Teemad:
- üld-
- Rataste joondamine
- Jälgimine
- Kamber / kumerus
- KPI (kuninganõela kalle)
- Kinnine nurk
- Telje kallutamine / ratas
- Puhastuskiir
- Ackermanni põhimõte
Üldine:
Auto juhitavus ja juhitavus sõltuvad suuresti ratta geomeetriast. Mõiste "ratta geomeetria" on kõigi sellel lehel käsitletavate rataste ja roolisangade asendite nimi. Auto projekteerimisel kontrollitakse põhjalikult auto ratta geomeetriat. Näiteks Mercedese A-klassi esimese versiooni testimisel selgus, et see auto võib slaalomikatsel ümber kukkuda. Pärast neid dramaatilisi katsetulemusi reguleeriti rataste asendit ja stabilisaatori tööd, kuni see beebi-Benz oli samaväärne suuremate sõidukitega. The stabilisaatorvarras omab suurt mõju auto juhitavusele, mida kirjeldatakse eraldi peatükis.
Rataste joondus:
On oluline, et kõik rataste asendid, näiteks varvas ja kumerus, oleksid õigesti reguleeritud. Kui on tehtud parandusi, näiteks rööpvarda väljavahetamist või juhthoova või alamraami lahtivõtmist/kokkupanemist, on suur tõenäosus, et reguleerimine ei ole enam õige. Isegi pärast kokkupõrget teise autoga või pärast äärekivi sõitmist ei pruugi reguleerimine enam õige olla. Kui ratas on auto all silmnähtavalt viltu, on probleem kõverdatud juhthoobiga või tõmbevardaga. Seetõttu tuleb need osad välja vahetada!
Seejärel tuleb auto joondada. Joondamine toimub spetsiaalsel joondamispingil, kus arvuti näeb andurite (ratastele paigaldatud) abil täpseid asendeid, võimaldades kõike täpselt reguleerida. Igal automargil ja -tüübil on kindlad seadistused. Madalamatel autodel on ka erinevad reguleerimisväärtused kui sarnastel standardse šassiiga autodel.
Reguleerimisväärtused ei pruugi eesmärki saavutada. Need on siis väljaspool tolerantse. Kui esikülje kumerust ei saa parandada (kui see jääb punaseks), on suur tõenäosus, et amortisaator on painutatud. Kokkupõrke või pauguga kõnniteele sõitmise korral paindub McPhersoni vedrustuse nõrgim koht; amortisaatori kolvivarras. Samuti võib kõverduda roolinukk (koos rattalaagriga).
Vale joondus pärast vedrustuse remonti või kõnniteel väikest koputust on märgatav mitmel viisil:
- Otse sõites on rool viltu.
- Auto tõmbab ühele poole teed ja seda tuleb alati parandada rooli keerates.
- Tee stabiilsus on halb ja muudab suunda iga konarusega teel.
- Liigne rehvide kulumine, sageli ebaregulaarne: rehvi sisemus on 4 mm ja välispind sile.
Peagi tuleb leht, mis tööd joondamisel tehakse...
Allolevad teemad annavad ülevaate igat tüüpi rattaasenditest, mida saab (enamusel) autodel reguleerida.

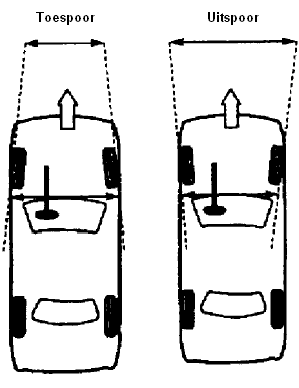
Rada:
Varvas on nii esi- kui ka tagarataste suund. Jälgimist saab reguleerida, muutes tugivardad mõlemalt poolt veidi pikemaks või lühemaks. Seejärel muutub pildi ruum C suuremaks või väiksemaks. Roolivarda pea F liigub seejärel sisse või välja, põhjustades ratta asendi muutumise.
Kui rattad on paigal olles veidi teineteise poole, kutsume seda toe-in, ja kui need on üksteisest veidi eemal, siis me seda toe-in. Sõidu ajal on rattad täpselt otseasendis. Toe-in ja toe-out nimetatakse sageli ka "Toe-in" ja "Toe-out".
Tagaveoga autosid reguleeritakse esisillal asuva varbaga. Sõidu ajal tõmmatakse rattad väljapoole, viies need otseasendisse. Esiveolisi autosid reguleeritakse tavaliselt varvastega. Sõidu ajal tõmmatakse rattad sissepoole, viies need otseasendisse. Siin on tolerants vaid paar kraadi. Piltidel on see märgitud kui "liialdatud", kuid tegelikkuses pole seda lihtne näha. Selle tuvastamiseks on vaja spetsiaalseid joondusseadmeid.
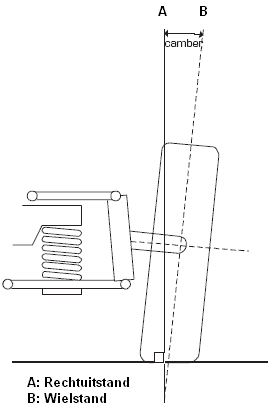
Kamber / kumerus:
Camber, mida nimetatakse ka camber (inglise keeles) või sturz (saksa keeles), on ratta kalle teepinna suhtes. Kumerust mõõdetakse horisontaalse teega risti olevast joonest ja seda näidatakse kraadides. Kukkumine toimub kahes erinevas rakenduses; nimelt positiivne ja negatiivne kumerus. Positiivse kaldega on ratta ülaosa põhjast kaugemale (vt pilti) ja negatiivse kaldega vastupidi; ratta ülemine osa on rohkem sissepoole kui alumine.
Negatiivne kalle parandab teelpüsivust kurvides ja stabiilsust. Seetõttu on ka allalastud sportautodel suurem negatiivne kalle kui tavavedrustusega. Negatiivse kallega rattal on omadus kitseneda sissepoole ja seetõttu surub see ratast sissepoole. Vasakut ja paremat poolt võrdselt reguleerides jätkab auto otsesõitu, kuid rehvide kulumine suureneb rehvide siseküljel.
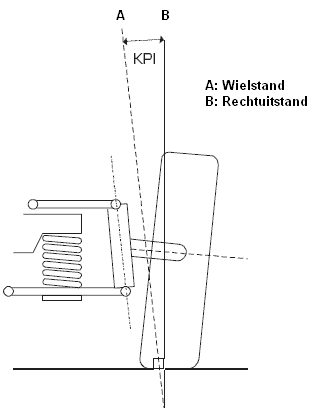
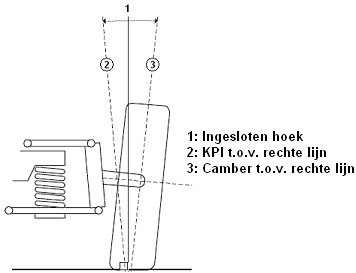
KPI (kuninganõela kalle):
KPI, mida nimetatakse ka juhttelje kaldenurgaks, on nurk juhttelje pöördepunkte läbiva joone ja teepinnaga risti oleva joone vahel. KPI ja Caster (järgmine teema) sunnivad esirattad otseasendisse. See efekt ilmneb seetõttu, et rataste pöördepunkti kalle tõstab rataste pööramisel autot veidi üles. Auto enda kaal sunnib rattad tagasi otseasendisse. Samuti kanduvad teekatte löögid roolile vähem jõuliselt üle. Kui KPI muutub, muutub ka kumerus.
Kaasatud nurk:
Kaasatud nurk, mida nimetatakse ka kaasatud nurgaks või Gabelwinkeliks, ei ole ratta asend, vaid täiendus olemasolevatele KPI ja Camberi kontseptsioonidele. Kaasatud nurga saab määrata mõlema nurga väärtuste liitmisega.
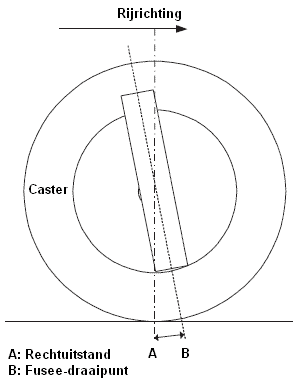
Telje kallutamine / ratas:
Telje kalle, mida nimetatakse ka rattaks, telje kalleks või rööpmeks, on nurk telje pöördepunkti B läbiva keskjoone ja telje A keskpunkti läbiva teega risti oleva joone vahel. Telje kalle on alati positiivne.
Telje kalle annab autole suunastabiilsuse, sest ratas tahab otse sõites olla sõidusuunas. Saate seda võrrelda jalgratta esihargiga, mis on alati ette kallutatud. Kui ratas oleks otse raami all, kaotaksite suure põrutuse korral kontrolli rooli üle. Isegi kui keerate rooli tahapoole, näete, et rool pöördub uuesti, kui ratas on ettepoole. See põhimõte on sama autoga; Asetades esirattad auto alla ettepoole suunatud nurga all, saab auto teelt paremini kinni ning rool naaseb sõidu ajal automaatselt otsesõiduasendisse.
Kaasaegsete autode projekteerimisel kasutatakse sageli suurt telje kallet. See annab eeliseks väga positiivse sõiduomaduse. Suure silla kalde võimalik miinus on see, et auto juhib tugevamini, kuid tänapäeva roolivõimendiga pole see probleem.
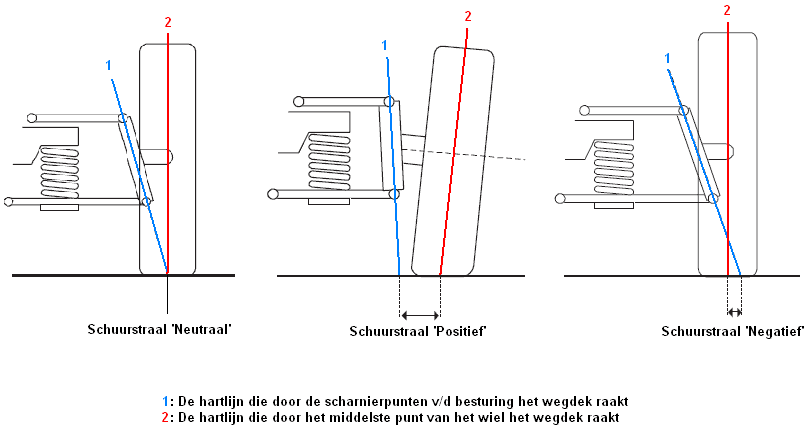
Lihvimisraadius:
Puhastusraadius, mida nimetatakse ka puhastusraadiuseks või Lenkrolli raadiuseks, on vahemaa punkti vahel, kus ratast läbiv keskjoon puudutab teepinda (ratta punkt) ja punkti vahel, kus rooli pöördepunkte läbiv joon puudutab teed. pind (juhtimispunkt). Lihvimisraadius määrab, kui suurel määral muutuvad esirataste kõrgused pööramisel ja vastutab osaliselt auto sirgjoonelise stabiilsuse eest.
- Kui rooli pöördepunkt (sinine joon) on ratta keskpunktiga samal tasapinnal (punane joon), on puhastusraadius '0'. Seda nimetatakse ka "neutraalseks lihvimistalaks" või "keskpunkti juhtimiseks".
- Kui rooli pöördepunkt (sinine joon) on väljaspool ratta keskpunkti (punane joon), on puhastusraadius positiivne.
- Kui rooli pöördepunkt (sinine joon) asub ratta keskpunktis (punane joon), on kulumisraadius negatiivne.
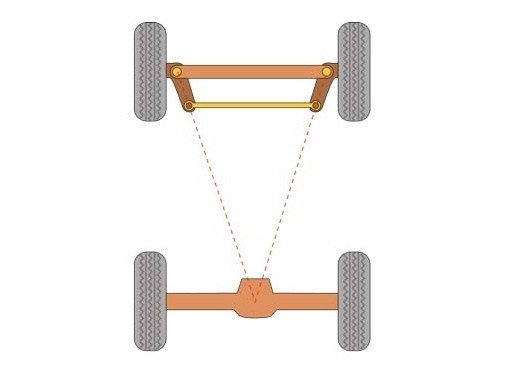
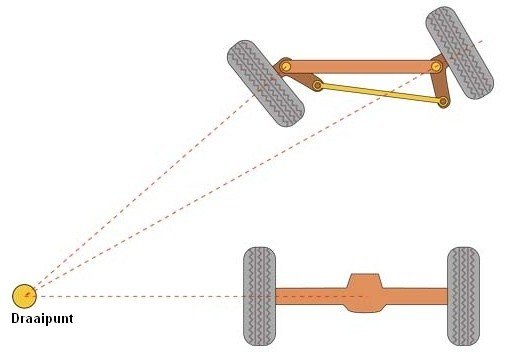
Ackermanni põhimõte:
Allolevatel piltidel on näha, et esirataste jooned tulevad välja ühises pöördepunktis. Kui rattad pöörleksid sama nurga all (mõlemad rattad on keeratud täpselt sama nurga all), jookseksid ka ratastelt tulevad jooned üksteisega paralleelselt lõpmatuseni. Nad ei leia kunagi ühist pöördepunkti M. Seetõttu on juhtimisomadused selles olukorras väga kehvad.
Kogu see põhimõte muutub "kurvis varvas välja"nimeline. Kõik kaasaegsed autod on ehitatud selle funktsiooniga. Siledatel pindadel, nt parkimismaja põrandal, on pööramisel kuulda rehvide kriginat. See on selle põhimõtte tõttu. Sisemine ratas, mille roolinurk on suurem kui välimisel rattal, libiseb.
Otse edasi sõites on kõik rattad otseasendis. Roolisõlmide keskjoonte pikendused lõikuvad tagatelje keskpunktis.
Kurvides väänab sisemine esiratas rohkem kui välimine. Selle põhjuseks on asjaolu, et rooliotsad asetsevad nurga all ja ratas hakkab seestpoolt edasi pöörlema. Kui auto on täielikult sisse pööratud, on hästi näha ka kaldus rattaasend. See konstruktsioon parandab sõiduomadusi.
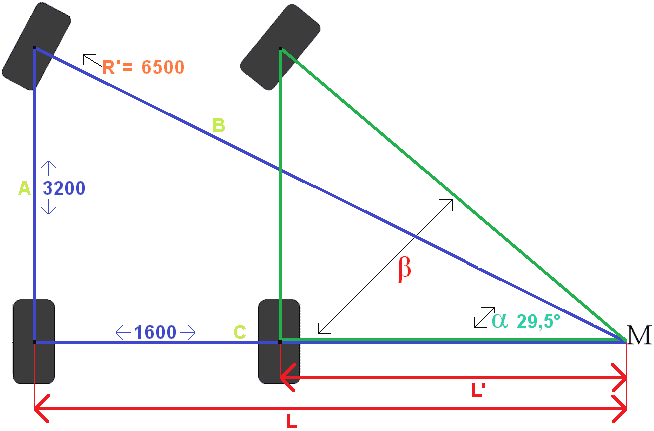
Sisestatud nurk:
Sõiduki pöördenurka saab arvutada mitmete auto andmete põhjal. Allpool on pilt, kus on arvutatud nurk α. Nurga β arvutamine on järgmine samm.
Lehel kurvis varvas välja Arvutamist selgitatakse sellel pildil üksikasjalikult.
Rollikeskus:
Rattavedrustuse oluline punkt on "rullikeskme" kontseptsioon. Veerekeskme asukoht mängib sõiduomadustes suurt rolli. Rulli keskpunkti asend määratakse tugiõlade asendi järgi. See on šassii projekteerimisel väga oluline kontseptsioon. Sõiduki langetamine mõjutab ka veeremise keskpunkti. Rollikeskuse kohta lisateabe saamiseks klõpsake siin.