Teemad:
- Kurvis varvas välja
- Esitatud nurkade arvutamine
Kurvis välja kõverdamine:
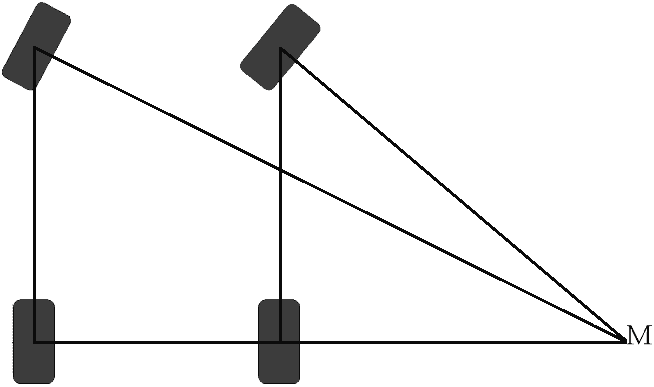
Esirattad ei juhi kurvides sama nurga all. Sisemine ratas teeb alati "teravama" pöörde kui välimine ratas. Pilt näitab, miks see nii on.
Pilt näitab, et esirataste jooned lõpevad nurgaga M. Nurk M on mõlema esiratta ühine pöördepunkt. Kui rattad pöörleksid sama nurga all (rattad on mõlemad täpselt samas asendis), jookseksid ka ratastelt tulevad jooned üksteisega paralleelselt lõpmatuseni. Nad ei leia kunagi ühist pöördepunkti M. Seetõttu on juhtimisomadused selles olukorras väga kehvad. Kogu seda põhimõtet nimetatakse "varvas välja painutamiseks". Kõik kaasaegsed autod on ehitatud selle funktsiooniga.
Siledatel pindadel, nt parkimismaja põrandal, on pööramisel kuulda rehvide kriginat. See on selle põhimõtte tõttu. Sisemine ratas, mis on teravama nurga all kui välimine, kogeb teatud määral libisemist. Seda nimetatakse juhtimisveaks. Rohkem infot roolivea kohta (ja graafik) leiab lehelt juhtimisviga.
Sellel lehel selgitatakse, kuidas saab arvukate andmete põhjal arvutada mõlema esiratta sisendnurki (kraadides).
Esitatud nurkade arvutamine:
Sisestatud nurkade arvutamiseks on vaja järgmisi sõiduki andmeid:
- Rööbastee laius
- Teljevahe
- Pöörderingi läbimõõt
- Roolisanga kaugus (sellel lehel jätame roolinuki kauguse võrdseks rööpmelaiusega)
- Rehvimõõt (olenevalt arvutusest. Sellel lehel kasutatakse arvutusteks rehvimõõtu, kuid arvutusi saab teha ka kuni põrkeraua nurkadeni. Samas lisandub veel nurki).
| Rööbastee laius = 1600 mm | Teljevahe = 3200 mm |
| Pöörderingi läbimõõt = 13,225m | Käepidemete vahe = rööbastee laius = 1600 mm |
| Rehvimõõt = 225 | L ja L' = tundmatu |
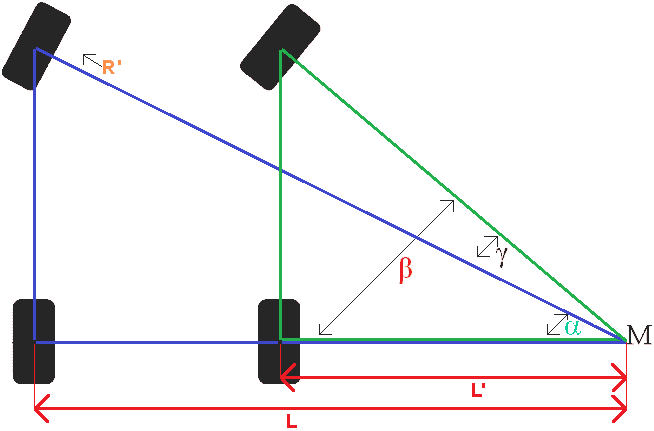
Sümbolite selgitused:
α = Alfa
β = beeta
γ = Gamma
Need tähed pärinevad kreeka tähestikust ja neid kasutatakse sageli nurkade arvutamiseks.
L = pikkus
L' = L koos “aktsentiga” lisana, mida sageli kasutatakse matemaatiliselt. Sama hästi oleks võinud öelda L2. Näiteks 3. L-l oli kaks rõhumärki: L.
Sama kehtib ka R kohta.
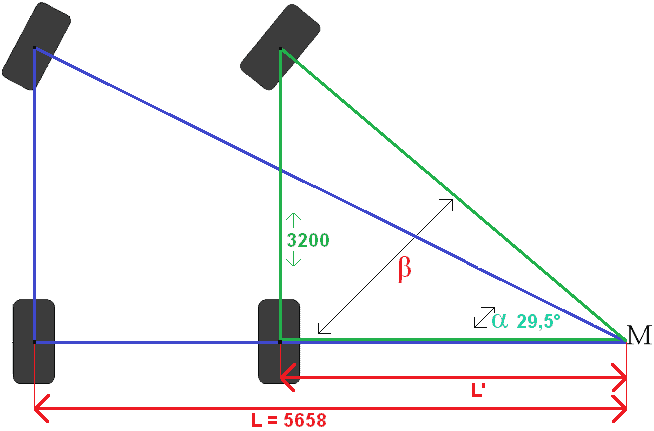
Nurgad Alfa, Beeta ja Gamma asuvad punktis M.
Nurk Alfa + Gamma = nurk beeta.
Kogu pöördering on 13,225 6612,5 meetrit. R on raadius, seega pool pöördering (XNUMX). Joonisel on antud R'. See R' ei ole kindel fakt. See tuleb arvutada, lahutades poole ribalaiusest. Teine võimalus on lahutada roolinuki kaugus, kuid sellel lehel kasutame: Rööpme laius = roolinuki kaugus. Lihtne arvutus on järgmine:
R = 6612,5 mm
R' = R – pool ribalaiust
R' = 6612,5 – (225 : 2)
R' = 6612,5 – 112,5
R' = 6500 mm
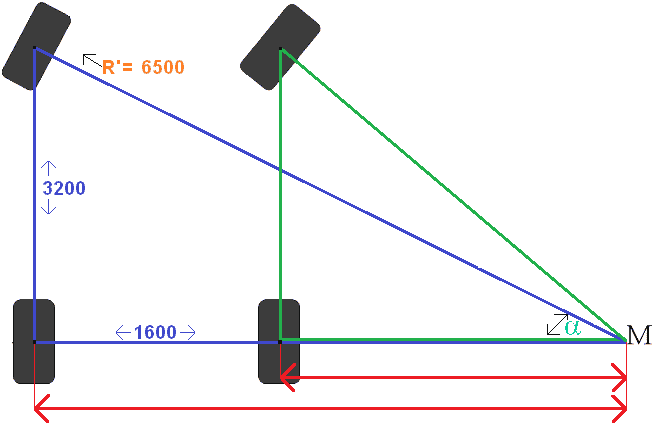
Täidame pildil R'. Seejärel arvutame siinusreegli abil nurga sin α (siinus Alfa). Seejärel arvutame ülejäänud nurgad Tangensi ja Pythagorase teoreemi abil.
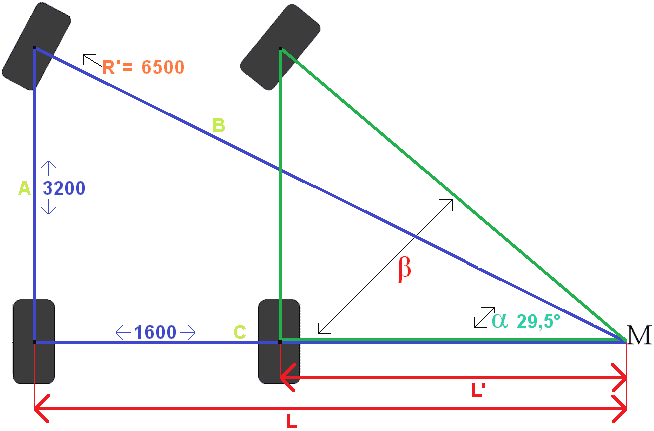
Nurga arvutamine siinuse abil:
Sin α = vastaskülg: kaldus külg
Sin α = Wb : R'
Sin α = 3200 : 6500
Sin α = 0.492
Inv Sin α = 29,5°
Arvutuse selgitus:
Tahame arvutada Sin α. Siinus on jagatud vastasküljele kaldus küljega (mnemooniline: SIN = SOS).
Wb = teljevahe = 3200 mm. Eelnevalt arvutasime R' = 6500 mm.
Seejärel jagame selle kokku; siis on Sin α = 0.492. Selle arvu seejärel nurgaks teisendamiseks sisestage kalkulaatorisse nupp sin-1 (tavaliselt vajutage esmalt Shift-nuppu ja seejärel Sin-klahvi), millele järgneb 0.492 või ANS-nupp. Nüüd tuleb nähtavale nurk 29,5 kraadi.
Sin α on nüüd teada. Nüüd tahame tegelikult arvutada tan β, kuid siis vajame pikkust L'. See tuleb kõigepealt välja arvutada. Seetõttu kasutame arvutuse L' vastust, et hiljem arvutada Tan β.
L' = L – rööpme laius.
Arvutame L Pythagorase teoreemi abil. Kolmnurga 2 külge on teada (6500 ja 3200). 1600 teine pool on rööpmelaius, mis jookseb rehvist rehvini, nii et see ei lähe arvesse. Arvutame alumise külje, mis kulgeb vasakust tagumisest rehvist ühise punktini M. Seetõttu hõlmab arvutus tervet sinist kolmnurka.
Pythagorase teoreem näeb välja selline:
A^2 + B^2 = C^2. (Märk ^ on "võimu" sümbol. See ütleb, et A ruudus + B ruudus = C ruudus. Siin sõnastame selle veidi teisiti.
Me nimetame pikkust 3200 A, 6500 B-ks ja madalaimat tundmatut külge C-ks:
C^2 = 6500^2 – 3200^2
C^2 = 42250000–10240000
C^2 = 32010000^2
Ruudu kõrvaldamiseks võtame arvust ruutjuure.
C^2 = √32010000
C = 5658 mm.
Külg C on tegelikult pikkus L.
Nüüd saab L' arvutada. Täispikkus L ja rööpme laius on teada, nii et neid kahte saab hõlpsasti üksteisest lahutada:
L' = L – rööpme laius
L' = 5658–1600
L' = 4058 mm
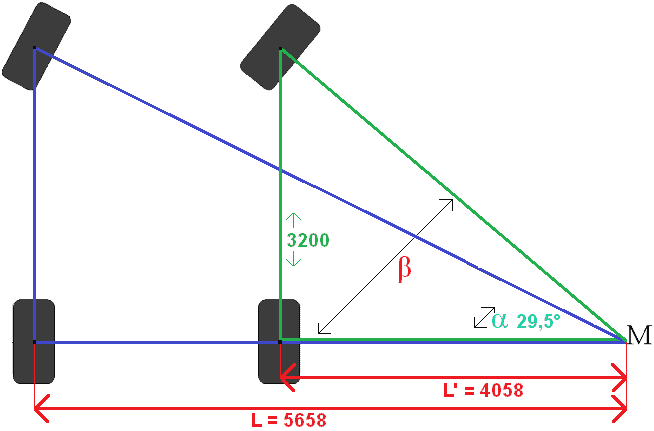
Nüüd on Wb ja L' teada. Kolmnurga kolmest küljest on teada kaks külge, nii et saate kolmanda külje leidmiseks kasutada puutujat Worden arvutatud:
Nurga arvutamine puutujaga:
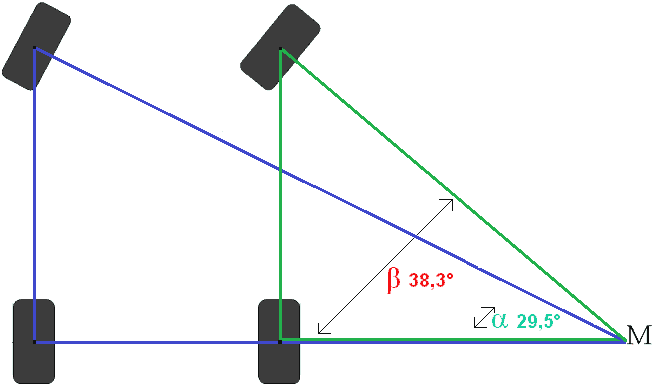
Tan β = vastaskülg: külgnev külg
Tan β = Wb : L'
Tan β = 3200 : 4058
Tan β = 0.789
Inv Tan β = 38,3°
Arvutuse selgitus:
Tahame arvutada Tan β. Puutuja jagab vastaskülje külgneva küljega (mnemoonika: TAN = TOA).
Wb = teljevahe = 3200 mm. Eelnevalt arvutasime L' = 4058 mm.
Seejärel jagame selle kokku; siis on Tan β = 0.789. Selle arvu seejärel nurgaks teisendamiseks sisestage kalkulaatorisse nupp tan-1 (tavaliselt vajutage esmalt Shift-nuppu ja seejärel Tan-klahvi), millele järgneb 0.789 või ANS-nupp. Nüüd tuleb nähtavale nurk 38,3 kraadi.
Nüüd on mõlema esiratta pöördenurgad välja arvutatud. Vasak esiratas on 29,5° ja parem esiratas 38,3° nurga all. See tähendab, et mõlema ratta roolinurga erinevus on 8,8°. Kurvis vasakule tekib sama roolinurk sama pöördenurgaga.
Lehel ratta geomeetria kirjeldatakse mitut rattaasendit.