Muude vähenduste arvutamine (vastavalt geomeetrilistele seeriatele)
Vähenduste arvutamine korrigeeritud geomeetrilise jada järgi (Jante seeria)
Sõiduki kiiruse arvutamine vähendamise kohta (geomeetrilised seeriad)
Sõiduki kiiruse arvutamine vähendamise kohta (parandatud geomeetriline seeria)
Käiguarvude tutvustus: Ülekandearvu määrab:
hammasrataste (nt käigukasti) hammaste arv
Rihmarataste läbimõõt (näiteks mitme rihmaga käitatavad komponendid)
Jooniselt on näha, et käigul A on 20 hammast ja käigul B 40 hammast. Suhe on 40/20 = 2:1. See tähendab, et käik A (vedav) teeb kaks pööret, kui käik B teeb ühe pöörde. Praktikas pole see tegelikult kunagi nii. Alati on tagatud suhe, mis ei ole kunagi täpselt 2,00:1, sest viimasel juhul löövad iga pöördega samad hambad. Kui käigul B oleks 39 hammast (1,95:1) või 41 hammast (2,05:1), läheksid A ja B hammasrattad iga pöördega ühe hamba võrra kaugemale, mille tulemuseks on 20 korda väiksem kulumine kui suhe 2:1.
Kõrge ülekandearv (kus käigukast on väike ja vedav käik suur) annab suure tippkiiruse ja madal ülekandearv annab suurema tõmbejõu. Auto (põhimõtteliselt kõik mootorsõidukid) käigukasti puhul arvestatakse konstruktsioonis auto kasutamise otstarvetega. Auto, mis on mõeldud peamiselt raske koorma vedamiseks, vajab madalatel käikudel rohkem tõmbejõudu kui sportauto, mis peab suutma saavutada suurt tippkiirust. Kõrgeima käigu ülekandearv peab olema konstrueeritud nii, et mootori maksimaalne pöörete arv oleks saavutatav maksimaalse mootori võimsuse juures. Kahju oleks, kui kiirus oleks juba piiri lähedal ja jõudu oleks veel piisavalt, et veelgi kiirendada. Lisaks kõrgeimale käigule tuleb hoolikalt valida ka madalaim käik; auto peab suutma kõige halvemates oludes 40% kallakul esimese käiguga ära sõita ilma probleemideta. Lisaks tuleb nende vahel määrata vahekäikude, st 2, 3 ja 4 (võimalik, et ka 5, kui tegemist on 6-käigulise käigukastiga) vahekäigud.
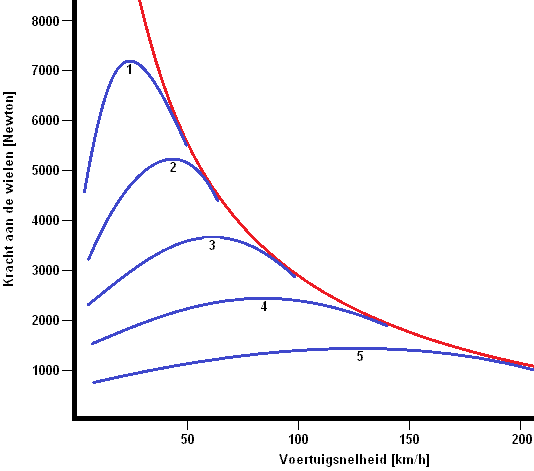
Jõud ratastele Graafikul (pildil) on mootori karakteristikud tähistatud siniste joontega ja sõiduki karakteristikud punase joonega. Siin on selgelt näha, et 1. käik annab ratastele suure jõu (ligikaudu 7200N, seega 7,2kN) ja kõrgeim käik (5.) annab ratastele maksimaalselt 1500N jõu. Sõiduki kiiruse ja kiirenduse suurenedes ratastele mõjuv jõud väheneb. Siniste joonte edenemine on ülekandearvude tulemus ja kaldus punane joon on sõidutakistuse (veeremis- ja õhutakistus) tulemus.
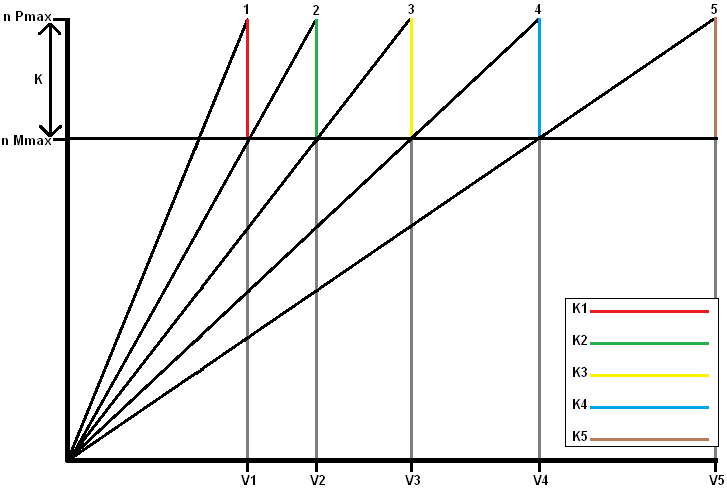
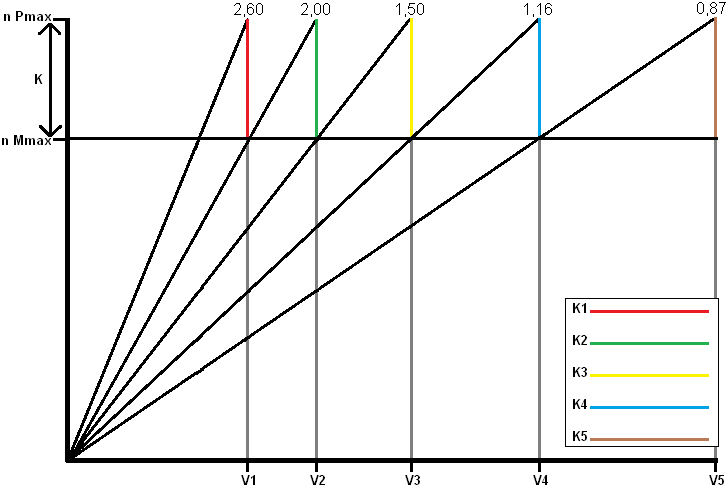
Määrake K-tegur vastavalt geomeetrilisele seeriale: Järgmine tekst on seotud alloleva saehamba diagrammiga.
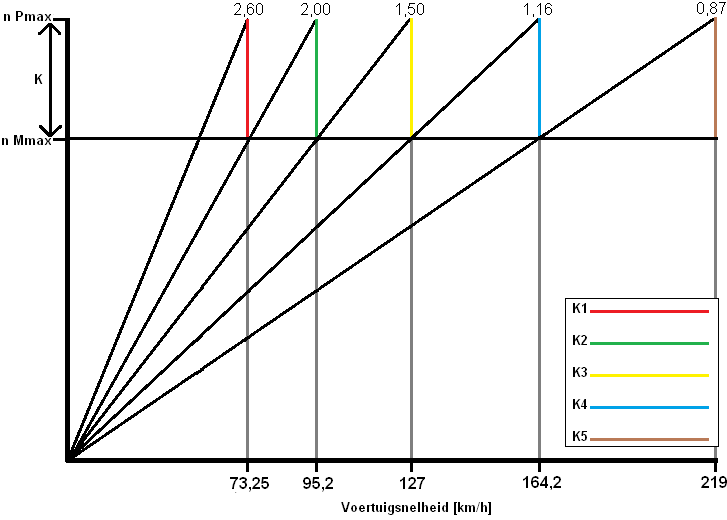
Kui kiirendate esimesel käigul mootori maksimaalsele pöörlemiskiirusele, peate lülitama 2. käigule. Pärast käiguvahetust ja väljalülitamist on mootori pöörlemiskiirus langenud ja sõiduki kiirus jääb samaks. Käigu vahetamisel 1. käigult 2. käigule järgib mootori pöörlemissagedus alloleval graafikul olevat punast joont. Mootori pöörlemiskiirus langeb väärtuselt n Pmax väärtusele n Mmax. Värvilised jooned kirjeldavad K-tegurit. K-teguri suurus määrab värviliste joonte suuruse. Kui “n Mmax” ja “n Pmax” on üksteise lähedal, on K-tegur väike. Seega on ülekannete vahel väiksemad vahed. See toimib samamoodi ka teiste käikudega. Kui kiirendate 2. käigult n Pmax-ni (kuni V2), järgitakse käiguvahetusel rohelist joont kuni n Mmax.
n Pmax: mootori pöörlemiskiirus, mille juures saavutatakse maksimaalne võimsus (nt 6000 p/min), kui "n Pmax" on "kiirus maksimaalsel võimsusel".
n Mmax: mootori pöörlemissagedus, mille juures saavutatakse maksimaalne pöördemoment (nt 4000 p/min), kui "n Mmax" on "kiirus maksimaalse pöördemomendi juures"
Pöörete ja käikude suhted jäävad samaks. Seetõttu jäävad kõik värvilised jooned (K1 kuni K5) samaks. K-tegur määratakse mootori karakteristiku järgi. K-tegur jääb mootori maksimaalse pöördemomendi ja mootori maksimaalse võimsuse pöörete arvu vahele. Seetõttu arvutatakse käigukasti ülekandearvud selle mootori karakteristiku põhjal. Koefitsiendi K saab geomeetrilise jada jaoks määrata järgmiselt: K = n Pmax / n Mmax K = 6000 / 4000 K=1,5
K-tegur 1,5 määrab kõigi käikude vähendused (ülekanded). Need kõik on omavahel kooskõlastatud. Sõiduautodele geomeetrilist seeriat ei rakendata, kuna kõrgematel käikudel on suured vahed. Sõiduautode käigukastid on projekteeritud korrigeeritud geomeetrilise seeria järgi (Jante seeria).
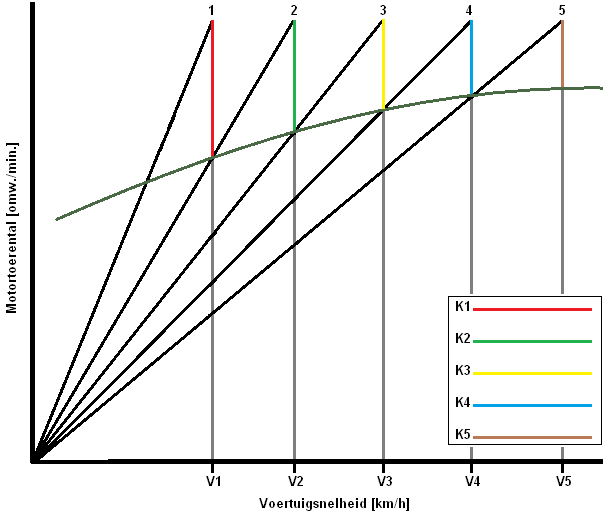
Määrake K-tegur vastavalt korrigeeritud geomeetrilisele jadale (Jante seeria): Sõiduautodes on madalate käikude vahed sageli suured ja muutuvad kõrgemate käikude korral väiksemaks. Väikesed vahed kõrgete käikude vahel põhjustavad vähesel määral kiirenduskaotust. Kõrgemate käikude ülekandearvud muutuvad järjest väiksemaks, võimaldades mootori võimsust maksimaalselt ära kasutada. Samuti võite seda märgata; Mootori pöörlemissagedus langeb rohkem 1. käigult 2. käigule kui 3. käigult 4. käigule lülitamise vahel. See on näha alloleval saehamba diagrammil; punane joon on suurem kui kollane joon:
Aritmeetilist seeriat nimetatakse ka "Jante seeriaks". See on korrigeeritud geomeetriline seeria. K-tegur on kõikidel käikudel erinev. Sellel on suured eelised võrreldes ülalmainitud fikseeritud K väärtusega geomeetriliste seeriatega. Kuna kõrgemate käikude ülekandearvud muutuvad väiksemaks, kasutatakse mootori maksimaalset võimsust. Ratastele mõjuv jõud on nüüd suurem kui geomeetrilises seerias. K-tegur on nüüd iga käigu puhul erinev (kõik värvilised jooned on erineva pikkusega), seega tuleb see kõik nüüd arvutustega määrata. Käikude ülekandearvud saab määrata K-teguri abil. K-tegurit teadmata saab määrata madalaima või kõrgeima käigu vähendamise, kuid ülejäänud kiirendused tuleb siis arvutada K-teguriga. Alles seejärel saab joonistada saehamba diagrammi.
Ülekandearvude määramine (sissejuhatus): Käigukasti tootja peab arvestama mitme asjaga. Käigukasti ülekanded tuleb kokku panna ettevaatlikult. Olulised on näiteks sellised tegurid nagu kiirused, mille juures on mootoril suurim pöördemoment ja võimsus, dünaamiline rehviraadius, diferentsiaali vähenemine ja kogu jõuülekande efektiivsus. See on loetletud allpool:
Kiirused, kus mootoril on suurim pöördemoment ja võimsus: Need on ülaltoodud geomeetrilise seeria joonisel näidatud kiirused “n Pmax” ja “n Mmax”.
Dünaamiline rehvi raadius: See on kaugus rummu keskpunkti ja teepinna vahel. Mida väiksem on ratas, seda suurem on ratta kiirus sama sõiduki kiiruse juures. Dünaamilise rehvi raadiuse saab arvutada järgmiselt (kui see on juba teada): Selle arvutamiseks peab olema teada rehvimõõt. Näitena võtame rehvimõõdu 205/55R16. See tähendab, et rehv on (205 x 0,55) = 112,75 mm = 11,28 cm kõrge. Kuna see on 16 tolli, tuleb see teisendada sentimeetriteks: 16 x 2,54 (tolli) = 40,64 cm. See puudutab teekatte ja rummu vahelist kaugust, seega tuleb kogukõrgus 40,64 cm jagada kahega: 2 / 40,64 = 2 cm. Rehvi dünaamiline raadius (Rdyn) on nüüd: 11,28 + 20,32 = 31,60 cm.
Diferentsiaali vähendamine: Diferentsiaalil on alati fikseeritud ülekandearv. Käigukast peab olema sellele kohandatud. Tarbesõidukitel võib olla kuni 5 diferentsiaali.
Kogu jõuülekande efektiivsus: Hõõrdekadude tõttu on muuhulgas alati teatud protsentuaalne kadu. See oleneb ka õli paksusest (ja temperatuurist). Tavaliselt on tootlus umbes 85–90%.
Nüüd hakkame kindlaks tegema fiktiivse mootori ja käigukasti ülekandearvud (vähendused).
Järgmised spetsifikatsioonid on teada:
Sõiduki mass: 1500 kg
Kukkumise kiirendus (G): 9,81m/s2
Käigukasti tüüp: manuaal 5 käiguga ja tagurpidi
Dünaamiline rehvi raadius: 0,32 m (= 31,60 cm eelmisest arvutusest)
Diferentsiaali vähendamine: 3,8:1
Ajami efektiivsus: 90%
Sõiduki maksimaalne kiirus: 220 km/h (220 / 3,6 = 61,1 m/s)
Maksimaalne kalle: 20%
Veeretakistuse koefitsient (μ): 0,020
n Pmax: 100 kW 6500 p/min juures
n Mmax: 180 Nm 4500 p/min juures
Kõigepealt tuleb kindlaks teha, kui suurt pöördemomenti suudavad rattad teepinnale edasi anda. See sõltub sõiduki seisukorrast, sest kas see sõidab madala veeretakistusteguriga asfaltteel? Seda saab arvutada koos veeretakistuse ja dünaamilise rehvi raadiusega. Veeretakistuse valem on järgmine: Frol = μ xmxgx cos α (selgituse saamiseks vaadake lehte sõidutakistused) Frol = 0,020 x 1500 x 9,81 x cos 18 = 279,9 N
Kuna kalle on olemas, tuleb arvutada ka kalle F: F kalle = mxgx sin α F kalle = 1500 x 9,81 x sin 18 = 4547,2 N
Õhutakistust võib tähelepanuta jätta, seega on kogu sõidutakistus järgmine: Frij = Frol + Fslope Frij = 279,9 + 4547,2 = 4827,1 N
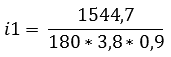
Maksimaalse pöördemomendi arvutamiseks, mida rattad võivad teepinnale edastada, tuleb Frij korrutada dünaamilise rehvi raadiusega Mwiel = Frij x Rdyn M ratas = 4827,1 x 0,32 Mratas = 1544,7 Nm
K-tegur: Nüüd arvutame K-teguri: K = n Pmax / n Mmax K = 6000 / 4500 K=1,33
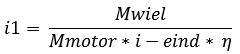
Arvutage 1. käigu vähendamine: Esimese käigu arvutamise valem on järgmine:
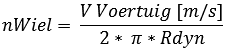
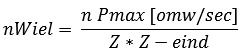
Arvutage 5. käigu vähendamine (vastavalt geomeetrilisele seeriale): Sarnaselt saab määrata ka 5. käigu vähendamist. 5. käik tuleb määrata mootori maksimaalse pöörete järgi, sest oleks tüütu, kui mootoril oleks veel piisavalt jõudu, et edasi kiirendada seni, kuni maksimaalne mootoripööre (ja seega ka auto tippkiirus) on saavutatud. Samuti on oluline ratta kiirus (nWheel) sõiduki maksimaalsel kiirusel. See tuleb kõigepealt välja arvutada:
Nüüd, kus ratta kiirus on teada sõiduki maksimaalsel kiirusel 220 km/h (61,1 meetrit sekundis), saab välja arvutada 5. käigu vähenemise.
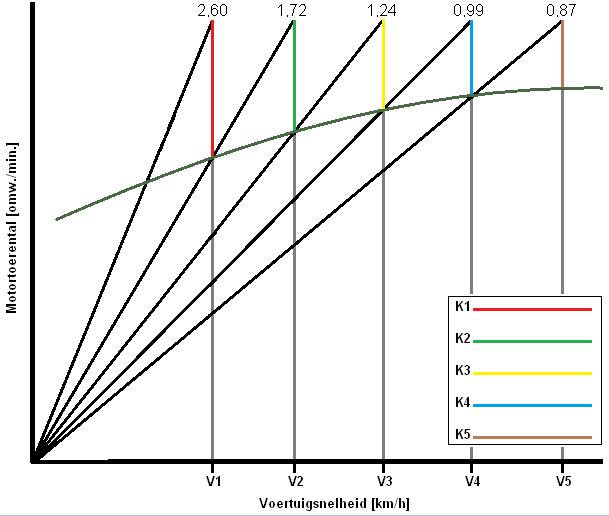
Muude vähenduste arvutamine (vastavalt geomeetrilistele seeriatele): Arvutuste kohaselt on 5. käigu vähenemine 0,87 ja K-tegur = 1,33. Nende andmetega (vastavalt geomeetrilisele seeriale) saab välja arvutada 2., 3. ja 4. käigu vähenemise.
i5 = (on juba varem arvutatud) i4 = K x i5 i3 = K x i4 i2 = K x i3 i1 = K x i2
Vähendus i1 on siin juba teada, nii et kui jääk on õigesti arvutatud, peaks tulemuseks olema sama arv (nimelt 2,51). Väike kõrvalekalle on normaalne, sest vahepeal on tehtud palju ümardamist. Nüüd saab kõigi vähenduste rida täita. Arvutused tuleb teha ülalt alla. Vastust i5 kasutatakse i4 ja i4 vastust i3 jne jaoks.
i5 = 0,87 i4 = 1,33 x 0,87 = 1,16 i3 = 1,33 x 1,16 = 1,50 i2 = 1,33 x 1,50 = 2,00 i1 = 1,33 x 2,00 = 2,60
Geomeetrilise seeria tabeli saab nüüd valmis teha.
Vähenduste arvutamine korrigeeritud geomeetrilise jada järgi (Jante seeria): Varem on lehel selgitatud erinevust geomeetrilise jada ja “parandatud” geomeetrilise seeria vahel. Korrigeeritud geomeetrilise seeria, mida nimetatakse ka “Jante seeriaks”, eeliseks on see, et suuremate vähenduste K-tegur on üksteisele lähemal. Geomeetrilise jada K-tegur oli konstantne (see oli n P max jagatud n Mmax-iga ja oli 1,33). See andis ka graafikus püsiva väärtuse. Parandatud geomeetrilise seeriaga on graafikul joon, mis näitab, et K väärtus ei ole konstantne. K-tegur väheneb iga kiirendusega. Parandatud geomeetrilisel real on konstantne väärtus. Me tähistame seda tähega m. M väärtus = 1,1.
Parandatud geomeetrilise seeria K väärtuse üldvalem on järgmine:
Valemi seletus: z-1 = käikude arv miinus üks i1 = esimene käik m kuuenda astmeni = konstant 6. astmeni iz = käikude koguarv
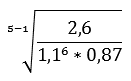
Täidetuna annab see neljanda juure 2,6 / (1,1^6 x 0,87) (Sisestage kalkulaatorisse ruutjuur järgmiselt: esmalt sisestage 4, seejärel SHIFT, millele järgneb radikaali märk, mille kohal on x. Seejärel kirjutage korrutis sulgude vahele eraldusjoone alla).
Vastus on: 1,14
Parandatud geomeetrilise jada K väärtus on seega 1,14. Arvutame selle edasi:
i5 = (varem arvutatud) i4 = K x i5 i3 = K2 xmx i5 i2 = K3 x m3 x i5 i1 = K4 x m6 x i5
i5 on teada; see on nimelt 0,87. K väärtus on 1,14 ja m on 1,1. Nende andmetega saame täita tabeli:
i5 = 0,87 i4 = 1,14 x 0,87 i3 = 1,142 x 1,1 x i5 i2 = 1,143 x 1,13 x i5 i1 = 1,144 x 1,16 x i5
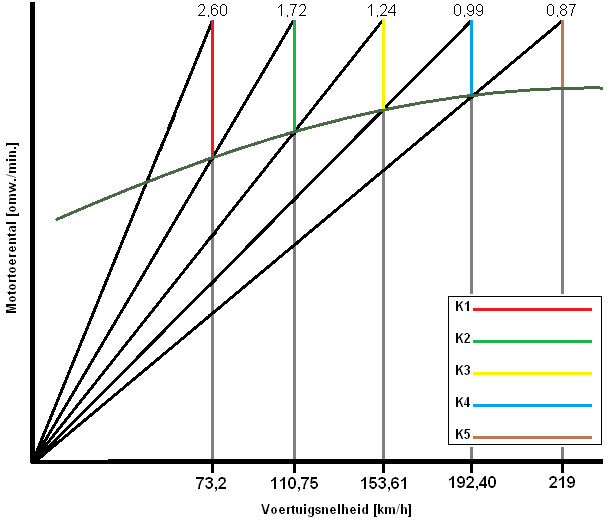
i5 = 0,87 i4 = 0,99 i3 = 1,24 i2 = 1,72 i1 = 2,60
Parandatud geomeetriliste seeriate tabelit saab nüüd täita:
Arvutage sõiduki kiirus ühe vähendamise kohta (geomeetrilised seeriad): Sõiduki kiirust saab määrata iga vähendamise jaoks. See on maksimaalne kiirus, mida sõiduk suudab selle käiguga saavutada maksimaalse kiirusega 6000 pööret minutis. Arvestus on järgmine:
Sõiduki 1. vähendamine = 2 x π x nRatas x Rdyn (nRatas arvutati just esimese käigu jaoks ja Rdyn oli juba teada; see on 0,32 m. Seejärel saab sisestada valemi:
Sõiduki 1. vähendamine = 2 x π x 10,12 x 0,32 V sõiduki 1. vähendamine = 20,35 m/sx 3,6 = 73,25 km / h
Ülejäänud kiirendusi saab lihtsalt arvutada, muutes esimeses valemis Z = 2,60 soovitud kiirenduse vähendamiseks ja sisestades selle teise valemisse kui nWheel. Teistel käikudel on järgmised tulemused:
2. käik: 95,2 km / h 3. käik: 127 km / h 4. käik: 164,2 km / h 5. käik: 219 km / h (see on auto tippkiirus)
Need kiirused saab sisestada geomeetriliste ridade tabelisse.
Arvutage sõiduki kiirus ühe vähendamise kohta (parandatud geomeetriline seeria): Arvestus on täpselt sama ja seetõttu seda enam ei märgita.
1. käik: 73,2 km/h 2. käik: 110,75 km/h 3. käik: 153,61 km/h 4. käik: 192,40 km/h 5. käik: 219 km/h
Nagu nüüd selgelt näha, on auto tippkiirused geomeetrilise ja korrigeeritud geomeetrilise seeria puhul samad. Geomeetrilises seerias (esimene) on kõrgemate käikude vahed väga suured ja korrigeeritud geomeetrilises seerias on vahed kõigi käikude vahel peaaegu ühesugused. Viimast kasutatakse tänapäeva sõidukites.