Teemad:
- Sissejuhatus
- Diagnoos CAN siini signaalid madala / keskmise kiirusega
- Diagnoos CAN siini signaalid suure kiirusega
- Diagnoos multimeetriga
Eessõna:
Kui on kahtlus, et CAN-siinis on rike, saab diagnoosi panna muuhulgas juhtmete pingetasemete mõõtmise teel.
CAN siini sõnumi sisu pole esialgu oluline. CAN siini juhtmetel saame mõõtmisi teha nii multimeetri kui ka ostsilloskoobiga. Multimeetriga mõõtmistel on piirang; pingete mõõtmisel näidatakse ainult keskmist väärtust. Katkestuse või lühise mõõtmisel piisab multimeetrist piiratud ulatuses. Ostsilloskoopi on vaja pingetasemete mõõtmiseks ja selle hindamiseks, kas signaalil on puhas tee.
Sellel lehel on selgitatud, kuidas CAN-siin süsteem töötab ja kuidas sõnumid on üles ehitatud CAN-buss. See leht keskendub CAN-siini mõõtmisele ostsilloskoop ja multimeeter kirjeldatakse võimalikke rikkeid ja põhjuseid.
Diagnoos CAN siini signaalid madala / keskmise kiirusega:
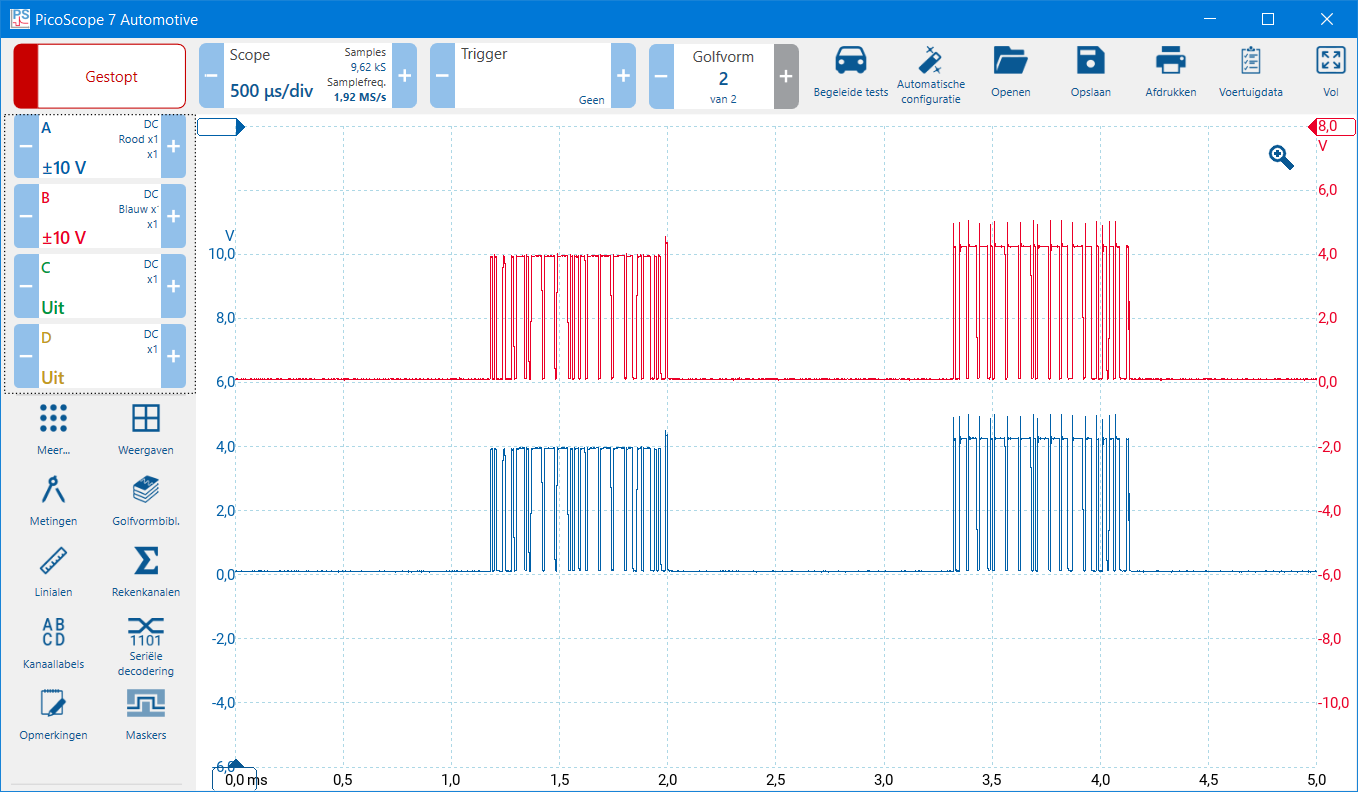
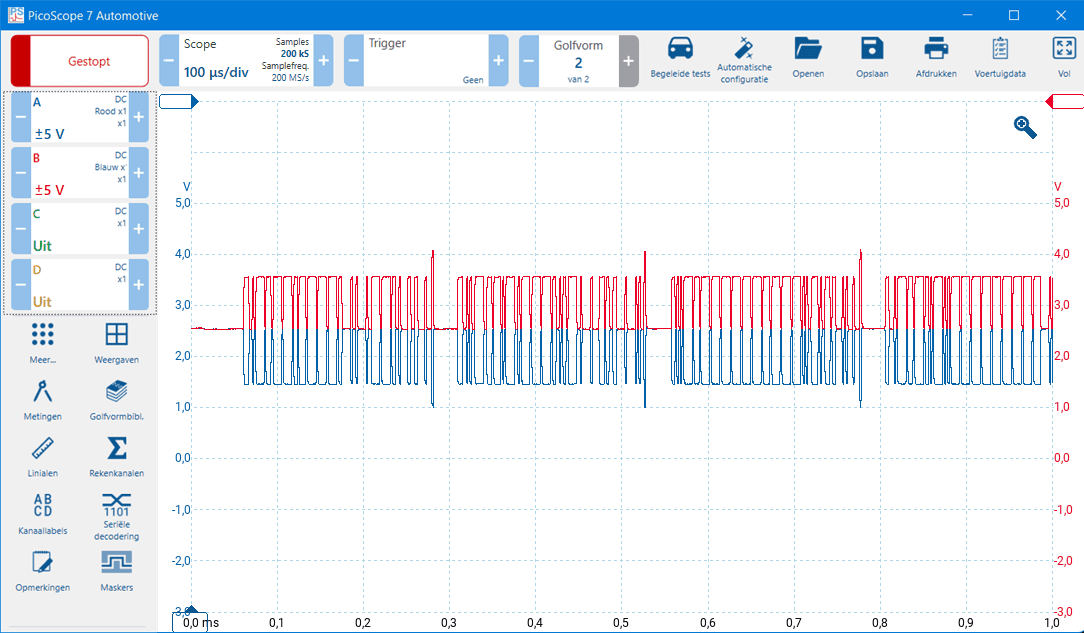
Kahe kanaliga ostsilloskoobiga saab CAN-kõrget ja CAN-madalat mõõta samaaegselt maapinna suhtes. Kaks allolevat skoobi pilti näitavad mugavussiini CAN-siini signaali. Seda nimetatakse ka "madalaks kiiruseks" või "keskmiseks kiiruseks". Sageli leiame selle võrgu mugavuselektroonikast, näiteks ukseelektroonikast, BCM-ist, kliimaseadme juhtseadmest ja armatuurlauast. Pinged on järgmised:
- CAN-madal: puhkeolekus 0 volti, aktiivne 4 volti;
- CAN-kõrge: tühikäik 5 volti, aktiivne 1 volti.
Kui seame mõlema mõõtekanali nulljooned samale Y-telje kõrgusele, siis signaalid ühinevad. Seetõttu on lugemiseks soovitatav liigutada CAN-low Y-telge ülespoole. Teisel alloleval pildil on nulljooned muutnud kõrgust, nii et CAN-i kõrge ja madala pingeprofiili saab korralikult võrrelda.
Pange tähele: erinevalt kiirest CAN-võrgust ei ole madala ja keskmise kiirusega CAN-võrgud sageli varustatud lõpptakistitega. Seetõttu on tõrke korral tehtud mõõtmised samuti erinevad. See jaotis näitab väikese ja keskmise kiirusega võrgu võimalikke häireid ning järgmine jaotis näitab kiiret võrku.


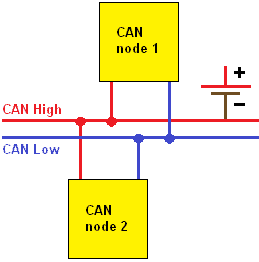
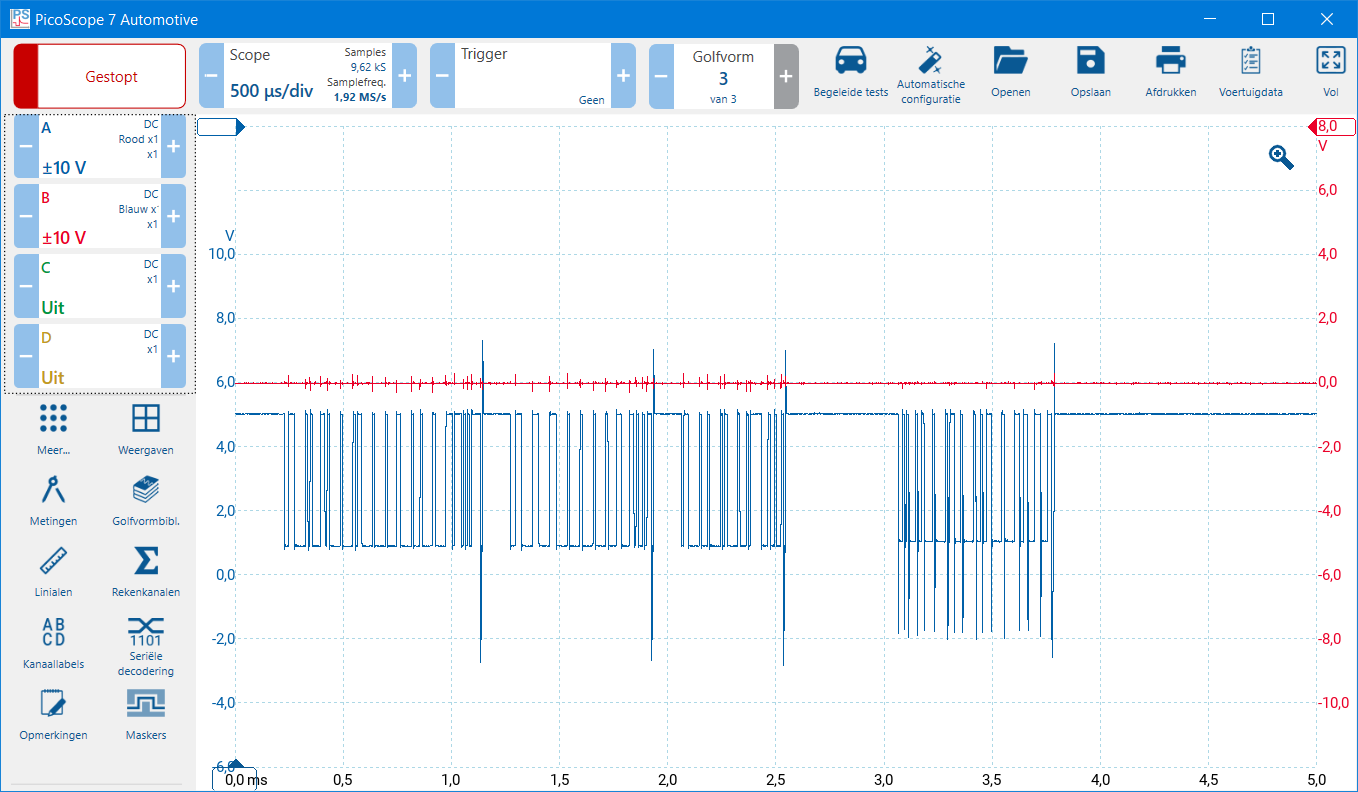
CAN-kõrge maandusega lühistatud:
CAN kõrgel on maanduslühis. Kui isolatsioon on kahjustatud, võib juhtmestik kerega kokku puutuda või ECU-s tekib lühis maandusega.
Alloleval mõõtmisel näeme kanali B konstantse pinge liini, mis on 0 volti.
CAN-madal lühis maandusega:
CAN-low-s on maanduslühis. Kui isolatsioon on kahjustatud, võib juhtmestik kerega kokku puutuda või ECU-s tekib lühis maandusega.
Alloleval mõõtmisel näeme kanalil A konstantse pinge liini, mis on 0 volti.
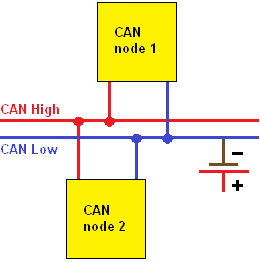
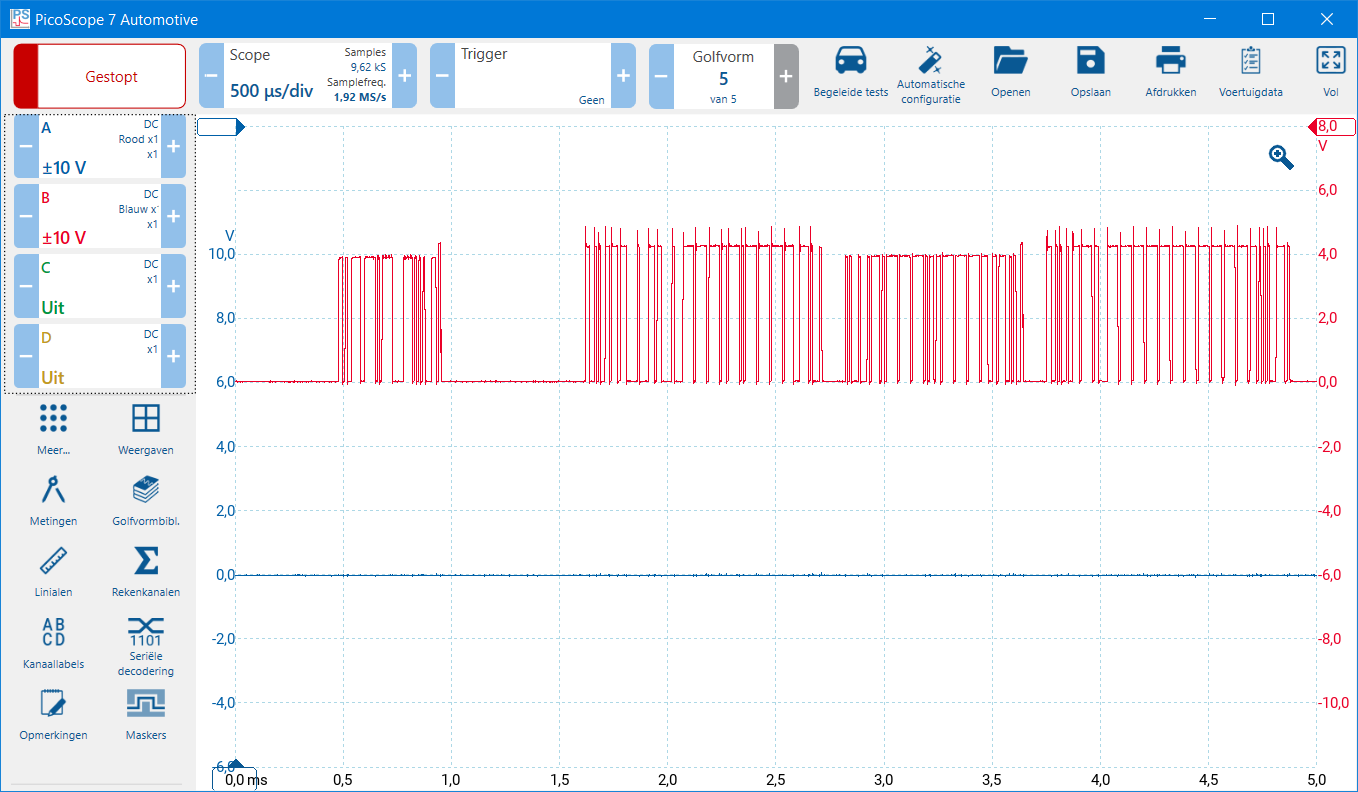
CAN-kõrge lühis plussiga:
CAN-i kõrgel tasemel on positiivne sulgemine. Kui juhtmestiku mitme juhtme isolatsioon on kahjustatud, võivad juhtmed üksteisega kokku puutuda või ECU-s tekib lühis positiivsega.
Kahel alloleval mõõtmisel näeme:
- Kanali üleulatus: kanali B (punane) pingevahemikku tuleb suurendada;
- Kanalil B näeme (20 V vahemikus) konstantse pinge joont, mis on võrdne aku pingega.


CAN-madal lühis plussiga:
CAN-low on positiivse vooluringiga. Kui juhtmestiku mitme juhtme isolatsioon on kahjustatud, võivad juhtmed üksteisega kokku puutuda või ECU-s tekib lühis positiivsega.
Kahel alloleval mõõtmisel näeme:
- Kanali ületamine: kanali A (sinine) pingevahemikku tuleb suurendada;
- Kanalil A näeme (20 V vahemikus) konstantse pinge joont, mis on võrdne aku pingega.


CAN-kõrge lühis koos CAN-madalaga:
CAN-low muutub üksteisega ühendamisel CAN-high pingeprofiiliks. Lühis CAN-high ja CAN-low vahel võib tekkida juhtmestikus, kus mõlema CAN-siini juhtme isolatsioon on läbi kulunud või ECU trükkplaadi defekti tõttu.
Alloleval pildil näeme kahe kanaliga mõõtmist, kus CAN kõrge ja madal on omavahel lühises.
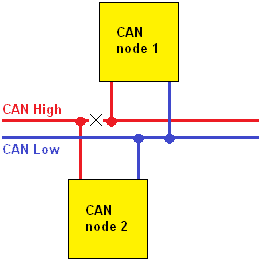
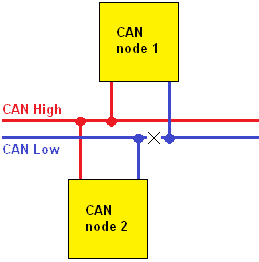
Kõrge CAN-tasemega side aeg-ajalt katkeb:
Side ühe juhtseadmega CAN kõrgel on katkenud. See juhtseade ei saada ega võta enam vastu andmeid CAN-high kaudu, kuid CAN-low töötab endiselt. See tähendab, et suhtlemine ja lugemine jäävad võimalikuks.
Kui vastava juhtploki pistik lahti ühendada, kaovad ka CAN-low andmed ning CAN-high ja CAN-low erinevust pole enam näha.
Alloleval pildil näeme, et CAN-high jääb teatud punktis süvistatuks, samal ajal kui andmeid saadetakse CAN-madal.
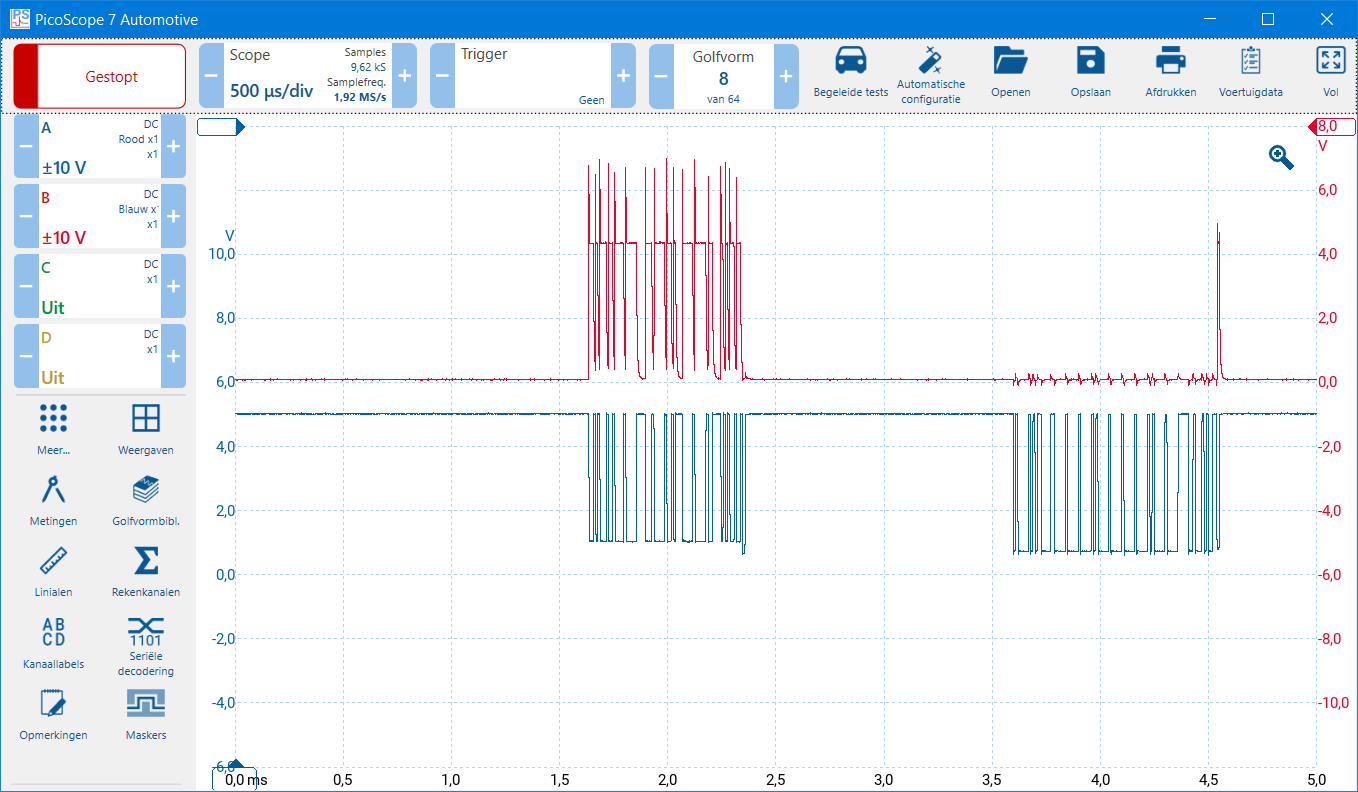
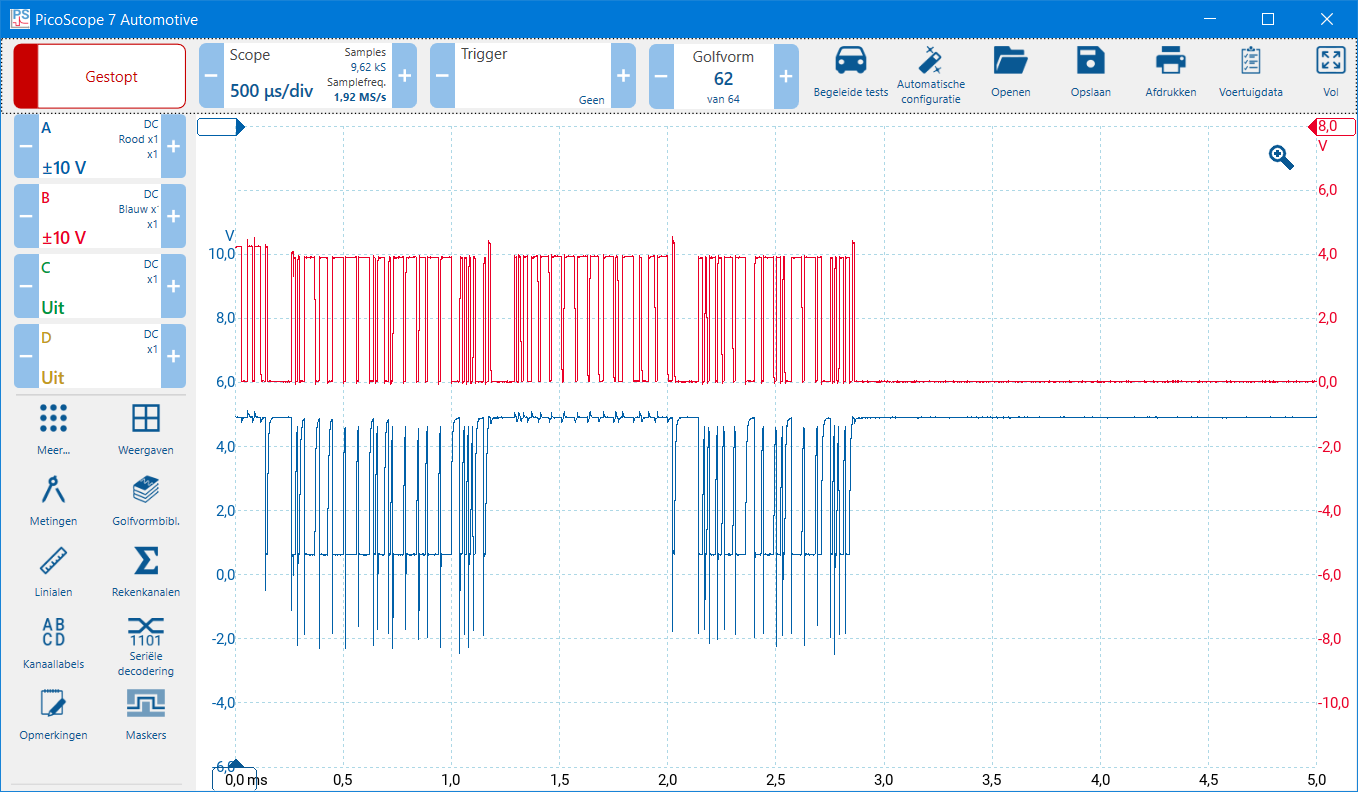
Madala CAN-taseme korral side aeg-ajalt katkeb:
Side ühe juhtseadmega CAN-low-s on katkenud. See juhtseade ei saada ega võta enam vastu andmeid CAN-low kaudu, kuid CAN-high toimib endiselt. See tähendab, et suhtlemine ja lugemine jäävad võimalikuks.
Kui vastava juhtploki pistik lahti ühendada, kaovad ka CAN-kõrge andmed ning CAN-high ja CAN-low erinevust pole enam näha.
Alloleval pildil näeme, et CAN-madal jääb teatud punktis retsessiivseks, samal ajal kui andmed saadetakse CAN-kõrgele.
Diagnoos CAN siini signaalid suure kiirusega:
ECU-d, mille jaoks on suur sidekiirus väga oluline, on varustatud kiire CAN-võrguga. Siia kuuluvad näiteks sisepõlemismootori ECU, automaatkäigukast, ABS/ESP/EBS ja turvapadjad. Kiire võrk on alati varustatud lõpptakistitega. Vead juhtmestikus ja ECU-des põhjustavad seetõttu ka teistsuguse pingeprofiili, mis võib mõnikord muuta diagnoosimise keerulisemaks kui mugavusvõrgu puhul. Nagu alati, kuvatakse kõigepealt probleemideta olukord, enne kui jätkame tõrgetega.
Kiire võrgu pinged on järgmised:
- CAN-kõrge: tühikäik 2,5 volti, aktiivne 3,5;
- CAN-madal: tühikäik 2,5 volti, aktiivne 1,5 volti.
Kui CAN kõrge ja madal on mõlemad 2,5 volti, on siin retsessiivne (puhkeolekus). Kui CAN high tõuseb ja CAN madal langeb, muutub siin domineerivaks ja tekib natuke. Alloleval pildil on kuvatõmmis õigest kiirest CAN-siini signaalist.
Kui selline signaal on mõõdetud ja näha on palju müra, on soovitatav eemaldada sõidukist akulaadija ja ühendada ostsilloskoop sõiduki maapinnaga (Automotive skoobide tagaküljel on maandusühendus) ja signaali saab sämplisagedusega puhtamaks muuta. Diskreetsagedus silub signaali, nii et kui see kaldub standardväärtusest liiga kaugele, võib CAN-signaal liiga palju moonutada.
Selguse huvides on alloleval pildil CAN-high punane ja CAN-low sinine.
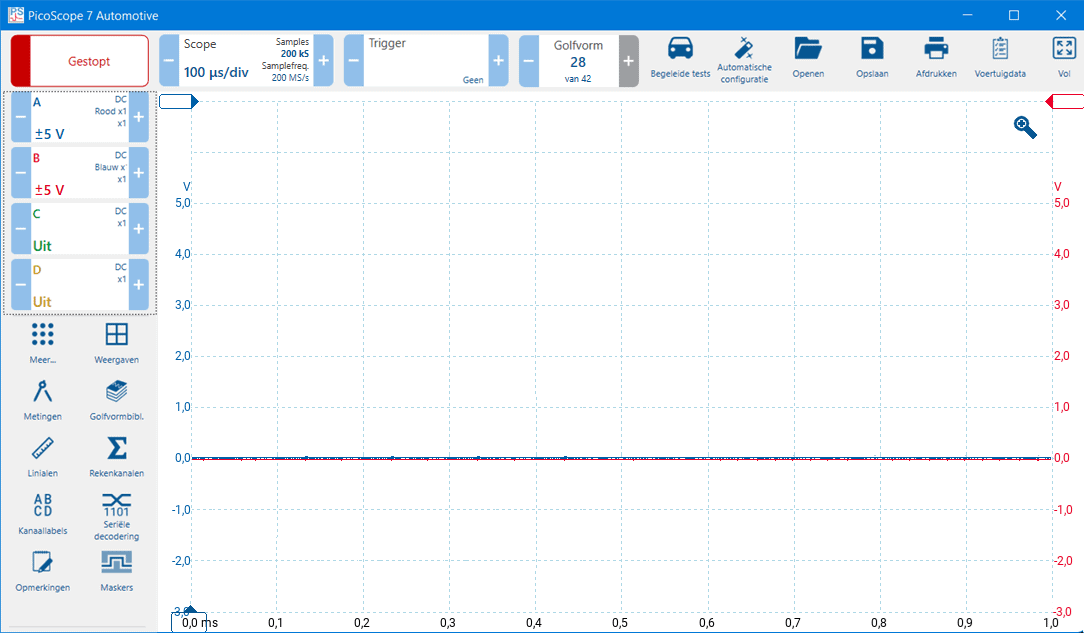
CAN-kõrge maandusega lühistatud:
CAN kõrgel on maanduslühis. Kui isolatsioon on kahjustatud, võib juhtmestik kerega kokku puutuda või ECU-s tekib lühis maandusega.
Alloleval mõõtmisel näete, et CAN-high (punane) on täpselt 0 volti, kuna sellel on lühis maandusega. CAN-low (sinine) on veidi üle nulljoone. Selle signaali sisse suumimisel muutub see veelgi selgemaks. Kuna CAN-high on täpselt 0 volti ja CAN-low on mõne kümnendiku võrra kõrgem, võime järeldada, et CAN-high on lühises maandusega.
CAN-madal lühis maandusega:
CAN-low-s on maanduslühis. Kui isolatsioon on kahjustatud, võib juhtmestik kerega kokku puutuda või ECU-s tekib lühis maandusega.
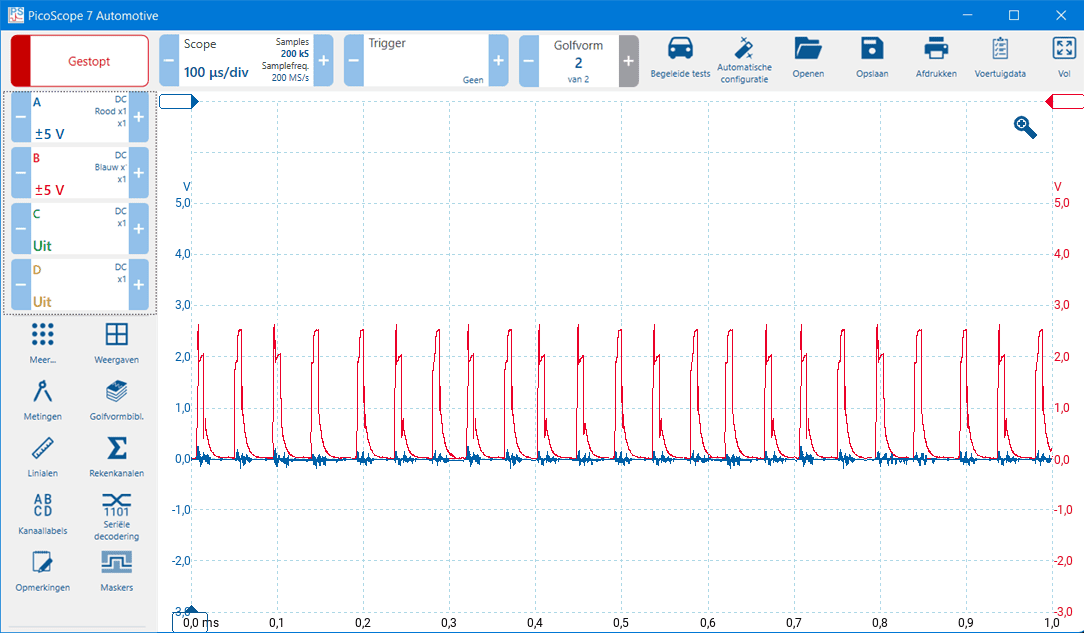
Alloleval mõõtmisel näeme, et CAN-low on 0 volti. Kuigi mõningast müra on näha, võime seda ignoreerida. CAN-low on maandusega lühises. Näeme, et CAN-kõrgepingeliin tõuseb pidevalt, kuid sellest ei piisa side alustamiseks. Samuti näitab skoobi pilt, et CAN-low on alati madalam pinge kui CAN-high (punane on alati veidi kõrgem kui sinine), mis tähendab, et võime eeldada, et CAN-low on maandusega lühises.
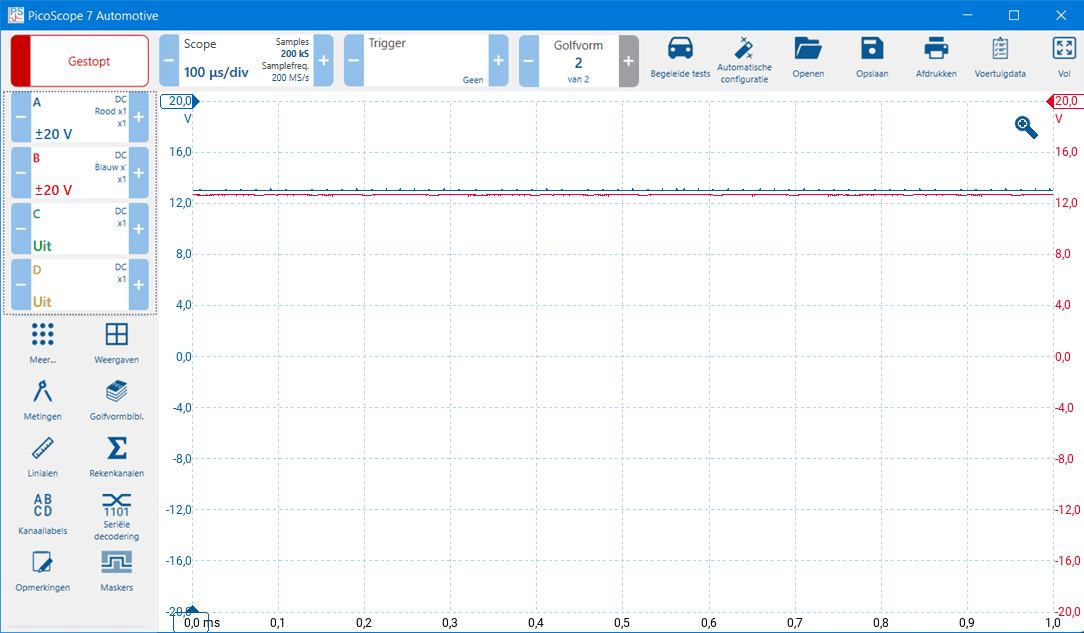
CAN-kõrge lühis plussiga:
CAN-i kõrgel tasemel on positiivne sulgemine. Kui juhtmestiku mitme juhtme isolatsioon on kahjustatud, võivad juhtmed üksteisega kokku puutuda või ECU-s tekib lühis positiivsega.
Alloleval pildil näeme nähtust, mis sarnaneb olukorraga, kus CAN-low lühistati maandusega. CAN-high (punane) on tõusnud pardal olevale pingele umbes 12 volti. CAN-low (sinine) on samuti pinges tõusnud ja proovib endiselt signaali langetades suhelda. Kuna side puudub, korduvad negatiivsed pinge tipud.
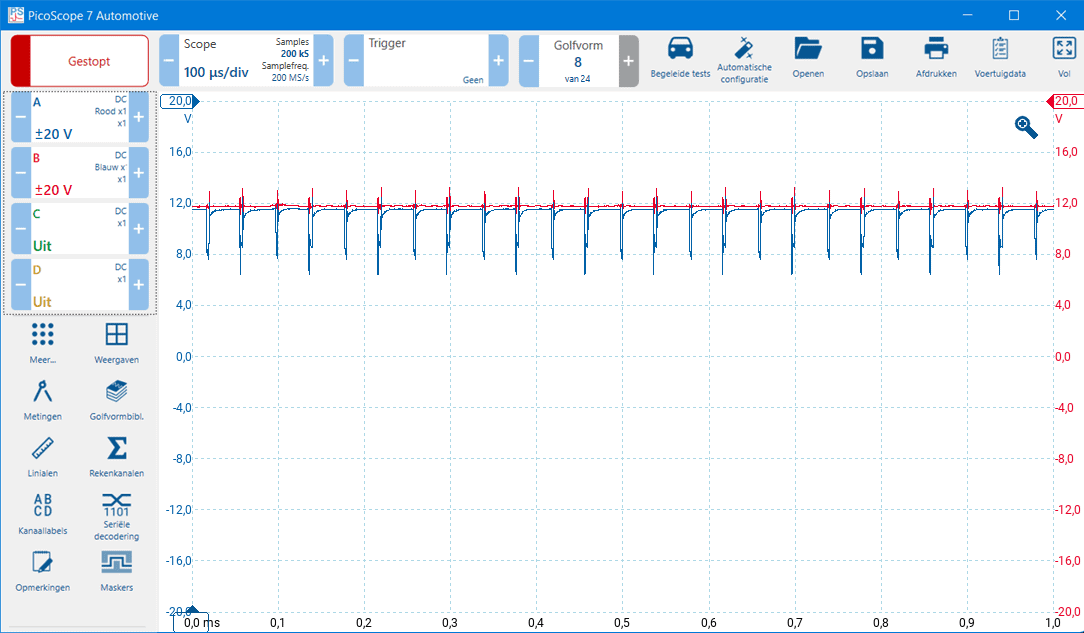
CAN-madal lühis plussiga:
CAN-low on positiivse vooluringiga. Kui juhtmestiku mitme juhtme isolatsioon on kahjustatud, võivad juhtmed üksteisega kokku puutuda või ECU-s tekib lühis positiivsega.
Alloleval mõõtmisel näeme, et CAN-high ja CAN-low on umbes 12 volti. Siiski on CAN-madala pinge umbes 200 mV kõrgem kui CAN-high. CAN-low tõstis koos sellega ka CAN-high. See näitab, et CAN-low on lühises plussiga.
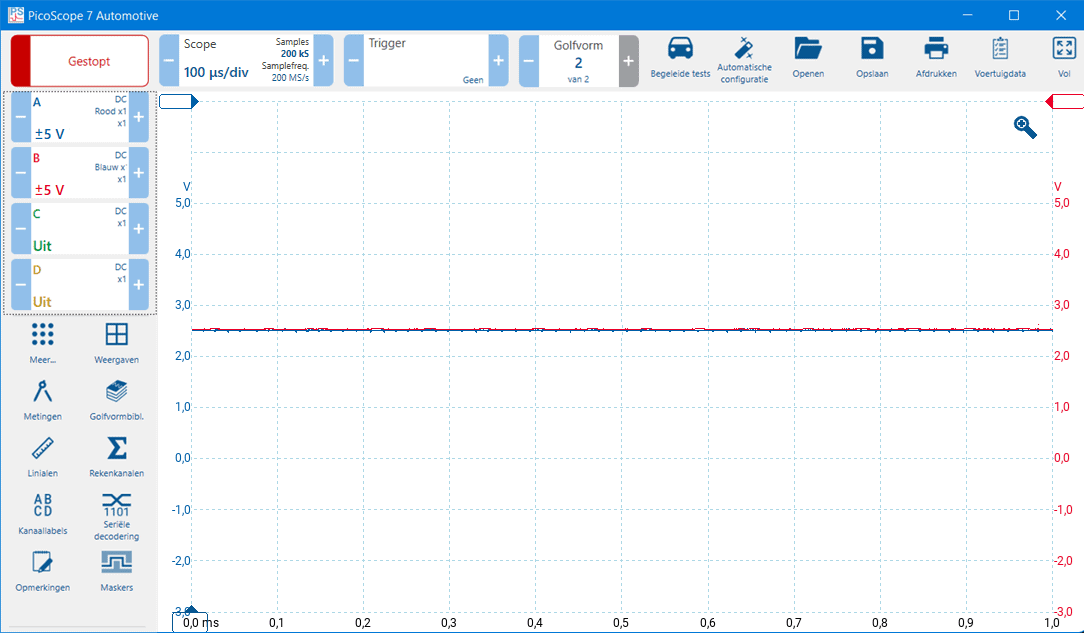
CAN-kõrge lühis koos CAN-madalaga:
CAN-low muutub üksteisega ühendamisel CAN-high pingeprofiiliks. Lühis CAN-high ja CAN-low vahel võib tekkida juhtmestikus, kus mõlema CAN-siini juhtme isolatsioon on läbi kulunud või ECU trükkplaadi defekti tõttu.
Alloleval pildil näeme kahe kanaliga mõõtmist, kus CAN-high ja CAN-low on omavahel lühises. Mõlema kanali pinge on 2,5 volti.
Diagnoos multimeetriga:
CAN-siini pingetasemete mõõtmine multimeetriga on ebamõistlik. Multimeeter kuvab keskmisi väärtusi paljude erinevate pingete juures, nii et õiget diagnoosi ei saa teha. Pingete mõõtmiseks tuleb kasutada ostsilloskoopi.
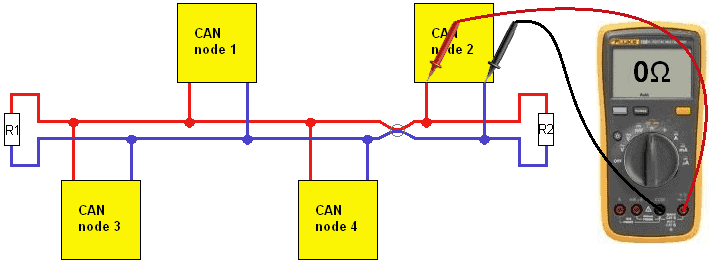
Multimeetri abil saame mõõta (ainult) otstakistitega kiire CAN-võrgu takistusi. Allolevad mõõtmised näitavad oomilist takistust kolmes erinevas olukorras: õigesti töötav süsteem, avatud juhe ja lühis CAN-high ja CAN-low vahel. Madala/keskmise (mugavusega) võrgus kasutatakse lõpptakisteid harva ja neid mõõtmisi ei saa teha.
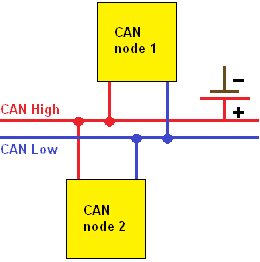
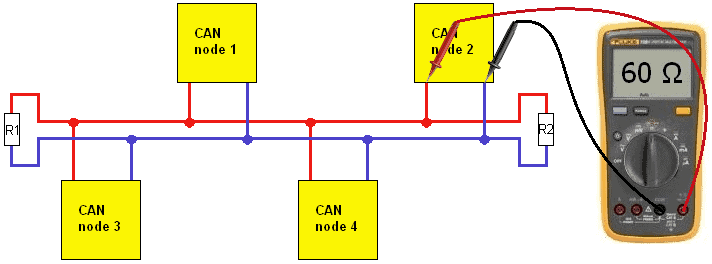
Häirevaba:
Lehel CAN-buss on kirjeldatud, et võrgus on kaks lõpptakistit. Lõpptakistite mõlema takistus on 120 oomi. Probleemideta süsteemis mõõdame asendustakistust 60 oomi CAN-high ja CAN-low vahel.
Pange tähele: saame seda mõõta ainult siis, kui kõigi juhtplokkide toide on välja lülitatud!
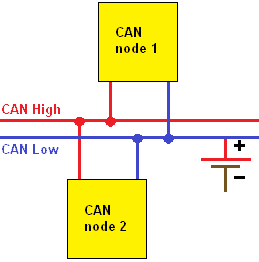
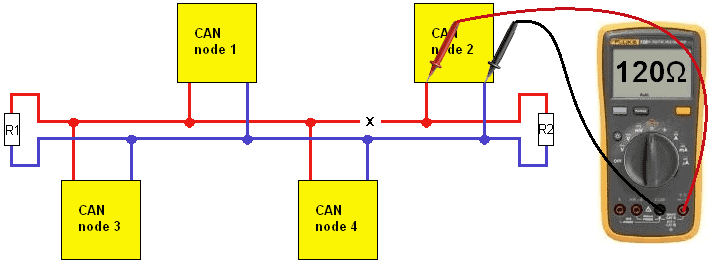
Katkestus:
CAN-kõrge või madala CAN-taseme juhtme katkestuse korral ei mõõda me enam asendustakistust 60 oomi. Joonisel mõõdame ainult takisti R2 väärtust (120 oomi).
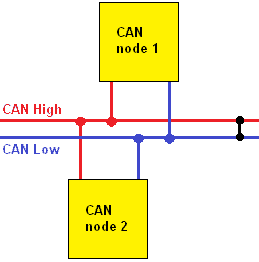
Lühis:
Olukorras, kus CAN-siini juhtmed ühenduvad üksteisega (st on lühises), mõõdame takistuse väärtust ligikaudu 0 oomi.
Järgmise rikke ajal katkevad mõlemad CAN-juhtmed. Nüüd on bussis palju häireid (müra). Sõlmed 1, 3 ja 4 saavad omavahel suhelda eeldusel, et häired ja peegeldus on liiga suured, põhjustades sõnumite moonutamist. Seega saavad sõlmed 2 ja 5 omavahel suhelda ka sama probleemi all.
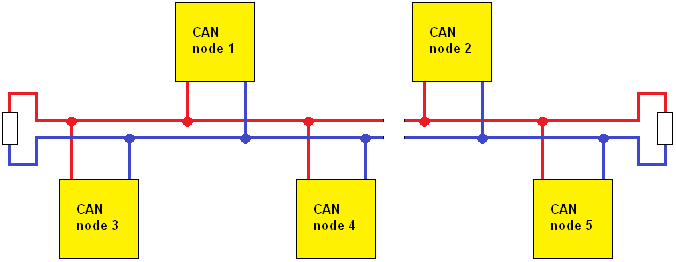
Mõned CAN-võrgud toimivad ka siis, kui üks juhe on katkenud. Veakoodid salvestatakse ja juhti teavitatakse hoiatustuledega erinevate süsteemide teadetega. Need on võrgud, mis on varustatud tõrketaluvusega CAN-transiiveriga. Olenevalt kasutatavast transiiverist võib esineda erinevat tüüpi tõrkeid ilma, et side sõlmede vahel katkeks. Need CAN transiiverid suudavad normaalselt toimida ka eelmainitud riketega lühistega plussiga ja maandusega (muidugi erinevate veateadetega).
Seotud leht: