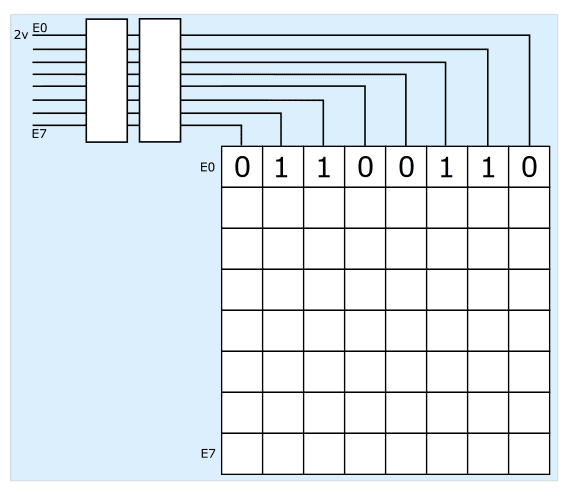
در این مثال یک مبدل A/D با هشت ورودی می بینیم. روی پایه 0 ولتاژ 2 ولت وجود دارد. پایه های E1 تا E7 را می توان همزمان با ولتاژ تامین کرد. اینها یکی یکی به پیام دیجیتال با استفاده از مالتی پلکس تبدیل می شوند.
ولتاژ 2 ولت به یک مقدار باینری تبدیل می شود. با فرمول زیر می توانیم ولتاژ آنالوگ را به یک مقدار اعشاری تبدیل کنیم و سپس آن را به یک مقدار باینری تبدیل کنیم:
2v / 5v * 255d = 102d
در اینجا ولتاژ ورودی (2v) را بر ولتاژ حداکثر (5v) تقسیم می کنیم و آن را در حداکثر مقدار اعشاری (255) ضرب می کنیم.
با انجام برخی محاسبات یا انجام یک ترفند دقیق، می توانیم عدد اعشاری 255d را به مقدار باینری 01100110 تبدیل کنیم.
برای این کار به صفحه مراجعه کنید: باینری، اعشاری، هگزادسیمال.
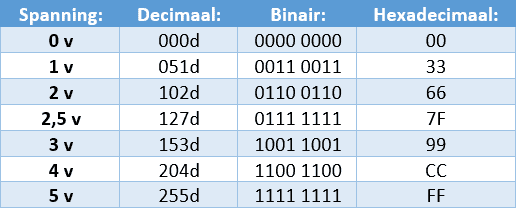
جدول زیر مقادیر اعشاری، باینری و هگزادسیمال مرتبط با ولتاژهای مختلف را نشان می دهد.
هنگام خواندن داده های زنده، مقدار اعشاری، باینری یا هگزادسیمال سیگنال سنسور ممکن است نمایش داده شود.
- سیگنال ولتاژ کمتر از 0,5 ولت (025d) به عنوان اتصال کوتاه به زمین در نظر گرفته می شود.
- اگر سیگنال بالاتر از 4,5 ولت (220d) باشد، کامپیوتر این را به عنوان یک اتصال کوتاه با مثبت ترجمه می کند.
تبدیل سیگنال های مولد پالس به پیام دیجیتال:
سیگنالهای ژنراتورهای پالس، از جمله سنسور موقعیت میل لنگ القایی، در واقع سیگنالهای روشن و خاموش هستند که پس از عبور دندانههای چرخ پالس از کنار سنسور ایجاد میشوند. ولتاژ متناوب سنسور باید ابتدا به ولتاژ موج مربعی قبل از ارائه سیگنال به پردازنده تبدیل شود.
در شکل یک ولتاژ متناوب سینوسی در سمت چپ رابط مشاهده می کنیم. در الکترونیک رابط، این ولتاژ متناوب به ولتاژ موج مربعی تبدیل می شود. سپس این ولتاژ بلوک توسط بلوک تایمر/ شمارنده خوانده میشود: وقتی پالس زیاد است، شمارنده شروع به شمارش میکند و با بالا رفتن مجدد پالس، شمارش متوقف میشود. تعداد شمارش ها معیاری از زمان دوره است. فرکانس سیگنال
در تصویر زیر سیگنالی از سنسور میل لنگ القایی با نقاط قرمز در پهلوهای بالایی مشاهده می کنیم. نقاط قرمز روی یک ولتاژ برای افزایش (منطقی 1) یا کاهش (منطقی 0) ولتاژ بلوک تنظیم می شوند. توضیح در زیر این تصویر ادامه دارد.
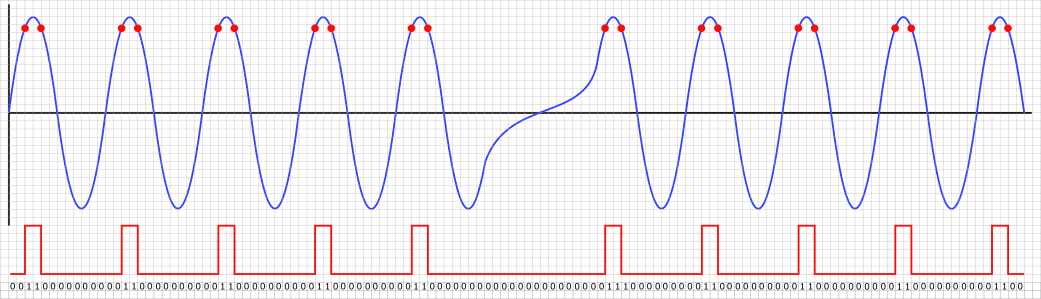
با این حال، ولتاژ سنسور هرگز کاملا خالص نیست. همیشه یک نوسان کوچک در پروفیل ولتاژ وجود خواهد داشت. در آن صورت، الکترونیک رابط ممکن است به اشتباه این را به عنوان یک 0 منطقی نشان دهد، در حالی که در واقع باید 1 باشد.
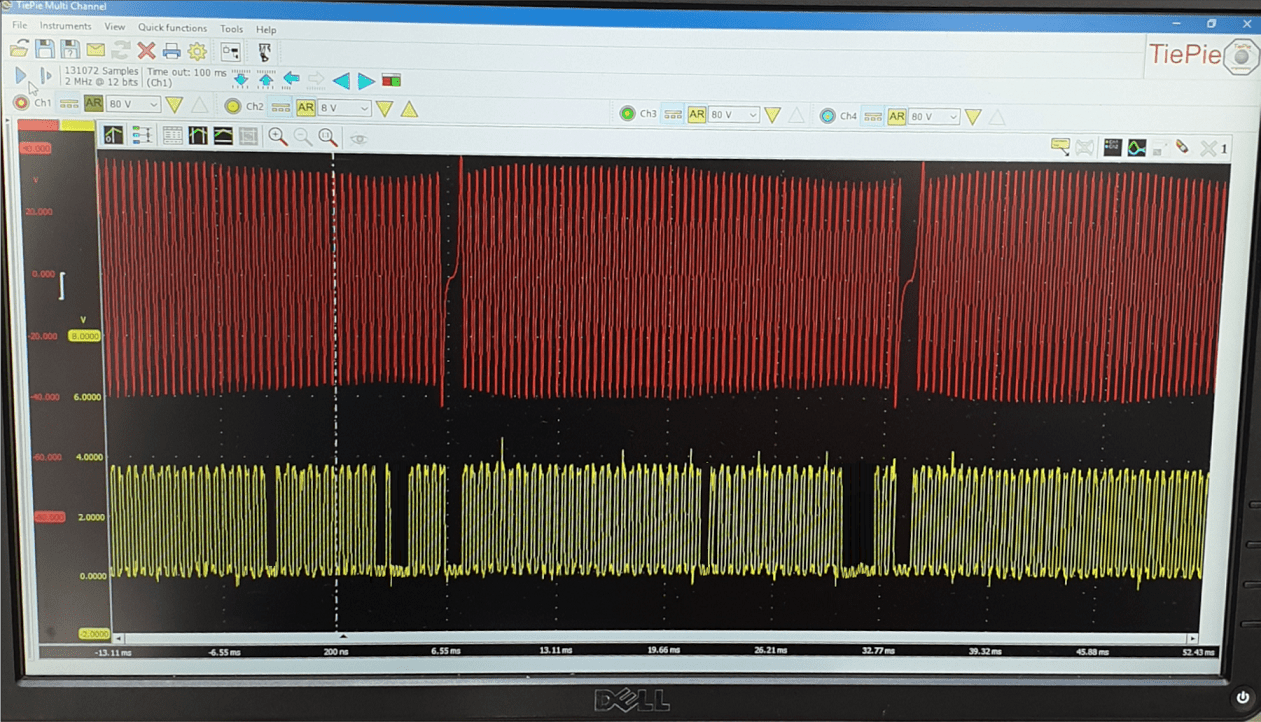
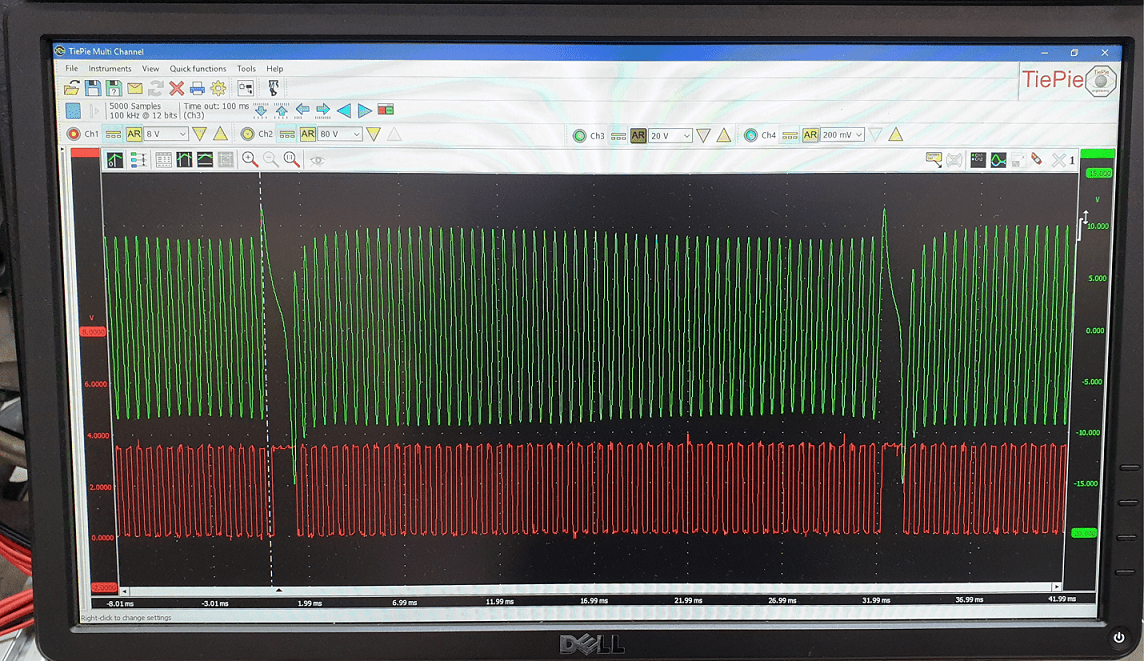
تصویر scope زیر هنگام اجرای آن ضبط شده است پروژه BMW Megasquirt. تصویر دامنه دیجیتالی شدن (زرد) سیگنال میل لنگ القایی (قرمز) را نشان می دهد. تصویر به وضوح نشان می دهد که در سیگنال بلوک زرد پالس هایی وجود ندارد، در حالی که در آن لحظه هیچ دندان گمشده ای در سیگنال میل لنگ عبور نمی کند.
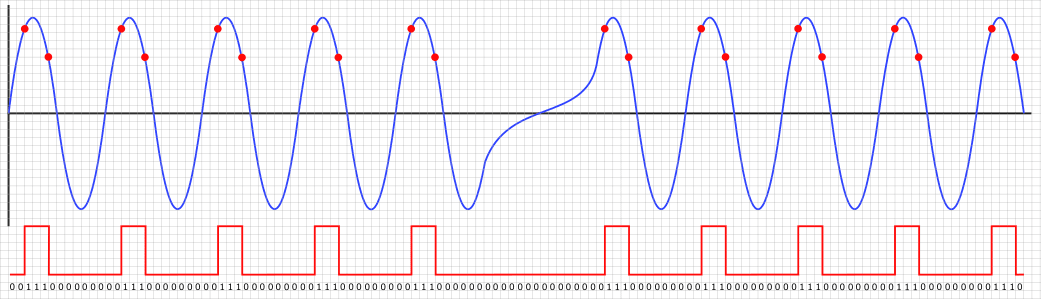
برای اطمینان از اینکه نوسانات کوچک در پروفیل ولتاژ باعث تفسیر نادرست ECU نمی شود، به اصطلاح هیسترزیس تعبیه شده است. هیسترزیس تفاوت بین لبه های افزایشی و نزولی پروفیل ولتاژ است. در تصویر زیر می بینیم که نقاط قرمز روی لبه های در حال افزایش ولتاژ بیشتری نسبت به نقاط قرمز روی لبه های در حال سقوط دارند. به این ترتیب می توان مطمئن بود که نوسانات کوچک در سیگنال بر تبدیل دیجیتال تأثیر نمی گذارد.
در پاراگراف اول که در مورد تبدیل سیگنال پالس به سیگنال دیجیتال شروع کردیم، قبلاً ذکر شد که فرکانس سیگنال بر اساس زمان بین دو لبه بالارونده سیگنال مربع تعیین می شود. در این مثالها به وضوح میتوان نتیجه گرفت که پسماند بر عرض سیگنال مربع تأثیر میگذارد، اما تأثیری بر زمان بین لبههای بالارونده ندارد و بنابراین تأثیری بر فرکانس سیگنال ندارد.
با یک هیسترزیس به درستی تنظیم شده، سیگنال سینوسی به درستی به یک ولتاژ موج مربع قابل استفاده تبدیل می شود، تنها با ولتاژهای چندگانه منطقی در مکان هایی که دندان از دست رفته عبور می کند.
لطفاً توجه داشته باشید، هنگام راهاندازی ECU MegaSquirt، تنظیمات از جمله راهاندازی در خطوط افزایش و سقوط تغییر کردند. در نتیجه هنگام عبور از دندان از دست رفته در مثال اول، ولتاژ 0 ولت و در تصویر اسکوپ زیر ولتاژ 5 ولت است.
سیگنال های خروجی:
سیگنال های خروجی شامل پالس های دیجیتال روشن/خاموش با محدوده ولتاژ بین 0 تا 5 ولت (سطح TTL) با جریان بسیار کم است. با این حال، محرک ها نیاز به کنترل با سطوح ولتاژ و جریان بالاتر دارند.
سیگنال های روشن/خاموش را می توان مدوله کرد عرض پالس (PWM) که در آن عرض پالس می تواند با فرکانس ثابت تغییر کند.
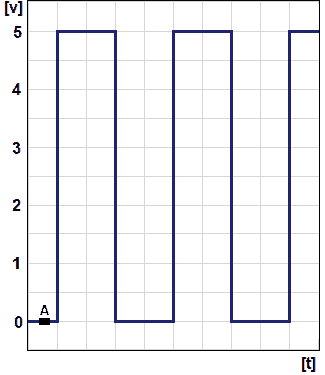
شکل زیر یک ولتاژ موج مربعی در سطح TTL را به صورت تابعی از زمان نشان می دهد. این چرخه کار این سیگنال PWM 50٪ است.
برای کنترل محرک ها به درایور نیاز است. با سیگنال خروجی دیجیتال، جریان مورد نیاز را می توان با یک درایور به دست آورد. در بخش بعدی به درایورها خواهیم پرداخت.
ما درایورها را در هر ECU و در برخی از محرک ها مانند کویل های احتراق DIS پیدا می کنیم. درایور مرحله خروجی یا ترانزیستور قدرت نیز نامیده می شود. درایور امکان تبدیل سیگنال های خروجی را در سطح TTL: 0 تا 5 ولت، با جریان کم 1 میلی آمپر از ECU به ولتاژ تا 14 ولت و جریان تا حدود 10 آمپر را ممکن می کند.
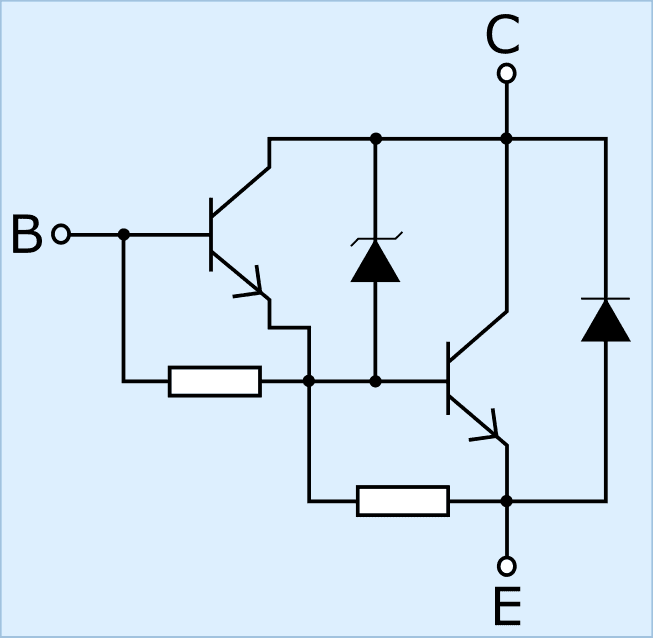
یک درایور می تواند چندین را متصل کند ترانزیستورها حاوی. ما چنین ترانزیستوری را "ترانزیستور دارلینگتون". تصاویر زیر مدارهای زیر را نشان می دهد:
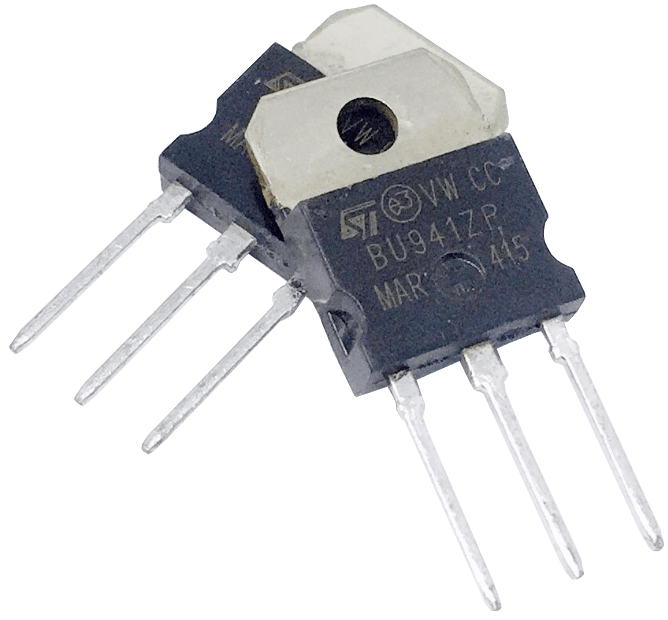
- شماتیک مدار دارلینگتون با دو ترانزیستور برای کنترل سیم پیچ احتراق (منبع: برگه داده BU941ZR).
- دو ترانزیستور، هر کدام دارای مدار دارلینگتون (BU941ZR)
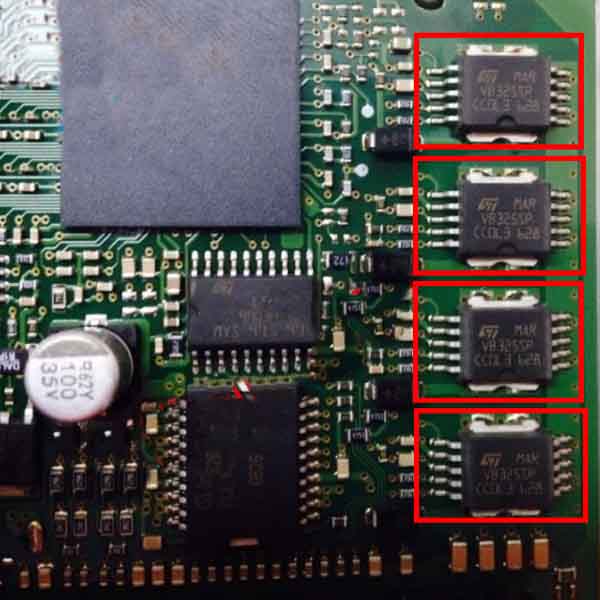
- آی سی های درایور با مدارهای دارلینگتون و لوازم الکترونیکی اضافی برای محافظت از دما و بازخورد به ریزپردازنده.
در صفحه: روش های کنترل محرک ها کنترل محرک های غیرفعال، فعال و هوشمند با استفاده از یک ترانزیستور (قدرت) یا FET با جزئیات بیشتری مورد بحث قرار گرفته است.