Teemad:
- Määrake ja paigaldage mootori juhtimissüsteemi andurid
- Väntvõlli asendi andur
- Pulsiratas
- Kaardiandur
- Jahutusvedeliku temperatuuri andur
- Lambda andur
Määrake ja paigaldage mootori juhtimissüsteemi andurid:
Mootori juhtimissüsteem nõuab mitmeid andureid. Andurid on süsteemi "sisend". Andurid muudavad füüsilise suuruse elektriliseks signaaliks, mida saab töödelda arvutiga, antud juhul MegaSquirtiks.
MegaSquirti monteerimisprotsess peab arvestama mootorile paigaldatavate komponentidega, sest MegaSquirti struktuur võib erineda.
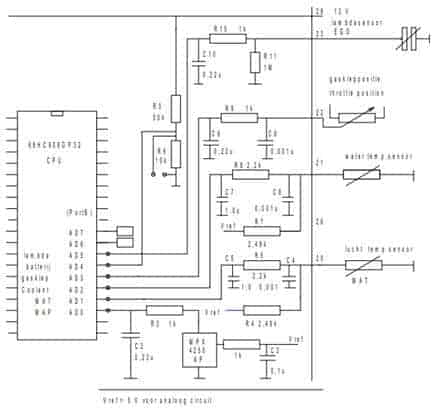
Joonisel on kujutatud erinevad anduriahelad, milles need komponendid asuvad. Joonisel kujutatud sisendsignaalid tulevad lambdaandurilt, gaasihoova asendiandurilt, jahutusvedeliku temperatuuriandurilt ja õhutemperatuuri andurilt.
Skeemil on lisaks anduritele ka hulk takisteid ja kondensaatoreid. Nende komponentide koostis moodustab filtrid; Need filtrid püüavad häiresignaale ja müra. Kui anduri signaal on müra tõttu moonutatud, võivad sellel olla suured tagajärjed täiturmehhanismide juhtimisele ja seega ka mootori tööle.
Väntvõlli asendi andur:
Mootori juhtimissüsteemi oluline sisend on väntvõlli kiirus.
Väntvõlli kiirust mõõdetakse väntvõlli asendianduri ja impulsiratta abil. Väntvõlli asendianduril on kaks olulist funktsiooni:
- Väntvõlli kiirust saab määrata signaali sageduse alusel;
- Puuduv hammas impulsirattas näitab väntvõlli asendit, milles silindrite 1 ja 4 kolvid on paar kraadi enne TDC-d.
Mootori pöörlemissagedus mõjutab pihustite ja süüte juhtimist. Puuduv hammas 36-1 impulsirattas on oluline süüte- ja süstimisaegade määramiseks. Kiiruseandurina otsustati kasutada Halli andurit, mitte induktsioonimpulssi generaatorit. Induktiivne andur genereerib vahelduvpinge, mis tuleb MegaSquirt kontrolleris alalispingeks teisendada. Halli andur genereerib ruutlaine pinge, mida võimendatakse sisemise või välise tõmbetakistiga pingeni 5 või 12 volti. See muudab Halli anduri sobivamaks usaldusväärse signaali moodustamiseks. See valik tuleb teha eelnevalt enne MegaSquirti kokkupanemist; mõlemad andurid nõuavad erinevat vooluahela ehitust.
Pulsiratas:
Väntvõlli asendiandur mõõdab mootorile paigaldatud impulssratta õhupilu muutust. Land Roveri mootoril pole aga algselt väntvõlli asendiandurit ja seetõttu puudub ka impulssratas. Impulssratas tuli seega tagantjärele paigaldada. Pulsiratta asukoha ja asukoha üle on palju mõelnud. Võimalused olid:
- 36 hambaga ketas, mis kinnitatakse väntvõlli rihmaratta välisküljele klambri või poltühenduse abil.
- Väntvõlli praeguse rihmaratta reguleerimine hammaste freesimise teel rihmarattalt.
Levinud on 36-1 või 60-2 impulsiratta kasutamine. 60-hambalist impulssratast kasutatakse peamiselt suurema läbimõõdu puhul. 36-1 sobib kasutamiseks oma hambalaiuse tõttu. On väga oluline, et impulsirattal oleks võimalikult väike kõrguskäik. Kõrguse muutus tähendab anduri ja impulsiratta hammaste vahelise magnetvälja muutumist. Sellel võivad olla negatiivsed tagajärjed mootori tööle. Seda tuleb loomulikult vältida. Seetõttu oli väntvõlli rihmaratta reguleerimine eelistatavam. Olemasoleva väntvõlli rihmaratta välisserv on töödeldud freespingil. Sälgud on tekkinud materjali eemaldamisega. Ülejäänud 36 hammast võimaldavad anduril mõõta magnetvälja muutusi. Võrdluspunkti jaoks on hammas ära lihvitud. Alloleval pildil on näha töödeldud väntvõlli rihmaratas.
Lihvitud hammas on nähtav impulsiratta ülaosas, otse anduri all. Kui väntvõll on selles asendis, ei tähenda see seda, et silindrite 1 ja 4 kolvid on TDC-s, vaid et need kolvid on 90 kraadi enne TDC-d, mis vastab 9 hambale (360/36). Hetkel, kui puuduv hammas mööda läheb, saab MegaSquirt signaali, et varsti peaks süüde toimuma. Sellest hetkest alates arvutatakse välja, millal süütepool peaks aktiveeruma. Erinevate töötingimuste korral määratakse selle võrdluspunkti alusel ka eelsüüteaeg.

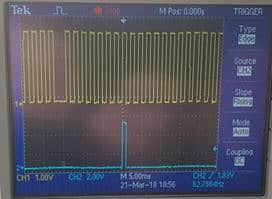
Ostsilloskoobi pilt (vt pilti) näitab väntvõlli signaali (ülemine) võrreldes süütepooli juhtsignaaliga (all). Juhtimpulss süütepoolile moodustub kaheksanda hamba juures pärast puuduvat hammast. Kui mootor töötab tühikäigul, liigutatakse süüdet 10 kraadi võrra, mis teeb 1 hamba. See vastab eemaldatud hamba ja tegeliku ülemise surnud punkti vahelisele 90 kraadile (9 hammast).
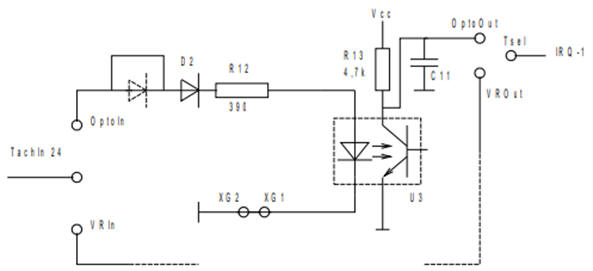
Halli anduri ahela kokkupanemiseks MegaSquirti tuleb paigaldada kondensaator C11, takistid R12 ja R13, diood D2 ja optoliitmik U3 (vt joonist allpool). Halli anduri signaal sisestatakse joonisel 105 olevale skeemile jaotises "Opto in". Signaal jõuab dioodi ja takisti kaudu nn optosidistisse. See komponent on tähistatud katkendliku joonega. Opto-sidur on väike integraallülitus, milles vasakpoolne LED juhib põledes paremal pool olevat fototransistori. Opto-sidurit võib vaadelda kui lülitit, millel pole mehaanilisi või elektrilisi ühendusi juht- ja lülitusosade vahel.
Kui opto-siduri transistor juhib, võib Vcc-lt maapinnale voolata väike vool. Sel hetkel on valikul “Opto Out” pinge 0 volti. Kui transistor ei juhi, siis takistis R13 ei ole voolu ja seega ka pingelangust. "Opto out" pinge on siis 5 volti.
Opto-siduri abil tehakse dioodi ja fototransistori vahel galvaaniline eraldus. Ohtlikud häirepinged hoitakse seega mikrokontrolleri vooluringist väljas, kuna läbilöögipinge on tavaliselt suurem kui 5 kV.
MAP sensor:
MAP-andur (kollektori absoluutrõhuandur) mõõdab rõhku sisselaskekollektoris. MegaSquirt kasutab seda rõhku, mootori pöörlemiskiirust ja sisselasketemperatuuri mootorisse siseneva õhuhulga arvutamiseks. Land Roveri mootoriga mõõdetakse absoluutset rõhku (välisõhu rõhku) või alarõhku. See on vabalthingav mootor, mis imeb endasse õhku. Turboga varustatud mootorid peavad toime tulema sisselaskekollektori ülerõhuga. MAP-anduri mõõtepiirkond jääb tavaliselt vahemikku 0,2–1.1 baari.
Sisselaskekollektori rõhk koos drosselklapi avanemisnurgaga (mida mõõdetakse drosselklapi asendianduriga) ja mootori pöörlemiskiirus võivad määrata mootori koormuse. MAF-anduri (Manifold Air Flow) puudumise tõttu arvutatakse sissetõmmatava õhu kogus mootori andmete ja sisselaskekollektori alarõhu põhjal. MAF-andurit otsustati mitte kasutada, kuna signaal on vähem usaldusväärne, kuna see pole mootori jaoks mõeldud. Seadete sobitamine sisselaskekollektori omadustega on keeruline. Selleks on vaja palju parandustegureid.
Kasutatav MPX4250AP MAP andur on näidatud joonisel. MegaSquirt trükkplaat on standardvarustuses seda tüüpi MAP-anduri ühendusvõimalustega. See andur on standardvarustuses ka ehituskomplektis. Sissepritsitava kütuse kogus sõltub muuhulgas olemasoleva õhu hulgast, sest püütakse saavutada stöhhiomeetrilist segamissuhet (14,68 kg õhku 1 kg kütuse kohta). Oli võimalus mitte kasutada nii MAF-i kui ka MAP-andureid. Sissetõmmatava õhu kogus määratakse siis vastavalt nn alfa-N regulatsioonile. Arvesse võetakse gaasiventiili asendit, mis on määrav õhuhulga jaoks. Kuid see on vähem täpne kui MAP-andur, mistõttu seda ei valitud. Selles projektis kasutatakse gaasihoovastiku asendiandurit ainult kiirenduse rikastamiseks.

Jahutusvedeliku temperatuuriandur:
Klassikalises seadistuses pole mootoriplokil temperatuuriandureid. Mootor on standardvarustuses bimetalliga, mille funktsioon on lülitada sisse armatuurlaua valgustus, kui jahutusvedeliku temperatuur on liiga kõrge. Kuna mootori juhtimissüsteem arvestab jahutusvedeliku ja sisselaskeõhu temperatuuri, otsustati NTC takistid tagantjärele paigaldada. NTC takistil on negatiivne temperatuuritegur. See tähendab, et takistuse väärtus väheneb temperatuuri tõustes. Valitud jahutusvedeliku temperatuuriandur on andur, mille takistus on 2,5 kilooomi temperatuuril 25⁰ Celsiuse järgi. Takistuse muutus on suurim kõige olulisemas temperatuurivahemikus. Õige temperatuuri arvutamiseks tuleb kaardistada NTC takistuse omadused.
Takistuse muutus on suurim, kui temperatuurivahemik on vahemikus 0 °C kuni 60 °C. Seda on näha tunnuse käigust; nimetatud temperatuurivahemikus toimub takistuse vähenemine ligikaudu 5kΩ, samas kui T ≥ 60⁰C juures takistus peaaegu ei vähene. Mõnel juhul on soovitav mõõta ka temperatuure üle 60°C. Selle võimaldamiseks saab sisemise nihketakisti teatud temperatuuril lülitada erineva väärtusega eeltakisti vastu. See annab kaks NTC omadust. Kuid selles projektis kasutatakse jahutusvedeliku temperatuuri ainult külmkäivituse rikastamiseks, mida ei kasutata peaaegu üle 60 °C.
Madalad temperatuurid on ka kõige huvitavamad; siin toimub külmkäivituse rikastamine; pihusti aktiveeritakse kauem, kui mootor on külm. Kui mootor on piisavalt soojenenud (T ≥ 60⁰C), toimub rikastumine üha vähem. Alates T = 90 ⁰C töötab süstimisstrateegia vastavalt võrdlusväljas seatud väärtustele. Viiteväli on sisestatud vaikeväärtus. Välised tegurid, nagu külmkäivituse rikastamine madalal temperatuuril, moodustavad selle standardväärtuse parandusteguri. MegaSquirt ei võta enam arvesse jahutusvedeliku temperatuuri.
Lambda andur:
Heitgaasi on paigaldatud lambda andur (sensor), mis mõõdab õhu/kütuse suhet heitgaasides. Lambda-anduril on oluline ülesanne "häälestada" mootori juhtimist hilisemas etapis, täites AFR ja VE tabelid. Ideaalsest segamissuhtest ning rikastamise või vaesustamise kasulikkusest ja vajadusest ülevaate saamiseks määratletakse esmalt stöhhiomeetriline segamissuhe, rikastamine ja ammendumine.
Stöhhiomeetriline segamissuhe näitab õhu ja kütuse suhet, milles kasutatakse kogu õhust saadavat hapnikku. See on nii suhtega 14,68:1 (ümardatuna 14,7 kg õhku 1 kg bensiini kohta). Seejärel räägime λ = 1-st.
Lambda väärtus võib erinevates töötingimustes erineda:
- Rikastamine: λ < 1;
- Vaesustada: λ > 1.
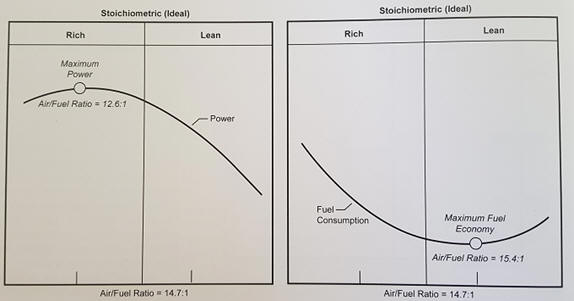
Rikastamine väärtuseni λ = 0,8 tähendab, et kehtib segamissuhe 11,76 kg õhku 1 kg bensiini kohta. Seega jääb 1 kg kütuse põletamiseks vähem õhku. Segu rikastamine või tühjendamine peab alati jääma plahvatuspiiridesse. Rikastamine toimub siis, kui mootor peab andma rohkem võimsust. Rikkam segu annab ka jahutuse. Lahja segu annab seevastu parema kütusekulu. Alloleval pildil on kaks graafikut, mis näitavad maksimaalset võimsust ja väikseimat kütusekulu.
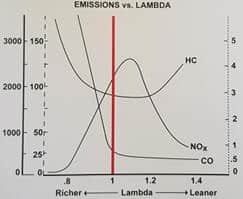
Lambda väärtus ei mõjuta mitte ainult võimsust ja kütusekulu, vaid ka heitgaase. Rikkalikum segu tagab madalama NOx sisalduse, aga ka suurema CO ja HC emissiooni. Lahjema segu korral on kütuseosakesed üksteisest kaugemal, mistõttu põlemine ei ole enam optimaalne; mille tulemusena suurenevad ka HC heitkogused. Alloleval pildil on lambda väärtusega seotud heitkogused. Katalüsaatori kasutamisel on soovitav jälgida, et sissepritse oleks pidevalt vahelduv rikkaliku ja lahja vahel. Rikkas segus tekib hapnikuvaeguse tagajärjel CO, millega katalüsaator vähendab NOx. Lahjas segu sisaldab hapniku ülejääki, mis oksüdeerib CO ja HC.
Lambda-andureid on kahte tüüpi; hüppeandur ja lairibaandur. MegaSquirt toetab mõlemat tüüpi. VE tabeli seadistamisel aga hüppeandur ei sobi ja seetõttu tehti valik lairibaanduri kasuks. VE tabel seadistatakse, kohandades VE väärtusi mõõdetud AFR-i järgi. Kuigi VE väärtusi saab põhimõtteliselt sisestada arvutuste abil ja suures osas pöördemomendi kõvera põhjal, jääb AFR kiiresti hüppeanduri ulatuse kaugemale. Lairibaandur pakub lahendust oma suure mõõteulatuse tõttu; see suudab mõõta AFR-i vahemikus 8,0 kuni 1,4. Segu koostis jääb mootori töötamise ajal peaaegu kõigil juhtudel sellesse mõõtepiirkonda, seega sobib lairiba andur VE tabeli seadistamiseks. Häälestamine ilma lairibaandurita on praktiliselt võimatu.
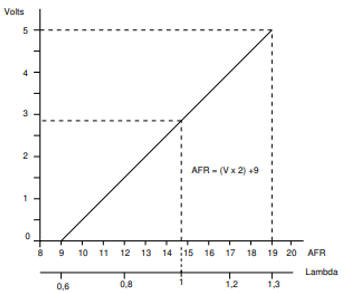
MegaSquirtil puudub sisemine lambda kontroller. Kui lairibaanduri omadused on teada, saab need TunerStudio programmis tabelisse sisestada. Muudel juhtudel on vaja välise kontrolleriga lairibaandurit. Välise kontrolleri poolt on väljundpinge muudetud lineaarseks. Kontrolleri väljundpinge MegaSquirtile on vahemikus 0 kuni 5 volti, kusjuures lambda väärtuse ja pinge vaheline seos on lineaarne. Pinge väärtus teisendatakse MegaSquirtis lambda väärtuseks. Joonisel on kujutatud graafik lineaarse gradiendiga.
järgmine: Täiturmehhanismid.