فاعل، موضوع:
- مقدمه
- موتور الکتریکی AC (سنکرون، با آهنرباهای دائمی)
- کنترل AC موتور سنکرون
- موتور الکتریکی AC (موتور ناهمزمان، قفس سنجابی)
- نقشه کارایی موتور الکتریکی سنکرون و ناهمزمان
معرفی:
موتور الکتریکی برای راندن خودروهای هیبریدی یا تمام الکتریکی استفاده می شود. موتور الکتریکی انرژی الکتریکی (از باتری یا افزایش دهنده برد) را به حرکت برای به حرکت درآوردن چرخ ها تبدیل می کند. علاوه بر این، موتور الکتریکی همچنین می تواند انرژی جنبشی را در هنگام ترمز کردن موتور به انرژی الکتریکی تبدیل کند: ترمز احیا کننده. در این حالت موتور الکتریکی به عنوان یک دینام عمل می کند. به دلیل این دو عملکرد، موتور الکتریکی را "ماشین الکتریکی" نیز می نامیم.
گزینه های قرار دادن موتور الکتریکی در یک خودروی هیبریدی عبارتند از:
- در موتور احتراقی، جایی که انتقال از طریق یک تسمه چندگانه یا مستقیماً از طریق میل لنگ انجام می شود.
- بین موتور و گیربکس: محور ورودی گیربکس توسط موتور الکتریکی هدایت می شود.
- یکپارچه در جعبه دنده؛
- در مورد دیفرانسیل؛
- در توپی چرخ (موتور توپی).
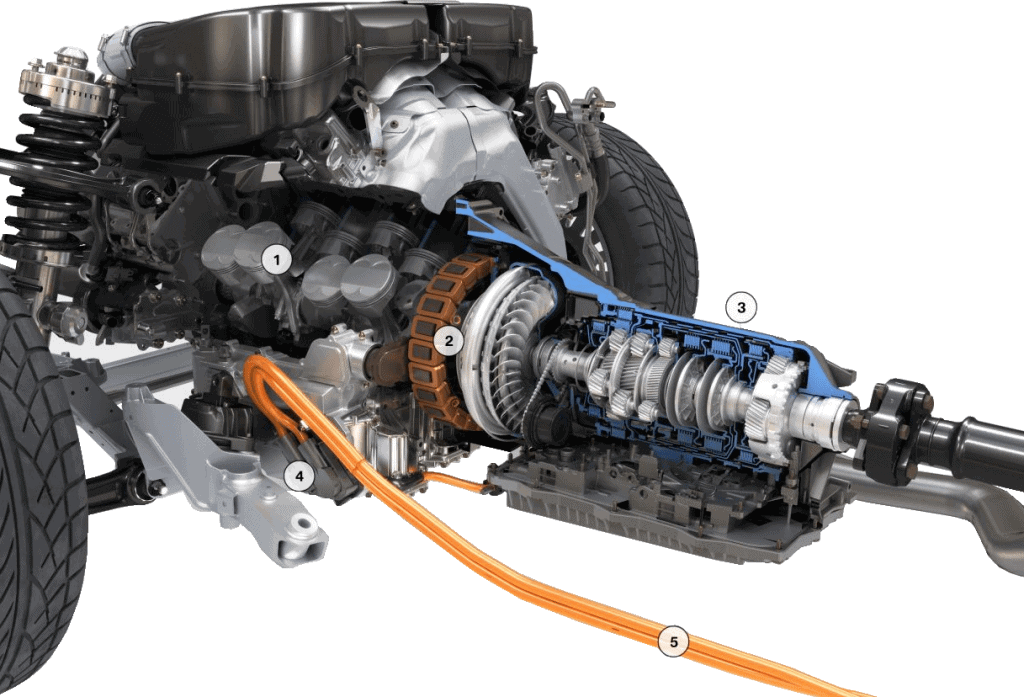
موتور الکتریکی یک ماشین تمام الکتریکی اغلب در محور عقب نصب می شود. تصویر زیر موتور الکتریکی را با اینورتر در محفظه استوانه ای و محرک نهایی یک تسلا نشان می دهد.

موتور الکتریکی AC (سنکرون، با آهنرباهای دائمی):
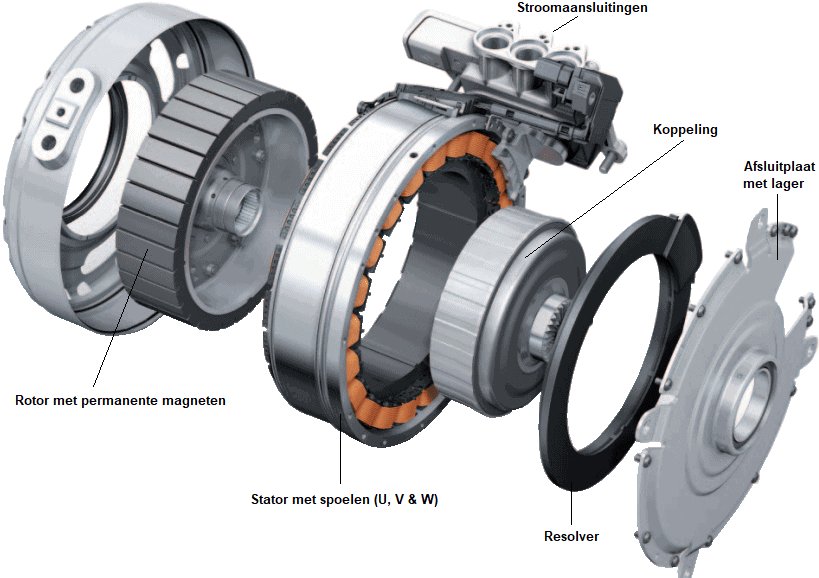
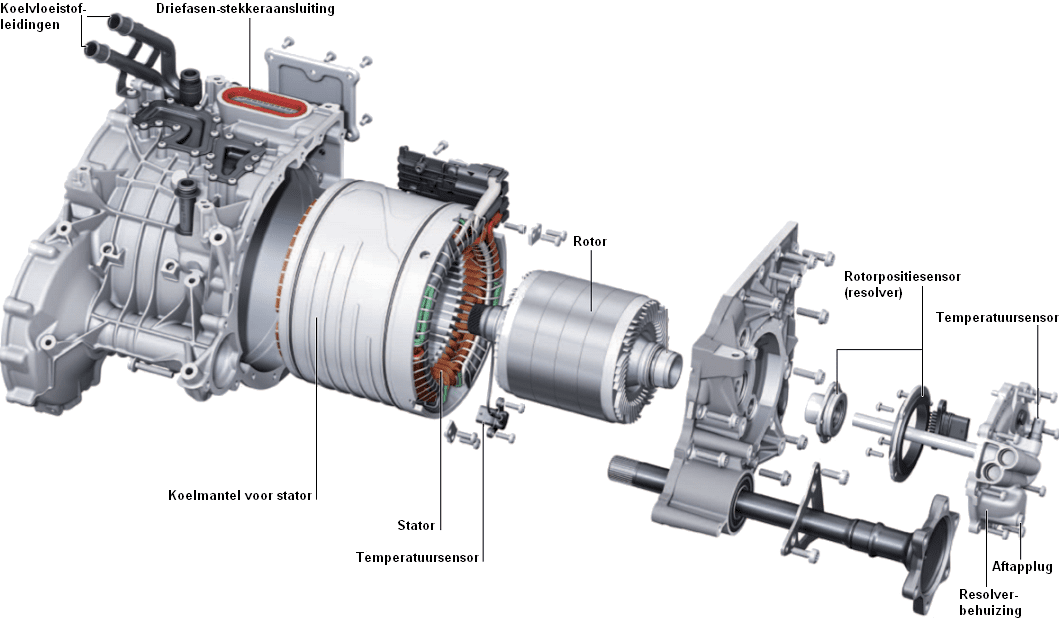
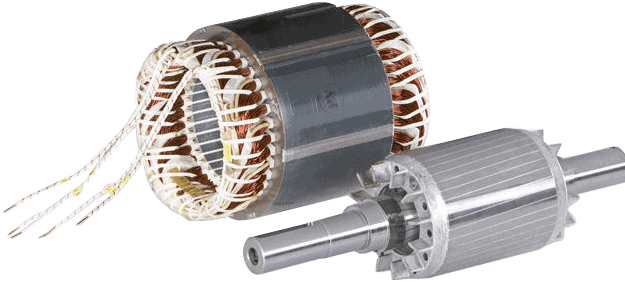
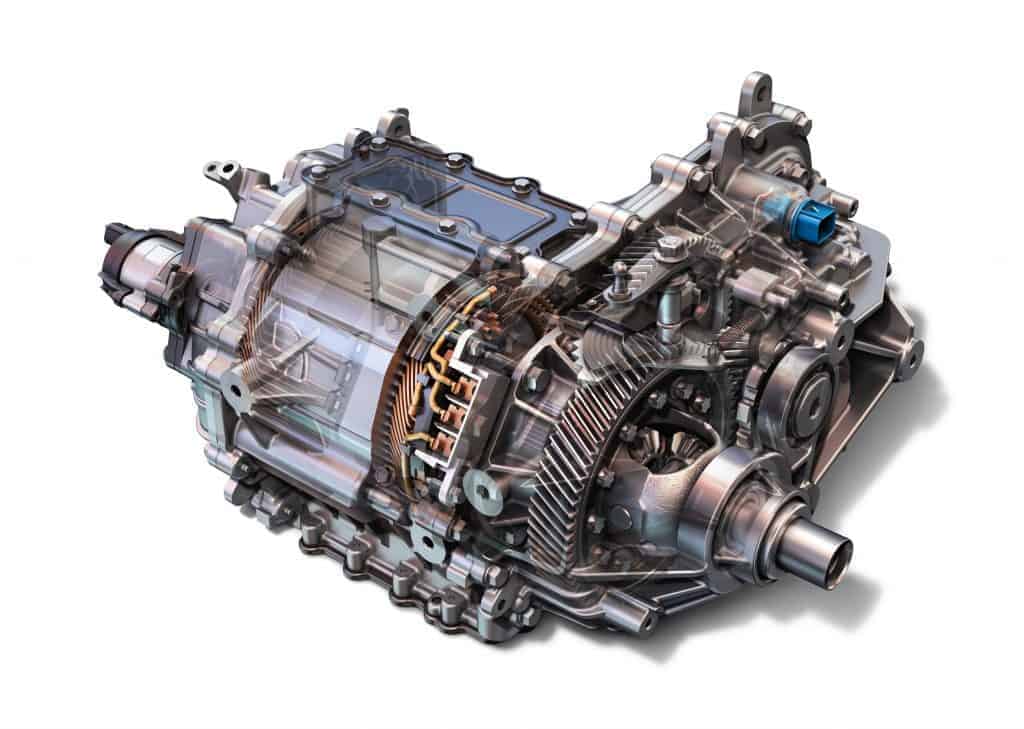
تصویر زیر قطعات یک موتور الکتریکی آئودی (سنکرون) را نشان می دهد. این نوع در انواع هیبریدی A6 و A8 استفاده می شود. به طور خلاصه اجزاء را فهرست می کنیم. این اجزاء در پاراگراف های زیر به تفصیل توضیح داده شده اند.
روتور با آهنرباهای دائمی در نتیجه تغییر میدان مغناطیسی در استاتور شروع به چرخش می کند. روتور به کلاچ متصل است، که می تواند موتور احتراق و موتور الکتریکی (به همراه یک کلاچ (نشان داده نشده)) را در شرایط کاری مختلف وصل یا جدا کند. موقعیت روتور توسط برطرف کننده اندازه گیری شده: این داده برای درایورهای IGBT مهم است تا سیم پیچ های استاتور را در زمان مناسب کنترل کنند.
موتور الکتریکی با آهنرباهای دائمی را می توان با هر دو DC (ولتاژ مستقیم) و AC (ولتاژ متناوب) کنترل کرد.
موتور سنکرون یکی از رایج ترین موتورهای الکتریکی مورد استفاده در خودروهای هیبریدی یا تمام الکتریکی است. این نوع موتور الکتریکی از یک استاتور با سیم پیچی و یک روتور با چندین آهنربای دائمی تشکیل شده است. روتور با همان سرعت میدان مغناطیسی استاتور می چرخد. موتور سنکرون را می توان به صورت زیر کنترل کرد:
- AC: توسط یک سیگنال سینوسی (جریان متناوب) کنترل می شود.
- DC: با سیگنال مربع یا ذوزنقه ای (جریان مستقیم) کنترل می شود.
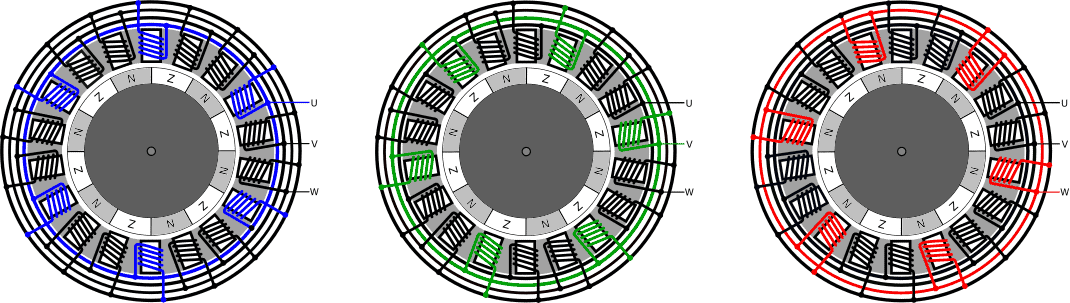
استاتور موتور سنکرون از سه گروه سیم پیچ استاتور تشکیل شده است: U، V و W. هر گروه شامل سه مجموعه از شش سیم پیچ است که به صورت موازی به هم متصل شده اند که در کل محیط استاتور توزیع شده اند. هر سوم سیم پیچ متعلق به همان سری است.
- کویل U: آبی
- کویل های V: سبز
- سیم پیچ W: قرمز
روتور حاوی چندین آهنربای دائمی است. با انرژی دادن متناوب سیم پیچ ها در استاتور، یک میدان مغناطیسی دوار ایجاد می شود. روتور میدان دوار را دنبال می کند و بنابراین می چرخد.
کنترل AC موتور سنکرون:
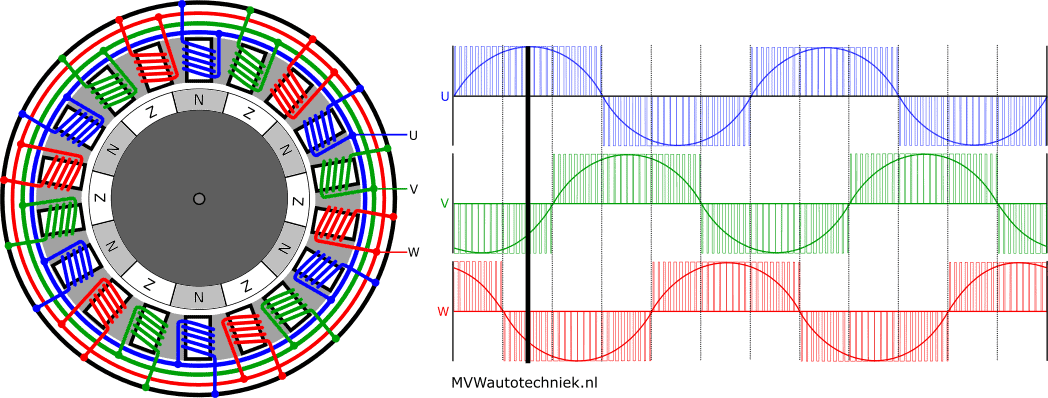
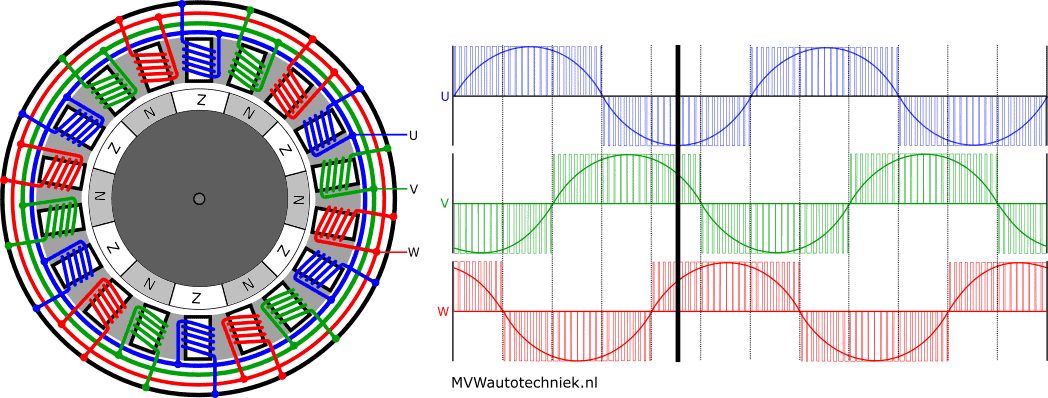
کنترل AC از کنترل فرکانس کنترل شده یا کموتاسیون سینوسی استفاده می کند. سیم پیچ های استاتور با یک ولتاژ متناوب سه فاز سینوسی برای چرخش روتور عرضه می شوند.
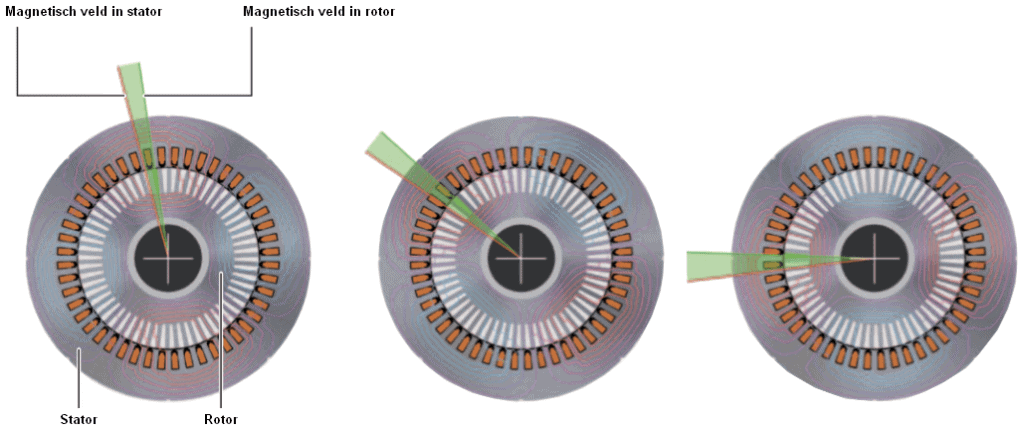
تصویر زیر موقعیت روتور را با یک سیم پیچ U حداکثر برانگیخته نشان می دهد. در نتیجه میدان مغناطیسی، قطبهای شمال مستقیماً در مقابل سیمپیچهای U قرار گرفتهاند. مکان نما در نمودار کنار موتور الکتریکی، کنترل سیم پیچ ها را در آن لحظه نشان می دهد.
برای اطلاع شما: روتور در توضیحات هنگام کنترل سیم پیچ های استاتور می چرخد در جهت عقربه های ساعت.
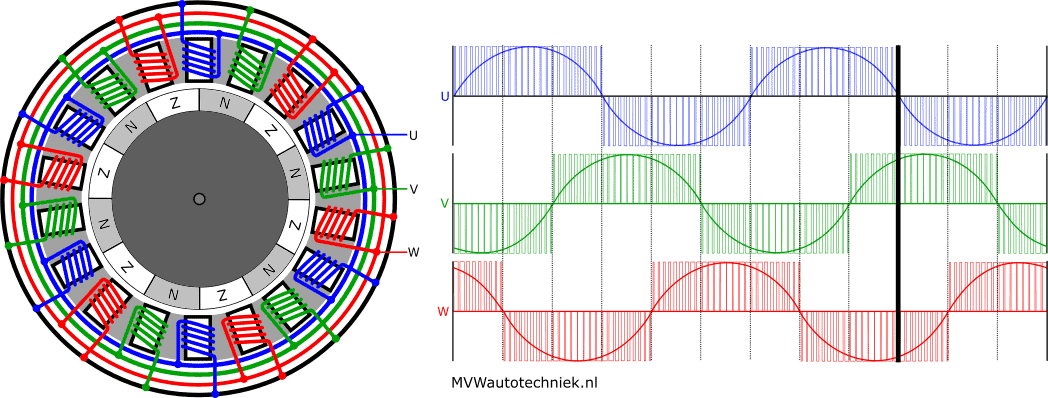
در تصویر زیر، موج سینوسی، یعنی جریان متناوب از سیم پیچ U، حداکثر منفی است. در طی این کنترل، قطبهای جنوبی روتور مستقیماً در مقابل سیمپیچهای استاتور دارای انرژی (U) قرار دارند.
در واقع یک شکاف هوایی کوچک بین قطب شمال و جنوب روتور وجود دارد. در طول تغییر از قطب جنوب به شمال، جهت جریان در سیم پیچ U تغییر می کند. به علاوه:
- جریان عبوری از سیم پیچ V (سبز) تقریباً حداکثر مثبت است. قطب شمال نیز تقریباً در مقابل سیم پیچ قرار دارد.
- جریان عبوری از سیم پیچ W حداکثر منفی بوده و در حال افزایش است. قطب جنوب از کنار سیم پیچ چرخیده است.
برای اینکه تصوری از جریان جریان داشته باشید، انیمیشن زیر چرخش روتور به دلیل جریان متناوب را نشان می دهد.
موتور الکتریکی AC (موتور ناهمزمان، قفس سنجابی):
موتور الکتریکی قفس سنجاب یا آرمیچر اتصال کوتاه یک موتور ناهمزمان است. تفاوت بین موتور سنکرون با آهنرباهای دائمی و موتور ناهمزمان در روتور است: این یک درام آهنی نرم با هادی ها در جهت طولی است. روتور به صورت ناهمزمان با استاتور کار می کند، به این معنی که بین روتور و سرعت مغناطیسی استاتور اختلاف سرعت وجود دارد. استاتور دقیقاً همینطور است.
روتور موتور الکتریکی ناهمزمان از سیم پیچ های اتصال کوتاه تشکیل شده است. سیم پیچ های U، V و W از یک طرف به یکدیگر متصل می شوند. هنگامی که روتور در میدان چرخان استاتور است، یک ولتاژ القایی در سیم پیچ های روتور ایجاد می شود. از آنجایی که سیم پیچ های روتور با یکدیگر اتصال کوتاه دارند، جریانی از آنها عبور می کند. این جریان باعث می شود روتور یک میدان مغناطیسی ایجاد کند و گشتاور ایجاد کند. از آنجایی که عملکرد الکتروموتور ناهمزمان بر اساس قانون القایی است، به آن موتور القایی نیز می گوییم.
گشتاور تحویلی بر لغزش بین میدان مغناطیسی دوار در استاتور و سرعت روتور تأثیر می گذارد.
موتور آسنکرون در مقایسه با موتور سنکرون مزایا و معایبی دارد.
مزایا:
- روتور نسبتا ساده، قوی و ارزان.
- گشتاور بالا در سرعت کم
مضرات:
- چگالی توان کمتر (در هر جرم) و راندمان (بازده). جریان در سیم پیچ های روتور اتصال کوتاه باعث تلفات اضافی روتور می شود.
- سرعت را نمی توان به طور دقیق کنترل کرد زیرا به بار بستگی دارد. این به خودی خود نباید یک نقطه ضعف باشد: با یک سیستم کنترل خوب می توان سرعت موتور ناهمزمان را نیز تنظیم کرد.
- جریان راه اندازی بالا
موقعیت روتور و سرعت موتور ناهمزمان با a اندازه گیری می شود سنسور موقعیت روتور. سنسورهای هال اغلب حداقل چهار پالس در هر دور روتور را برای انتقال موقعیت و سرعت روتور ارائه می دهند. ما این نوع سنسور موقعیت روتور را حل کننده نمی نامیم، همانطور که در مورد موتور سنکرون وجود دارد.
برخلاف موتور سنکرون، سنسور موقعیت روتور برای دانستن موقعیت روتور در حالت سکون ضروری نیست. موقعیت روتور در حین چرخش مهم است: باید مراقب بود که لغزش بین میدان دوار مغناطیسی و روتور خیلی زیاد نشود. وقتی میدان دوار خیلی سریع حرکت می کند، ممکن است وضعیتی پیش بیاید که روتور ناگهان بخواهد در جهت دیگر بچرخد. نیروهایی که به وجود می آیند می توانند برای اجزای مکانیکی و الکتریکی فاجعه بار باشند.
برخی از سازندگان نیز استفاده از موتور ناهمزمان را انتخاب می کنند برطرف کننده اعمال کردن دلیلش برای من ناشناخته است. در هر صورت، رزولوشن هم هنگام ایستادن و هم در حین دویدن بسیار دقیق است، که ممکن است به کنترل دقیق کمک کند.
نقشه بازده موتور الکتریکی سنکرون و ناهمزمان:
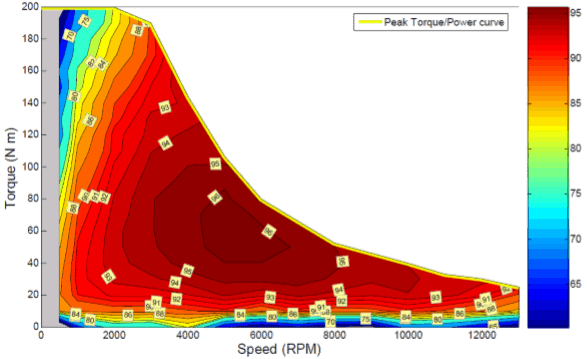
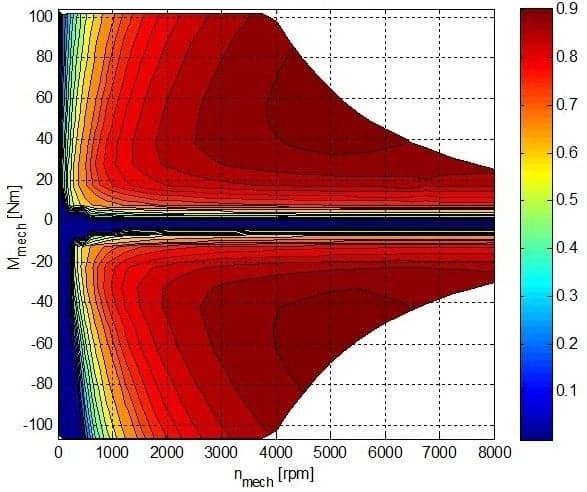
تصاویر زیر کارایی موتور الکتریکی سنکرون (سمت چپ) و موتور الکتریکی ناهمزمان (سمت راست) را نشان می دهد.
- موتور الکتریکی سنکرون بسیار کارآمد است. راندمان در یک منطقه بزرگ بالای 90٪ است، با مقادیر اوج تا 96٪. از دور 2000، تضعیف میدان رخ می دهد و باعث کاهش حداکثر گشتاور می شود.
- موتور آسنکرون بازدهی قابل توجهی کمتر از موتور سنکرون در سرعت های پایین تر دارد.
صفحات مرتبط: