Teemad:
- Üldine parkimisabi
- Parkimiskauguse kontroll
- Tagurduskaamera
- Külgvaade
- Ümbritsev vaade
- Parkimisabi
Üldine parkimisabi:
Parkimisabi sisaldab süsteeme, mis abistavad juhti parklasse sisenemisel ja sealt väljumisel. Kõige tuntum parkimisabisüsteem on “parkimise kauguse kontroll”, lühendatult PDC. See süsteem teavitab sõidukijuhti kaugusest tagumise autoni või ulatuslike süsteemide korral ka sõiduki ette. Sellel lehel kirjeldatakse kaasaegseid tehnoloogiaid, mis on kas pargikauguse kontrolli laiendus või täiesti eraldiseisev abisüsteem.
Parkimiskauguse juhtimine:
Parkimiskauguskontroll (PDC) on kauguse hoiatussüsteem, mis mõõdab signaale parkimiskohtadele sisenemisel ja sealt väljumisel ning annab teavet kauguse kohta takistuseni. Ultraheliandurid on tagumises põrkerauas ja sageli ka eesmises põrkerauas (vt pilti). Need kiirgavad väga kõrge sagedusega helilaineid, mis on inimkõrvale märkamatud. Need ultraheli sagedused peegelduvad lähedalasuvatelt objektidelt ja on sensori poolt vastu võetud. Andur mõõdab aega nende signaalide saatmise ja vastuvõtmise vahel. Mida lähemal objekt on, seda kiiremini põrkub signaal tagasi. Andur lööb selle kinni ja edastab selle PDC juhtseadmele (arvutile).
See arvuti suudab selle edastada juhile helisignaalidena ja nii pildi- kui helisignaalidega. Seejärel kostab piiksu, mis muutub objekti lähenedes aina kiiremaks. Umbes 30 cm kaugusel annab see pideva piiksu, mis annab teile kui juhile teada, et peate peatuma.

Kaasaegsed pardaarvutid on sageli varustatud valikuga, kus ekraanil näidatakse kaugust objektist. PDC andurid on samad; juhtseade arvutab anduritelt saadud andmed ja töötleb need teabeks, mida ekraan saab kuvada.
Alloleval pildil on kujutatud PDC juhtseade (ECU). See hall ruut sisaldab mikrokontrollerit, võimendit ja JA-väravat. Mikrokontroller edastab ruutlaine pinget sagedusega ligikaudu 40 kHz (must). Perioodiliselt väljastatakse ka madala sagedusega plokkpinge (punane/sinine). JA-värav võtab vastu kaks plokipinget. Kui mõlemad pinged on kõrged, on väljundpinge (AND-väravast paremal) kõrge. Kui üks kahest pingest on madal, muutub ka väljund madalaks. Väljundpinge saadetakse tagasi mikrokontrollerile ja PDC anduris olevale saatjale. Saatja väljastab ultraheli signaali kiirusega ligikaudu 300 m/s. Kui läheduses on objekt, siis ultraheliheli peegeldub ja vastuvõtja registreerib selle. Me nimetame seda "triangulatsiooniks". Vastuvõtja saadab moodustunud plokksignaali ECU-sse. Plokksignaali võimendatakse võimendi abil ja seejärel töödeldakse mikrokontrolleri poolt.
Aeg AND-väravast väljundsignaali saamise ja võimendi vahel on kauguse mõõt objektist. Mida väiksem on kaugus PDC anduri ja objekti vahel, seda lühem on aeg. Mikrokontroller juhib helisignaali või suhtleb teiste juhtseadmetega CAN-siini kaudu.
Allolev lülitusskeem (VAG) näitab sidet juhtplokkide vahel, sisendeid lülititele ja väljundeid muuhulgas helisignaalile.
PDC juhtseade (J446) võtab CAN-siini kaudu vastu sõidukiiruse ja tagurdussignaali. PDC juhtseade saadab moduleeritud plokipinge ühenduse T12/11 kaudu kaabliühendusele (X86 tagumises põrkerauas), mis on ühendatud kõigi PDC anduritega (G203, G334, G335 ja G206). Igal PDC anduril on oma signaalijuhe (kontakti 2 kaudu) ECU-sse. Lisaks on iga anduri maandus ühendatud maanduskeevisõmblusega (352).
Kui üks või mitu andurit tuvastavad objekti, aktiveerib juhtseade helisignaali (H15). Olenevalt kaugusest objektini kostab sumist kiiremat või aeglasemat katkendlikku helisignaali.

Tänu suhtlusele diagnostikaliidesega (J533) on võimalik teostada järgmisi diagnostikafunktsioone:
- päring veamälu
- Reguleerige juhtseadme kodeerimist (nt pärast süsteemi laiendamist PDC anduritega ees või pärast veokonksu paigaldamist)
- reguleerige sumisti helitugevust
- Uurige mõõdetud väärtuste plokke muuhulgas kõigi andurite kauguse kohta objektini, arvutatud kauguse ning saatja ja vastuvõtja stabiliseerimisaja kohta.
Tagurduskaamera:
Parkimisabi saab lisaks pargikauguse kontrollile varustada ka tagurduskaameraga. Hetkel, kui juht paneb sõiduki tagurduskäigule või vajutab salongi nuppu, aktiveeritakse sõiduki tagaosas olev kaamera. Tavaliselt näitab pilti raadio või pardaarvuti ekraan.
Alloleval pildil on BMW ekraan, mille kujutis on sõiduki taga. Kaamerapildist paremal on sõiduk, mille ees ja taga on kolmeosaline võrk; See näitab kaugust objektist, mille PDC andurid registreerivad.
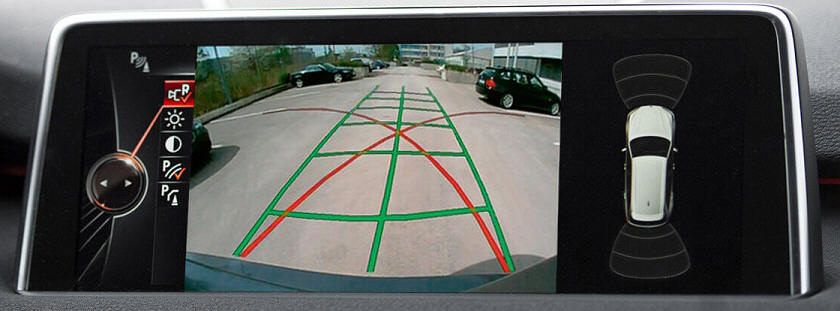
Tagurduskaamera pildil on näha punased ja rohelised jooned. Punased jooned näitavad võimalikku suunda, kuhu sõidukit saab juhtida; Maksimaalse juhitavuse korral järgivad rattad kurvi välisküljel olevat punast joont. Roheline ruudustik järgib juhtraua pööramise suunda; sel hetkel on esirattad otse ees. Kui juht rooli keerab, näitavad rohelised jooned tegelikke sõidujooni. Roolinurga andur registreerib rooli asendi.
Tagurduskaamera on mõnikord selgelt nähtaval ja asub sageli numbrimärgi ja/või tagaluugi avamise käepideme lähedal. Mõnikord otsustavad tootjad paigaldada kaamera silma alt ära. Alloleval pildil on VW Golfi tagurduskaamera, kus elektrimootor kallutab VW embleemi, et kaamerat väljapoole liigutada. Embleem volditakse automaatselt tagasi, kui uuesti edasi sõidate. Kaamera ei ole mitte ainult vaateväljas, vaid ka objektiiv määrdub kiiremini.

Külgvaade:
Kui tagurdate kahe sõiduki või suurte objektide vahel, peate vasakule ja paremale vaatamiseks natuke ettepoole sõitma. Külgvaatekaameraga (nimetatakse ka nurgavaateks) on see palju lihtsam; eesmise kaitseraua vasakul ja paremal asuvad kaamerad saadavad pildi armatuurlaual olevale ekraanile. Pildil on pilt nurgakaameratest. Kahjuks ei saa kaameraid nähtamatult paigaldada. Külgvaatekaameraga autodel on kaitserauas (sageli) must objektiiv. Alloleval pildil on vasakpoolse kaameraga BMW esikaitseraud.


Ümbritsev vaade:
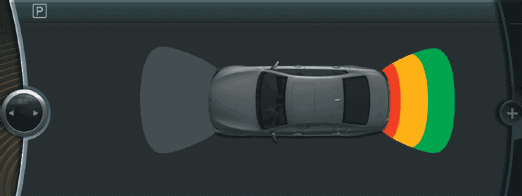
Kõige luksuslikumate parkimisabisüsteemide hulka kuulub kahtlemata „ruumivaade”, tuntud ka kui pealtvaade, 3D või linnuvaade. Iga kaubamärk annab süsteemile oma nime ja tunnuse. Nüüd kasutame nime ruumivaade.
Ruumivaatega kuvatakse ekraanil auto ülaosa. Tundub, et seal on kaamera, mis vaatab auto katust ja selle ümbrust. Auto on simulatsioon ja keskkonda salvestab mitu (tavaliselt neli) kokku pandud kaamerat.
Järgmised kolm pilti (BMW-st) näitavad pilti, mida juht näeb. Parkimisel on selgelt näha parkimiskoha eraldatus ja objektid nagu postid jms. Tagurdades saab taha suumida; Siin näeb peamiselt taimi. Tavalised PDC-andurid registreerivad kauguse taimedeni. Arvuti märgib selle vahemaa punase värviga.

Ettepoole parkimisel saab süsteem näidata ka ümbrust ja esiosa. PDC andurid aitavad nüüd määrata ka kaugust aiast.

Rööpparkimine äärekivi ääres võib, kui juht ei ole ettevaatlik, kahjustada rehve ja velgi. Ka ruumivaade pakub nüüd lahendust; Tänu heale ülevaatele tänavapildist saab parkida otse ja äärekivi lähedale. BMW uusimad arendused võimaldavad kaamerapilti ümber pöörata ja sõidukit simuleerida.

Järgmisel kolmel pildil on näha kohad, kus kaamerad sageli asuvad.



Parkimisabi:
Parkimisabi laiendusena saab piiratud nähtavusega parkimiskohalt tagurpidi juhti aidata nn parkimisabi. See võib juhtuda olukordades, kus sõiduk on pargitud seina äärde või sõidukite vahele.
Auto tagaosas olevad andurid tuvastavad sõiduki tagant mööduva liikluse, mis võib põhjustada kokkupõrkeohtu. See hõlmab kõiki liikuvaid objekte, mis lähenevad sõidukile teatud kiirusega. Kui parkimisabisüsteem tuvastab läheneva sõiduki, ilmub teabe- ja meelelahutussüsteemi ekraanile teade. Tavaliselt lisatakse sellele akustiline helisignaal. Kui juht eirab neid signaale ja sõidab tagurpidi, sekkub süsteem füüsiliselt, vajutades pidureid, et sõidukit aeglustada.
