Teemad:
- Päikesevarustus, kandur ja rõngasratas
- Automaatkäigukast
- Planetaarülekandesüsteemi ülekanded
- Arvutage esimese käigu ülekandearv
- Arvutage teise käigu ülekandearv
- Arvutage kolmanda käigu arv
Päikesevarustus, kandur ja rõngasratas:
Planeedi hammasrataste süsteem koosneb vähemalt ühest hammasrataste komplektist, millest igaühel on päikese hammasratas, kandur ja rõngashammas. Seetõttu on vaja elementaarseid teadmisi planetaarülekandesüsteemi töö kohta (nagu päikesekäigu pööramine, satelliidi hammasratastega kandur ja rõngasratas, vt lk. automaatkäigukast).
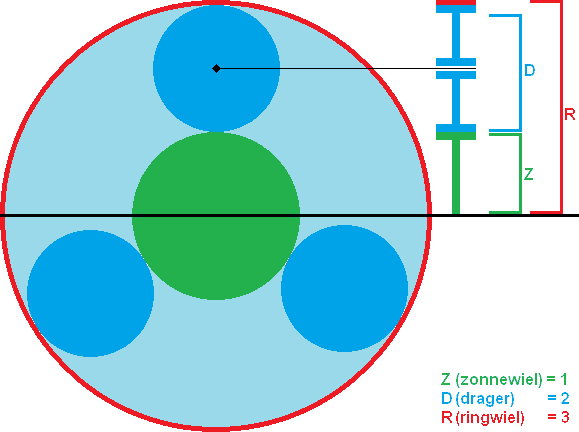
Allpool on pilt hammasrataste komplektist, kus päikese hammasratas on roheline, satelliidi hammasratastega kandur on sinine ja rõngasratas on punane. On selgelt näha, et käigukast on jagatud kaheks. Arvutamine toimub võrranditega, seega pole vahet, kui kõik on jagatud kahega. Proportsioonid jäävad ju samaks.
Sellel lehel arvutame edasi suhete Z, D ja R abil. Erinevaid planeedisüsteeme ühendavaid jooni järgides saab kõigi Z, D ja R vahekordade abil määrata vastava käigu koguülekandearvu.
Automaatkäigukast:
Tavaline automaatkäigukast töötab erinevate planetaarülekandesüsteemide vahel, vt peatükki automaatkäigukast.
Allpool on skemaatiline kujutis neljast automaatkäigukasti planetaarkäigusüsteemi komplektist. Edasi- ja üks tagurpidikäigu jaoks on olemas kolm süsteemi. Punane joon näitab jõudude suunda läbi automaatkäigukasti; vasakult (mootori pool koos pöördemomendi muunduriga) läbi kogu planeedisüsteemidega osa (mustad jooned) kuni sõukruvi võlli ühenduskohani. Kui vaatate tähelepanelikult käigukasti süsteeme, näete, et ülaltoodud pilt on neist tuletatud. Käigukastis kasutatakse nelja süsteemi, millest igaühel on Z, D ja R (päikese hammasratas, kandur ja ringkäik).

Planeediülekandesüsteemid on sümmeetrilised keskjoone kohal ja all. Teistmoodi ei saa, sest salong pöörleb sõidu ajal. Et saada ülevaade sellest, mis juhtub käigu sisselülitamisel, on alloleval pildil planeedisüsteemi juhitavad osad samuti punasega esile tõstetud:

Ülaltoodud pildil on käik 1 sisse lülitatud. Käigu 1 sisselülitamiseks peab sidur olema sisse lülitatud. See link on näidatud sinisega. Suletud haakeseadise ja planeedisüsteemi ühe juhitava küljega peab ka üks osa pöörlema. Sel juhul määravad osade mõõtmed ülekandearvu (mõelge väikesele sisendülekandele ja suurele väljundülekandele; suur hammasratas pöörleb siis aeglasemalt. Kui suurel hammasrattal oleks kaks korda rohkem hambaid kui väikesel hammasrattal, siis suhe oleks 1:2).
Põhimõtteliselt kehtib see ka automaatkäigukasti kohta; rõngas-, päikese- ja satelliithammasrataste mõõtmed on kõigis neljas süsteemis erinevad. Nüüd võite ilmselt ette kujutada, et kui teine sidur on pingestatud (nt vasakpoolne süsteem), on väljundvõlli kiirus muutunud.
Sellel lehel on pildid, selgitused ja arvutused selgitatud, kuidas automaatkäigukasti planetaarkäigusüsteeme sõidu ajal vahetatakse.
Planetaarülekandesüsteemi ülekanded:
Nüüd vaatame käigukasti ülemist poolt (kuna kast on ülalt ja alt sümmeetriline, vaata allolevat pilti). Selle pildi põhjal määrame ülekanded lehel hiljem. Süsteemide kohal on kirjas, mis numbriga süsteem on; 1 kuni 3 ja süsteem R (tagurpidi).
Igal galaktikal on oma Z, D ja R. Seda pildil ei kuvata, kuid kui vaatate uuesti selle lehe ülaosas olevat pilti, tunnete selle ära. See loetakse teadaolevaks hiljem sellel lehel.
Pildi alumises vasakus servas näete sidet “K4”, see ühendus tagab süsteemi kahe külje samaaegse ühendamise; süsteem 3 on ühendatud süsteemidega 1 ja 2. Muid ühendusi pole suletud, seega on kogu süsteem "blokeeritud". Mootori pöörlemissagedus edastatakse 1:1 sõiduki ratastele, ilma ülekandearvuta; Me nimetame seda hinnaks otseseks. See on neljandal käigul.
Manuaalkäigukastiga autodel on sageli ka neljas käik otseveoga. Ka siin edastatakse mootori pöörlemissagedus 1:1 ratastele.
Sisendvõlli (mootori või pöördemomendi muunduri) ja väljundvõlli (sõiduki) kiiruste erinevust nimetatakse ülekandearvuks.

Esimene käik on sisse lülitatud.
Kinnitades süsteemi I kanduri (kasutades haakeseadet K1), saab jõudu päikeseülekandelt kandurile üle kanda. Kandur on sõidukiga ühendatud, nii et mootori ja käigukasti vahel on nüüd otseühendus. Osade mõõtmed määravad ülekandearvu (sellest lähemalt hiljem).
Punane joon näitab jõu progresseerumist. Roheline joon näitab, millised muud komponendid töötavad, kuna see on otse punase joonega ühendatud. Need osad küll pöörlevad, kuid kuna sidur pole pingestatud, ei juhtu nendega midagi. Nad lihtsalt jooksevad tühikäigul. Sinine joon näitab, mis on fikseeritud, kui sidestus K1 on pingestatud. Seejärel pole fikseeritud mitte ainult süsteemi 1 kandur, vaid blokeeritakse ka süsteemi 3 kandur ja süsteemi R päikese hammasratas.

Nagu selgitatud, aktiveeritakse sidur K1 esimese käigu sisselülitamisel. Teisele käigule lülitamisel lülitatakse sidur K1 välja ja teine sidur saab pinget. Seda on näha tabelist.
Teisele käigule lülitamisel lülitatakse sidur K2 pingesse. Seejärel fikseeritakse süsteemi 2 hammasratas. Kuna süsteemi 2 päikese hammasratas on fikseeritud ja päikese hammasratas on käitatav, hakkab kandur pöörlema. See kandur juhib omakorda süsteemi 1. Süsteemis 1 ei blokeerita seekord hammasratast, vaid seda juhib teine süsteem. Sel juhul on väljundkiirus (sõiduki joon) seetõttu väiksem kui esimese käigu vahetamisel.

Seda selgitatakse sellel lehel piltide, selgituste ja arvutustega lähemalt.
Esimese käigu ülekandearvu arvutamine:
Alloleva tabeli järgi on link K1 suletud. Rõngasratas on seega lukustatud. Mootori liikumapanev jõud liigub läbi päikesekäigu ja kanduri kaudu sõidukisse. Samuti on antud suhtarvud, nimelt 1,00 süsteemi 3,00 päikesehammasrattale ja 1 rõngashammasrattale. Sellega me arvutame.
Planeediülekandesüsteemide ülekandearvu arvutamise põhivalem on järgmine:
ω tähistab omega ja on nurkkiirus keerates.
Kuna me arvutame süsteemiga 1, paneme kõige järele 1. Muudame seda numbrit järgmiste süsteemide jaoks. Eriti mitme süsteemi puhul (kus üks süsteem ajab teist) tuleb seda niimoodi tähele panna, sest muidu läheb asi väga segaseks.
Allpool on esimese käigu skeem. Selguse huvides on Z (päikesekäik), D (kandur) ja R (rõngaskäik) joonistatud sinisega.


Nüüd täidame esimese süsteemi põhivalemi. Oomegasid pole teada ja kandja seisab paigal. Seega ei saa me selle jaoks midagi täita. Z1 ja D1 on teada, seega täidame need ära. R1 on paigal, nii et kriipsutame selle maha. Me ei lisa valemile midagi.
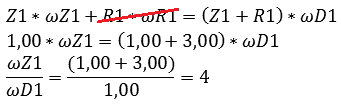
Nüüd näete, et esimese käigu ülekandearv on 4.
Autotehnikas seda kunagi ei juhtu, see oleks alati veidi üle või alla 4, sest muidu puudutavad käigud alati samadel pindadel (lisakulumine). Kuid siin on näitena lihtsam arvutada. Nüüd on ka näha, et oomegasid teatakse!
ωZ1 = 4
ωD1 = 1
Need oomegasid on süsteemi telgede nurkkiirused. Esimesel käigul pole oomegasid eriti tähtsad, kuid kaheveoliste süsteemide arvutamisel (nagu teisest käigust selgub), on see oluline.
Arvutage teise käigu ülekandearv:
Teise käigu ülekandearvu arvutamisel tuleb arvestada, et esimene süsteem on kahekäiguline; süsteemi 1 päikeseülekannet käitab mootor ja kandurit süsteem 2. Selle tulemuseks on nüüd erinev sõiduki kiirus kui olukorras, kus ringkäik oli paigal (näiteks esimese käiguga).

Arvutamisel alustame alati ainult juhitavast süsteemist. Sel juhul on tegemist süsteemiga 2, kuna seda käitab mootor ainult päikeseülekande kaudu.
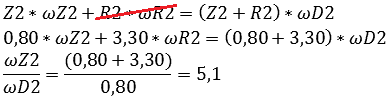
Teise süsteemi poolt teostatav ülekanne on 5,1. See ei ole ülekanne mootori ja rataste vahel, vaid mootori ja süsteemi 1 vahel. Nüüd arvutame süsteemi 1 ülekandearvu süsteemi 2 andmetega, sest oomegasid on nüüd teada:
ωZ2 = 4,1
ωD2 = 0,8
Kui vaatate nüüd diagrammi, näete, et süsteemide 1 ja 2 päikeseülekanded on omavahel ühendatud. Süsteemi 2 kandur ja süsteemi 1 hammasratas on samuti omavahel ühendatud. Ühendatud osade oomegasid on samad, nii et võime siis öelda:
ωZ2 = ωZ1 = 4,1
ωD2 = ωR1 = 0,8
On väga oluline, et seda hoolikalt vaadataks! Järgige alati diagrammi jooni.
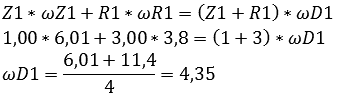
Nüüd sisestame need oomegad süsteemi 1 arvutusse.
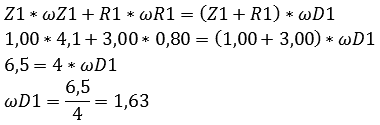
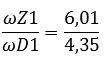
Nüüd saame määrata lõpliku ülekandearvu, jagades sisend-oomega väljundi oomega-ga. Kui vaatame diagrammi, näeme, et päikeseülekandesüsteemi 2 oomega on sissetulev ja kandesüsteemi 1 oomega väljub.
2. käigu summaarne ülekandearv on seega 2,52.
Arvutage kolmanda käigu arv:
Kolmanda käigu arvutamisel tuleb arvestada, et kõik kolm süsteemi töötavad koos. Alustage alati ühe ajamiga süsteemist. Sel juhul on see kolmas:

Süsteemi 3 päikesekäik on fikseeritud, seega ei osale. Seejärel sisestage ülejäänud väärtused:
Sellega saame:
Seejärel läheme süsteemi 2 juurde. Sisestate süsteemi 3 jaoks tuntud oomegasid 2. süsteemi arvutamisse:
Nüüd läheme süsteemi 1 juurde. Ka siia sisestatakse teadaolevad oomegasid:
Lõpuks saame:
See tähendab, et kolmanda käigu kogu ülekandearv on 1,38.
Neljanda ülekandearvu arvutamine:
Neljandal käigul on sidur K4 suletud. See tähendab, et süsteemide 1, 2 ja 3 päikeseülekanded on samaaegselt mootoriga ühendatud. Nüüd on kogu süsteem blokeeritud. Kõik oomegasid on võrdsed.
Kui kõik oomegasid on võrdsed, pole ülekandearv võimalik. Mootori pöörlemiskiirus edastatakse otse ratastele. Me nimetame seda hinnaks otseseks.