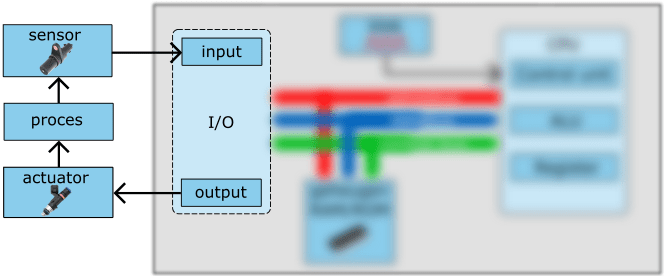
Eessõna: Enamasti tuleb andurite elektrilisi signaale enne protsessorile esitamist reguleerida. Täiturmehhanisme juhitakse arvuti teisel küljel. Need on sageli induktiivsed ahelad, mis lülitavad sageli suuri voolusid. Anduri signaalide ja ajami voolude reguleerimise riistvara nimetatakse liideseahelateks. Liidesahel tagab analoogi tõlke digitaalpingeks.
andurid edastada pinget madala vooluga. Liideseahel teisendab pinge digitaalseks väärtuseks (0 või 1). Voolutugevus on anduri signaaliga madal;
Täiturmehhanismid vajavad suuremat voolu. Ümber juhtajamid, asuvad ECU-s transistoride või FET-ide (kombinatsiooni) kujul, mida nimetatakse ka draiveriteks. Me käsitleme seda üksikasjalikumalt jaotises "Väljundsignaalid".
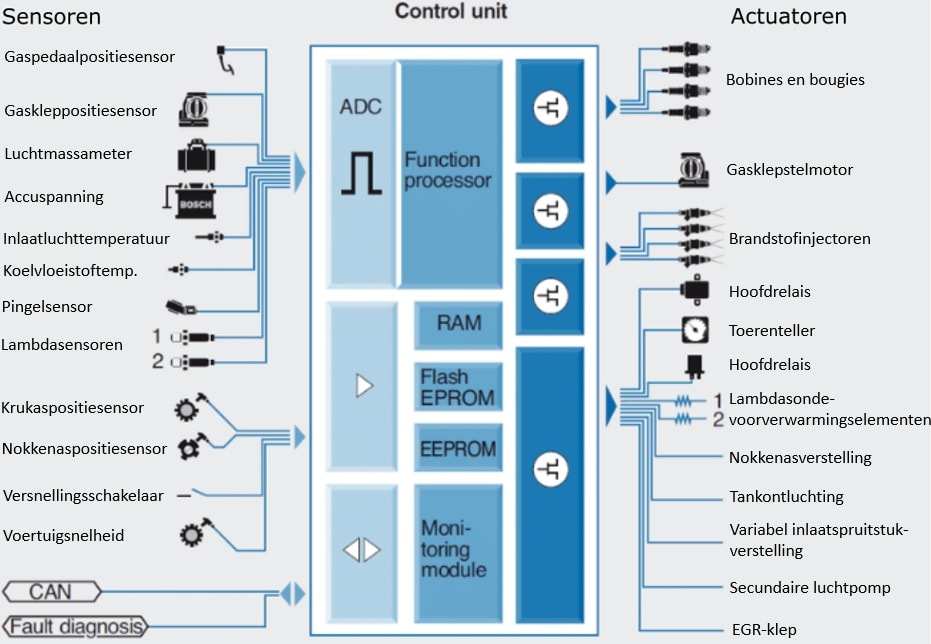
Alloleval pildil on (bensiini)mootori juhtimissüsteemi andurid ja ajamid. Ülemine andurite rühm (alates gaasipedaali asendiandurist kuni lambda-anduriteni) kuulub kategooriasse "analoog". See tähendab, et sissetulevad andurite pinged tuleb esmalt ADC-s (analoog-digitaalmuunduris) digiteerida. Alumine andurite rühm (väntvõlli asendiandur sõiduki kiirusandurile) annab oma signaali juba digitaalselt. Sisse-välja signaalid või plokkpinged rakendatakse otse protsessorile.
Parempoolseid ajamid juhitakse väljundastmega. Väljundaste, mida nimetatakse ka draiveriks, koosneb mitmest transistorist koosnevast ahelast, mis genereerivad täiturmehhanismi juhtimiseks kasutatavat pinget ja voolu arvuti juhtimpulssist.
Mootori juhtimissüsteem koos andurite (vasakul) ja täiturmehhanismidega (paremal)
Transistori transistori loogika (TTL): Protsessor töötab 5-voldise pingega. Seetõttu on sisend- ja väljundpinged piiratud vahemikus 0 kuni 5 volti (TTL tase, lühendatult Transistor Transistor Logic). Sellest pingetasemest kõrvale kalduvate signaalide puhul toimub reguleerimine liideseahelas.
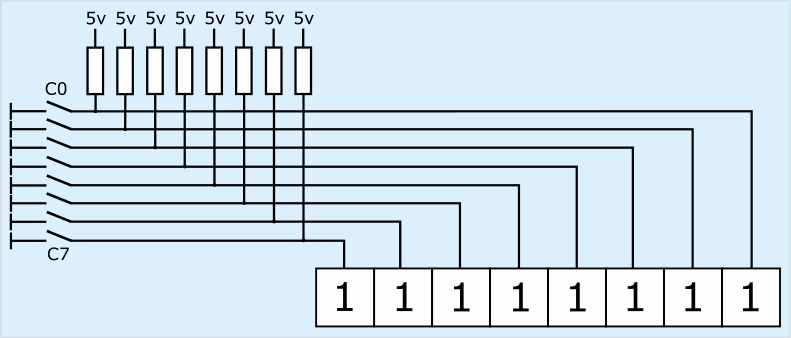
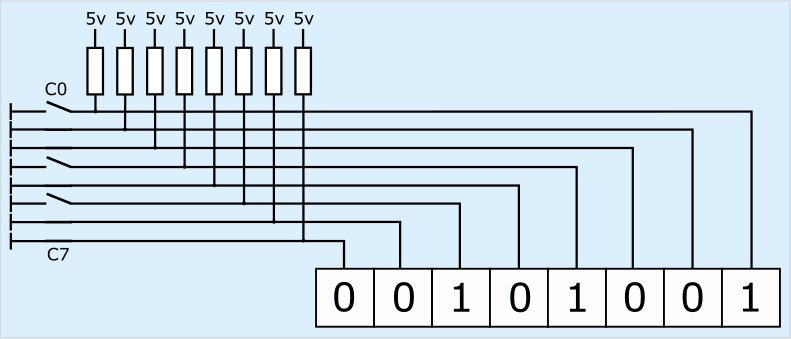
Allolevad pildid näitavad, kuidas 1 või 0 moodustatakse lüliti asendist. Tõmbetakisti abil annab 5-voldine pinge a loogiline 1 protsessori sisendil, kui lüliti on avatud. Tõmbetakisti pinge ei ole siis maandusega ühendatud. Kui lülitid sulguvad, tekib tõmbetakistil pingelangus. Pinge 0 volti protsessori sisendis on näha kui loogiline 0.
Kõik lülitid on avatud: 11111111 protsessori sisendil
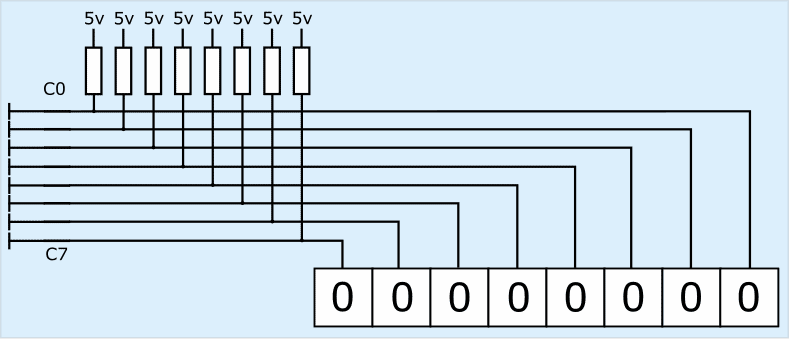
Kõik lülitid on suletud: 00000000 protsessori sisendil
Avatud ja suletud lülitite kombinatsioon annab üheliste ja nullide jada. Joonisel on 8-bitine sõnum protsessorile järgmine: 00101001.
8-bitise protsessori puhul loetakse kaheksa bitti üheaegselt tsükli kohta. Järgmise tsükli ajal, mis toimub kella järgmise tiksumise ajal (vt süsteemisiin ECU tööd käsitleval lehel) järgneb kaheksa uue bitiga jada.
Avatud ja suletud lülitid: 00101001 protsessori sisendil
Pingemuutust ei saa otse protsessoris töödelda. Esiteks tuleb mõõdetud pinge teisendada kümnendväärtuseks (0 kuni 255).
Vahemikuga 0–5 volti ja kümnendväärtusega 0–255 (nii 256 võimalust). Lihtne arvutus näitab, et kui jagada 5 volti 256 võimaluse peale, saab teha astmeid 19,5 mV (0,0195 volti).
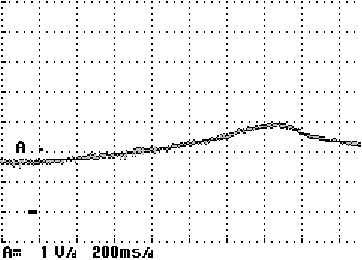
Ülaltoodud näide näitas turbo rõhuanduri pinge arengut ajas. Temperatuurianduri ja gaasipedaali asendianduri pingekõver on sama, ainult erinevas ajaraamis: jahutusvedeliku soojendamine võtab kauem aega kui turbo poolitamine.
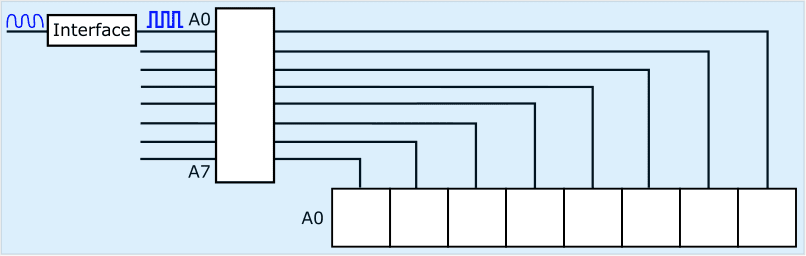
Selle jaotise alguses on pilt, mis näitab analoogsignaalide kategooriat. See näitab muu hulgas temperatuuriandurit ja gaasipedaali asendiandurit. Analoogpinge teisendatakse A/D-muunduris 8-bitiseks teabeühikuks. Paljudel mitme sisendviiguga protsessoritel on ainult üks A/D-muundur. Multipleksimise abil kombineeritakse mitu analoogsignaali üheks signaaliks.
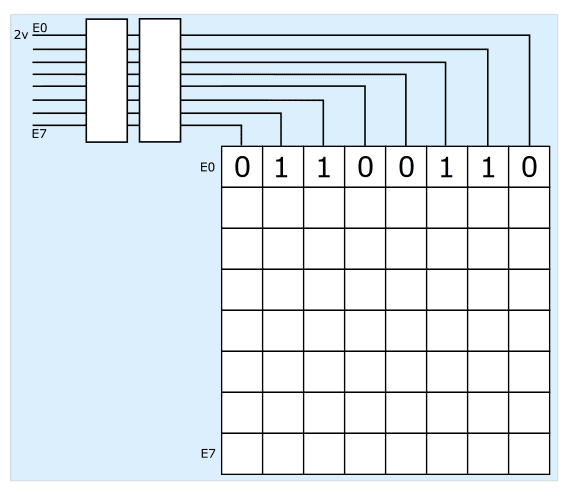
Selles näites näeme kaheksa sisendiga A/D-muundurit. Pin 0 on pinge 2 volti. Pinge E1 kuni E7 saab samaaegselt varustada pingega. Need teisendatakse multipleksimise abil ükshaaval digitaalseks sõnumiks.
2-voldine pinge teisendatakse kahendväärtuseks. Järgmise valemi abil saame teisendada analoogpinge kümnendväärtuseks ja seejärel teisendada selle kahendväärtuseks:
2v / 5v * 255d = 102d
Siin jagame sisendpinge (2v) maksimaalse pingega (5v) ja korrutame selle maksimaalse kümnendväärtusega (255).
Tehes arvutusi või sooritades korraliku triki, saame kümnendarvu 255d teisendada kahendväärtuseks 01100110. Vaata selle kohta lehte: kahend, kümnend, kuueteistkümnend.
8 bitine A/D muundur
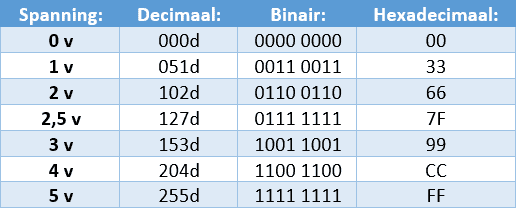
Järgmises tabelis on näidatud erinevate pingetega seotud kümnend-, kahend- ja kuueteistkümnendsüsteemi väärtused.
Reaalajas andmete lugemisel võidakse kuvada anduri signaali kümnend-, kahend- või kuueteistkümnendväärtus.
Pingesignaali <0,5 volti (025d) peetakse lühiseks maandusega;
Kui signaal tõuseb üle 4,5 volti (220d), tõlgib arvuti selle lühise positiivsega.
Pinge kümnend-, kahend- ja kuueteistkümnendsüsteemis
Impulssgeneraatori signaalide teisendamine digitaalseks sõnumiks: Impulssgeneraatorite, sealhulgas induktiivse väntvõlli asendianduri signaalid on tegelikult sisse-välja signaalid, mis tekivad pärast seda, kui impulsiratta hambad on andurist mööda liikunud. Enne signaali edastamist protsessorile tuleb anduri vahelduvpinge esmalt teisendada ruutlaine pingeks.
Joonisel näeme liidese vasakul küljel sinusoidset vahelduvpinget. Liidese elektroonikas muundatakse see vahelduvpinge ruutlaine pingeks. Seejärel loeb taimeri/loenduri plokk seda ploki pinget: kui impulss on kõrge, hakkab loendur loendama ja lõpetab loendamise, kui impulss muutub taas kõrgeks. Loendite arv on perioodi aja mõõt. signaali sagedus.
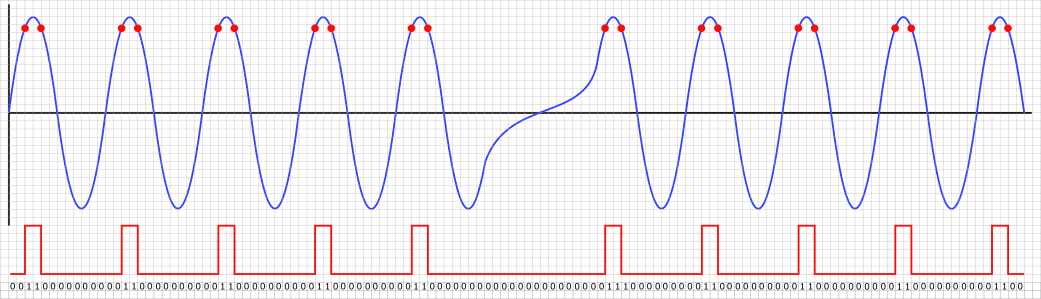
Alloleval pildil näeme signaali induktiivse väntvõlli andurilt, mille ülemistel külgedel on punased täpid. Punased punktid on seatud pingele, mis suurendab (loogika 1) või vähendab (loogika 0) ploki pinget. Seletus jätkub selle pildi all.
Sinusoidne vahelduvpinge ja digiteeritud signaal ilma hüstereesita
Anduri pinge pole aga kunagi täiesti puhas. Pingeprofiilis on alati väike kõikumine. Sel juhul võib liidese elektroonika näidata seda valesti loogilise 0-na, kuigi tegelikult peaks see olema 1.
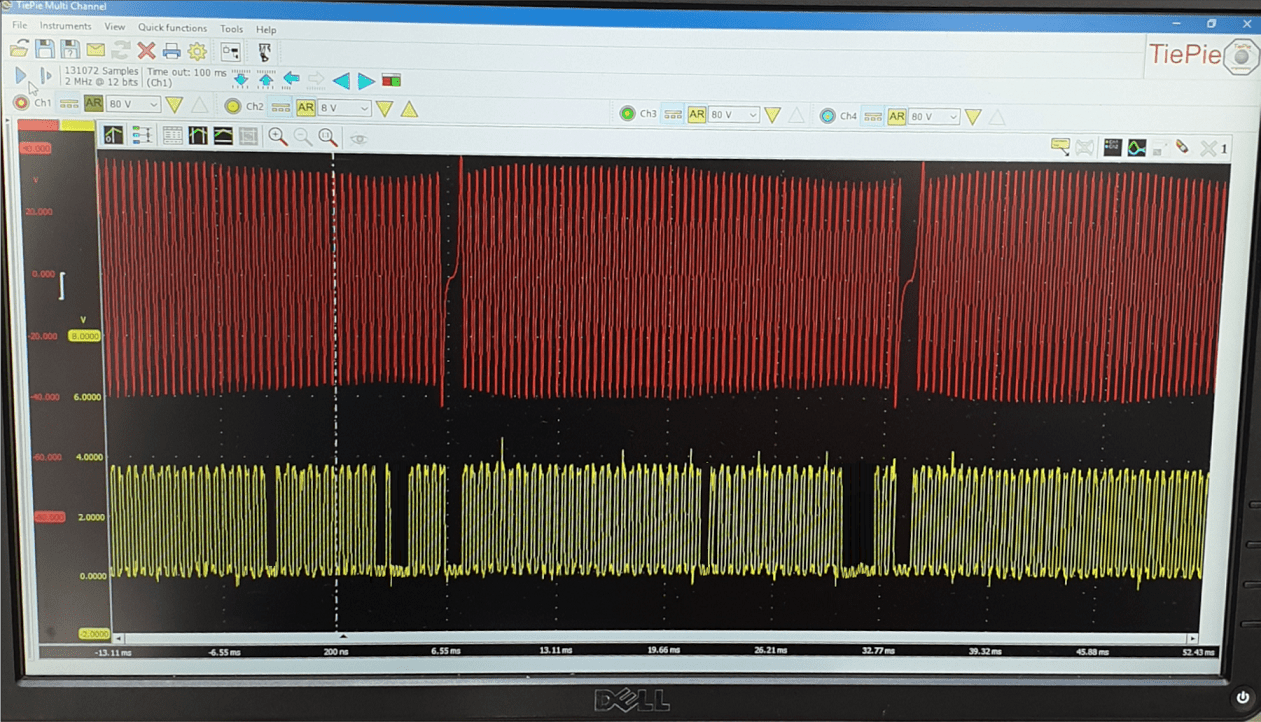
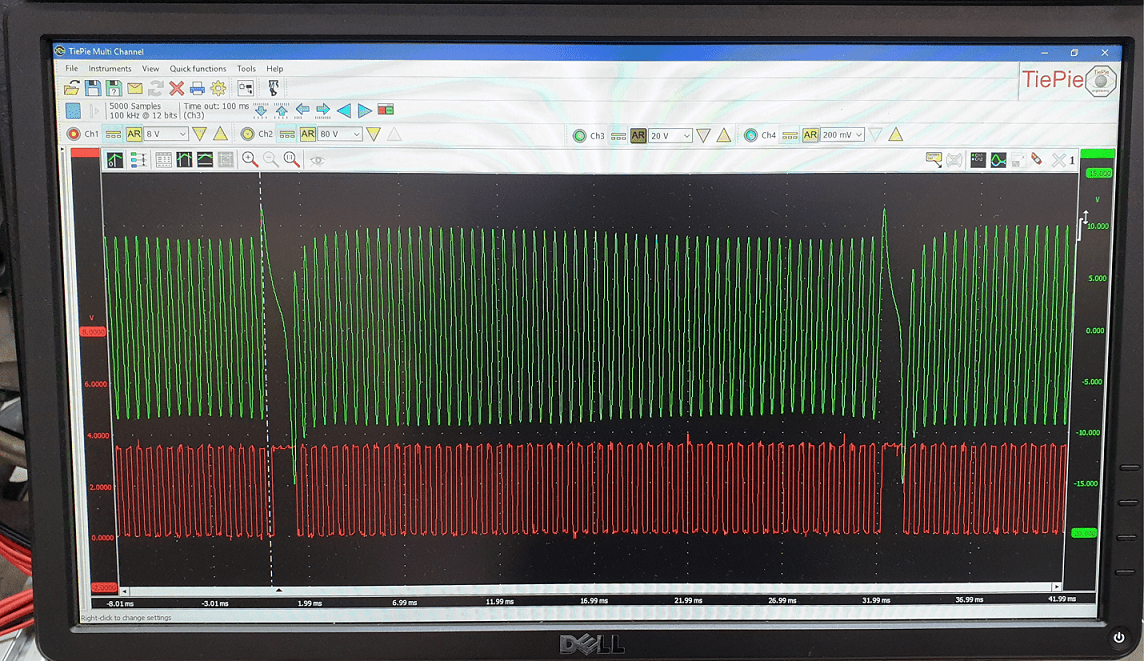
Allolev skoobi pilt salvestati selle käitamise ajal BMW Megasquirt projekt. Skooppildil on näha induktiivse väntvõlli signaali (punane) digitaliseerimine (kollane). Pildilt on selgelt näha, et kollases plokksignaalis on impulsse puudu, samas kui väntvõlli signaalis ei möödu sel hetkel ühtegi puuduvat hammast.
Ebapuhas digitaalsignaal sisaldab vigu: see teave puudub
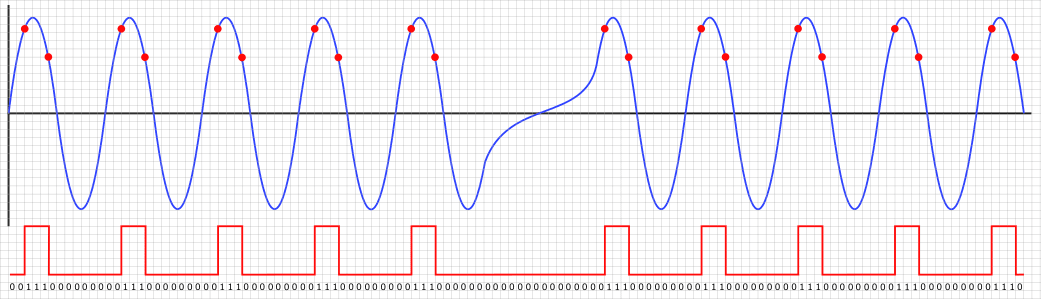
Tagamaks, et pingeprofiili väikesed kõikumised ei põhjustaks ECU poolt valet tõlgendust, on sisse ehitatud nn hüsterees. Hüsterees on pingeprofiili tõusva ja langeva serva vahe. Alloleval pildil näeme, et punased täpid tõusvatel servadel on kõrgema pingega kui punased täpid langevatel servadel. Nii saame olla kindlad, et signaali väikesed kõikumised ei mõjuta digitaalset teisendamist.
Esimeses lõigus, kus alustasime impulsssignaali muutmisest digitaalseks signaaliks, oli juba mainitud, et signaali sagedus määratakse ruutsignaali kahe tõusva serva vahelise aja alusel. Nendest näidetest võib selgelt järeldada, et hüsterees küll mõjutab ruudukujulise signaali laiust, kuid ei mõjuta tõusvate servade vahelist aega ja seetõttu ei mõjuta see signaali sagedust.
Õigesti seatud hüstereesi korral muundatakse siinussignaal õigesti kasutatavaks nelinurklainepingeks, kusjuures puuduva hamba läbipääsu kohtades on ainult mitu loogilist.
Pange tähele, et MegaSquirt ECU seadistamise ajal muudeti sätteid, sealhulgas käivitumist tõusvatel ja langevatel joontel. Selle tulemusena on esimeses näites puuduva hamba läbimisel pinge 0 volti ja alloleval skoobipildil on pinge 5 volti.
Puhta ja õige ruutlaine pingega impulssgeneraatori signaal
Väljundsignaalid: Väljundsignaalid koosnevad digitaalsetest sisse- ja väljalülitusimpulssidest pingevahemikuga 0 kuni 5 volti (TTL tase) ja väga madala voolutugevusega. Täiturmehhanismid vajavad aga juhtimist kõrgema pingetaseme ja vooluga. Sisse/välja signaale saab impulsi laiusmoduleerida (PWM), kus impulsi laius võib muutuda konstantse sagedusega.
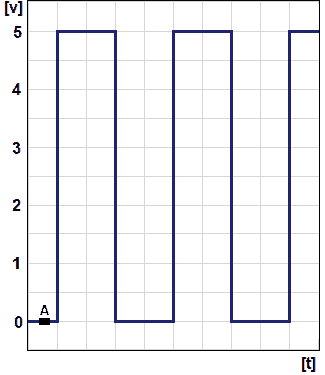
Järgmisel joonisel on kujutatud ruutlaine pinget TTL tasemel aja funktsioonina. The töötsükkel sellest PWM-signaalist on 50%.
Täiturmehhanismide juhtimiseks on vaja draivereid. Digitaalse väljundsignaaliga saab vajaliku voolu saavutada draiveriga. Järgmises osas käsitleme juhte.
Näide: PWM signaal
Leiame draivereid igast ECU-st ja mõnest täiturmehhanismist, näiteks DIS-i süütepoolidest. Draiverit nimetatakse ka väljundastmeks või võimsustransistoriks. Draiver võimaldab teisendada väljundsignaale TTL tasemel: 0 kuni 5 volti, madala vooluga 1 mA ECU-st kuni 14 volti pingeni ja kuni ligikaudu 10 A vooluni.
Juht saab ühendada mitu transistorid sisaldama. Me nimetame sellist transistorit "Darlingtoni transistor“. Järgmised pildid näitavad järgmisi vooluringe:
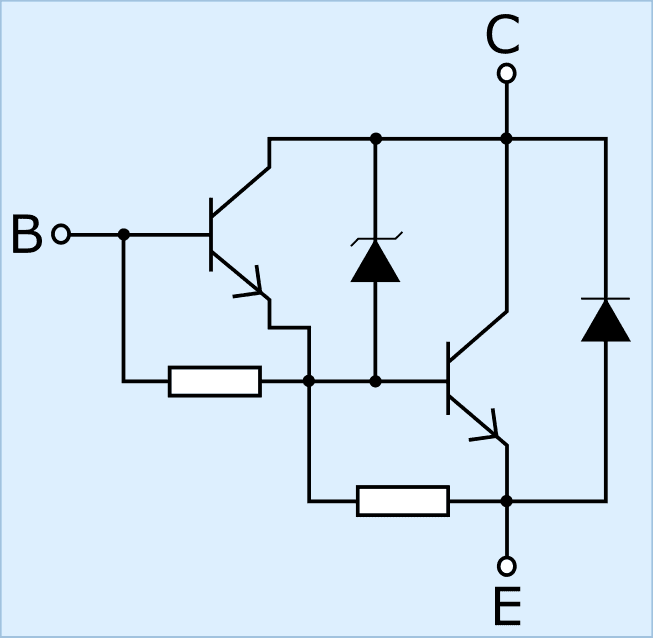
Kahe süütepooli juhtimiseks mõeldud transistoriga Darlingtoni vooluahela skeem (allikas: andmeleht BU941ZR).
Kaks transistorit, mõlemal Darlingtoni vooluring (BU941ZR)
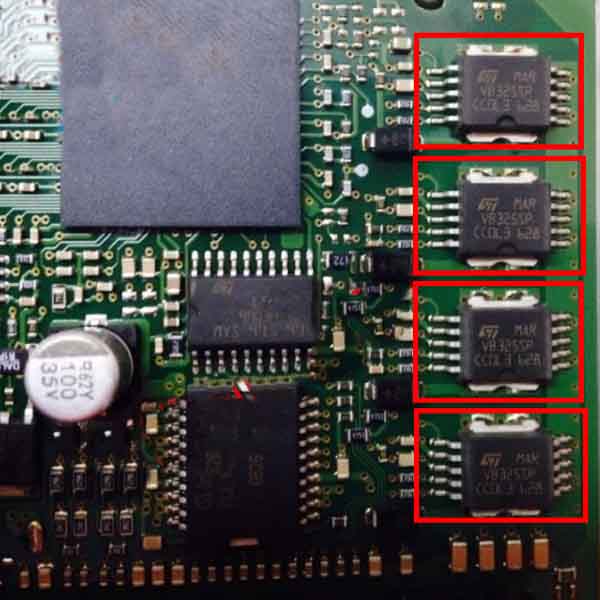
Draiveri IC-d Darlingtoni ahelatega ja lisaelektroonika muuhulgas temperatuurikaitseks ja tagasisideks mikroprotsessorile.
1. Darlingtoni ringrada
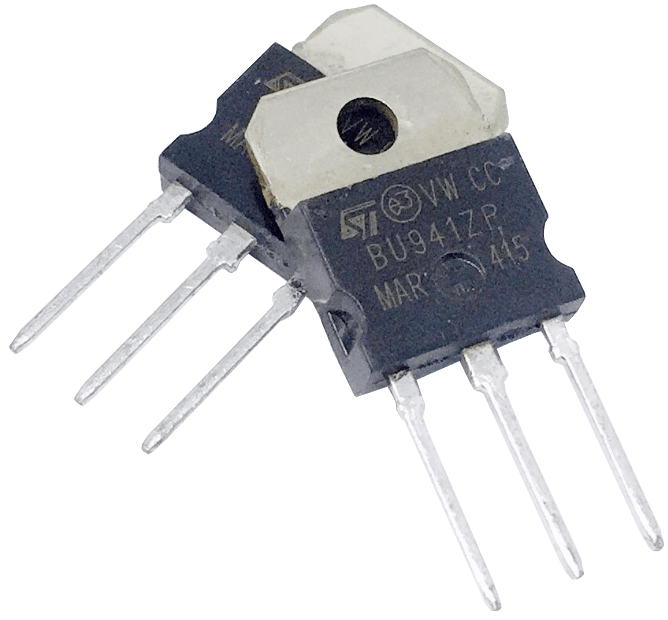
2. Darlingtoni transistorid (2x)
3. Mitme Darlingtoni ahelaga draiveri IC-d
Lehel: täiturmehhanismide juhtimismeetodid Lähemalt käsitletakse passiivsete, aktiivsete ja intelligentsete ajamite juhtimist (võimsus)transistori ehk FET-i abil.