Teemad:
- Sissejuhatus
- Arukas akuandur
- Akuanduri komponendid ja mõõtmispõhimõtted
- Aku laadimine ja vahetamine
Eessõna:
Kaasaegsetes sõidukites kohandatakse generaatori laetuse olekut vastavalt oludele. Generaatorit juhitakse mootori ECU-st ja see saab signaale, et laadida rohkem või vähem. Generaator genereerib energiat, kuna rootori ja staatori vahele tekib magnetväli. Mida suurem on magnetväli, seda rohkem jõudu on vaja rootori pööramiseks. Suure laadimisvoolu genereerimine kulutab seega energiat ja kütust.
- Tühikäigu kiirust saab suurendada, kui aku on peaaegu tühi, kui laadimine pole piisav;
- Maksimaalse kiirenduse ajal generaatorit ajutiselt ei juhita, et kasutada kogu tekitatud pöördemomenti tõukejõuks;
- Aeglustamisel (mootori pidurdamine) juhib ECU generaatorit maksimaalselt, nii et sõiduki kineetilist energiat kasutatakse generaatoris energia genereerimiseks. Joonisel on näidatud aku maksimaalne laetus (12-voldine süsteem).
Intelligentse akuanduri signaali kasutatakse aku laetuse oleku määramiseks. See on üks olulisemaid andmeid, mille alusel saab määrata, mil määral generaatorit juhtida.

Intelligentne akuandur:
Kaasaegsed sõidukid on peaaegu kõik varustatud akuanduriga, mida sageli tuntakse kui IBS-i (Intelligent Battery Sensor), vooluanduri või akumonitoriga. Selles artiklis viitame terminile "akuandur". Akuandur töötab tihedas koostöös sõidukis oleva aku jälgimissüsteemiga (BMS). See kehtib eriti käivitus- ja seiskamissüsteemiga sõidukite kohta. Nendes sõidukites on aku korduvalt tugeva koormuse all, kuna käivitusmootor aktiveeritakse mootori käivitamiseks mitu korda sõidu jooksul. Seetõttu valitakse sellistes sõidukites traditsioonilise pliielemendi asemel sageli AGM-aku. AGM-aku on vastupidavam korduvale tühjenemisele ja laadimisele.
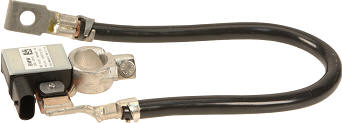
Akuandur on integreeritud maanduskaablisse, mis on kinnitatud aku negatiivse klemmi ja kere või šassii maanduspunkti vahele. Akuandurilt leiate kahe või enama juhtmega pistiku. Üks juhe viib otse aku plussklemmile ja teine juhe on sidepidamiseks.
Akuanduri korpuse sees on mikroprotsessoriga trükkplaat ja pinget, voolu, temperatuuri ja aega mõõtev kontroller. Selle elektroonilise juhtseadme (ECU) andmed edastatakse sageli LIN-siini kaudu generaatorisse ja mugavusjuhtimisseadmesse (BCM) või mootori juhtseadmesse. Lüüs asub sageli akuanduri ja BCM-i või mootori juhtseadme vahel, et teisendada LIN-siini teade CAN-siini teateks. Seda käsitletakse täpsemalt jaotises "Intelligentse akuanduri diagnostika".
Akuandur jälgib aku seisukorda ja mõõdab järgmisi parameetreid:
- Aku pinge.
- Vool, millega akut laetakse ja tühjeneb.
- Aku temperatuur.

Akuandur saadab need andmed mootori juhtseadmele või BCM-ile. Neid andmeid kasutades arvutab ECU (elektrooniline juhtseade) järgmise:
Aku laetuse olek (SOC). Mõõtes tarbijatele väljuvat voolu ja aku sissetulevat voolu, saab määrata, kui palju energiat akus veel saadaval on.
Aku seisukord (State Of Health, SOH). Aku kvaliteedi hindamiseks võrreldakse aku pinget ja tühjendusvoolu. Käivitamisel saab väikese bensiinimootoriga akust võtta kuni 60 A või raskema diiselmootoriga kuni 120 A voolu. Aku pinge languse ulatus näitab aku sisemise takistuse taset. Kui pinge langeb 11,5 A voolu juures 10-lt 60 voltile, on see vastuvõetav. Kui pinge langeb sama käivitusvooluga 11,5-lt 8 voltile, näitab see aku liiga suurt sisetakistust ja vajab väljavahetamist.
Vaikne vool seisu ajal. See tuvastab puhkevoolu häire, näiteks volitamata tarbija poolt. Suurenenud puhkevoolu tuvastamisel saab juht järgmise sõidu ajal teate.
Akuanduri komponendid ja mõõtmispõhimõtted:
Akuanduri korpus ja maandusklemm on sageli integreeritud üheks tervikuks. Maanduskaabel võib moodustada ka akuanduriga terviku või kinnitada kruviühendusega. Akuanduri sees on väga madala takistuse väärtusega šunditakisti. Mõõtes selle šundi pingeerinevust, saab arvutada voolu. Koos aku pingega saab arvutada võimsust, millega akut laetakse või tühjeneb.
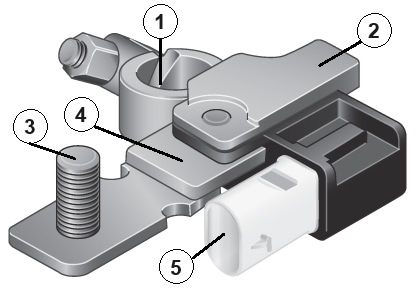
1. Pole klambriga maanduspost;
2. Patarei andur;
3. Sõiduki maandusühendus;
4. Šunt;
5. B+ ja LIN siini pistikühendus.
Šunditakisti asetatakse järjestikku sõiduki maandusühenduse ja aku negatiivse klemmi vahele. Kogu vool akusse ja akusse läheb läbi selle šundi. Madala takistuse väärtuse tõttu kulub šundis vähe pinget.
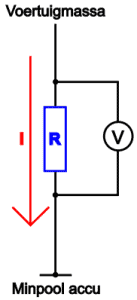
Selle pinge tase teisendatakse mikroprotsessoris vooluks koos šundi teadaoleva takistuse väärtusega:
- Suur pingelang šundis näitab suurt voolu.
- Madal pingelangus näitab madalat voolu.
Lisatud pildil näeme diagrammi, kus takisti R tähistab šunti ja vool I tähistab tühjendusvoolu aku tühjenemise ajal. Voltmeeter, mis on paigutatud paralleelselt üle šundi takisti, illustreerib, kuidas akuanduri mõõteelektroonika mõõdab selle šundi pingeerinevust.
Allolev pilt annab ülevaate temperatuuri, pinge ja voolu mõõtmise kohtadest.
Šundi takistust tähistab number 5. Pingeerinevus (V) šundi vahel loetakse vooluks (A). Need andmed saadetakse LIN-siini kaudu DME/DDE-le, mis tähistavad BMW bensiinimootorit (DME) ja diiselmootorit (DDE).
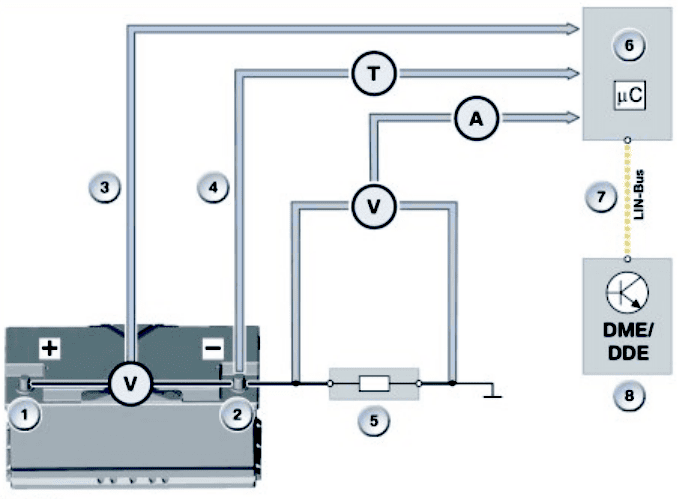
1. Aku positiivne poolus;
2. Aku maandusklemm;
3. Aku pinge mõõtmine;
4. Aku temperatuuri mõõtmine;
5. Voolutugevuse mõõtmine šunttakisti abil;
6. Mikroprotsessor intelligentses akuanduris;
7. LIN siini sidejuhe
8. Mootori juhtseade
Aku laadimine ja vahetamine:
Akuhaldussüsteem kasutab akuandurit, et mõõta akusse ja sealt välja voolavat voolu ning salvestada see teave mällu. Kui akut on vaja laadida või kui kasutatakse käivitusabi, on oluline, et akulaadija ei oleks ühendatud otse aku klemmidega, vaid laadimispunktidega. Akuandur asub nende laadimispunktide ja akuklemmide vahel ning suudab energiavoogu mõõta ainult siis, kui akulaadija on laadimispunktidega ühendatud. Kui akulaadija on ühendatud otse akuklemmidega, annab BMS-i mälu märku, et aku on (peaaegu) tühi, kuigi tegelikult on see täielikult laetud. Seejärel laadib generaator akut üle, misjärel süsteemis tekib talitlushäire. Allolevatel piltidel on akulaadija, mis on ühendatud otse aku ja kapoti all olevate laadimispunktidega.


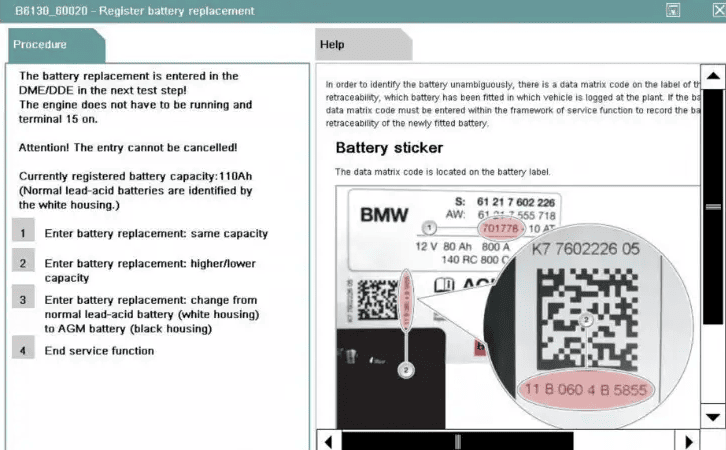
Pärast aku vahetamist tuleb aku registreerida sõidukil, mis on varustatud akuanduriga. Töötoas nimetatakse seda ka “õppimiseks” või “kodeerimiseks”. Akuhaldus võtab arvesse:
- aku vananemine. Suurenenud sisetakistusega vanema aku laadimisvoolu saab suurendada;
- aku mahtuvus ja külmkäivitusvool.
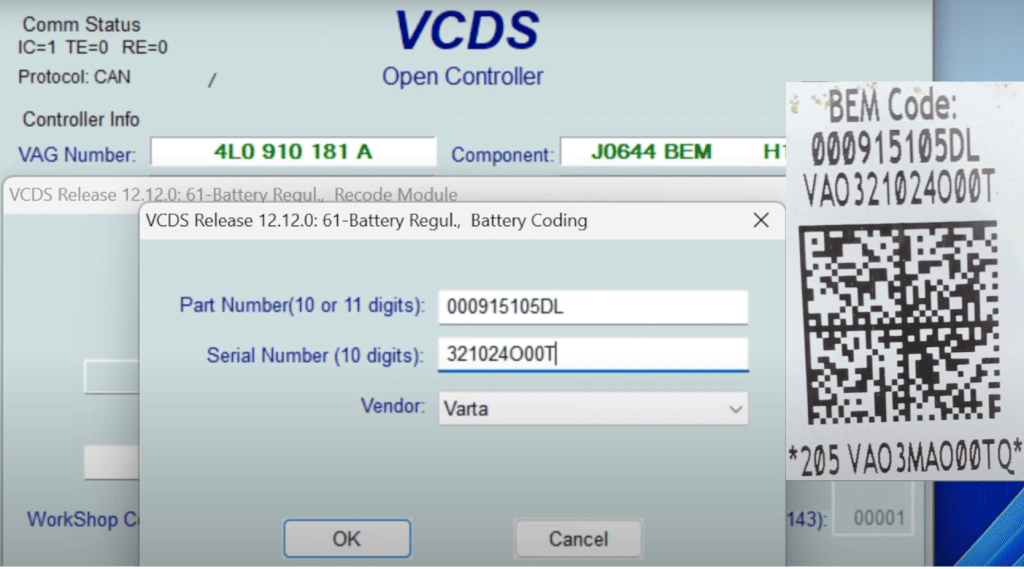
Salvestamise ajal kustutatakse aku salvestatud väärtused, mis on aja jooksul halvenenud. Nii et isegi kui on paigaldatud identne sama marki ja sama võimsusega ja külmkäivitusvooluga aku, tuleb vahetus registreerida. Loomulikult tuleb erinevate omadustega aku andmed teatavaks teha. Seda saab teha käsitsi võimsuse [Ah] ja külmkäivitusvoolu [A] sisestamisega või osanumbrite või seerianumbrite sisestamisega. Kaasaegse diagnostikaseadmetega saab skannida aku kleebisel näidatud QR-koodi.
Allolevad ekraanipildid näitavad aku registreerimist BMW programmiga (vasakul) ja VCDS-iga (paremal).
Intelligentse akuanduri diagnoos:
Nutikas akuandur suhtleb generaatori ja BCM-i või mootori juhtseadmega. Selles jaotises selgitatakse, kuidas diagrammi lugeda ja diagnoosi panna.
Järgmisel diagrammil näeme akuandurit (A85), mis on varustatud 2-voldise toitepingega kontakti 12 kaitsme abil. Pin 1 on side jaoks: siit saadetakse sõnum LIN-siini kaudu lüüsile (A25di) ja generaatorile (O01). Kontaktid 1 ja 2 asuvad eelmistel piltidel nähtavas kahe kontaktiga pistikus.
Akuanduri alumisel kahel mustal juhtmel ei ole pin-numbrit: see on otseühendus aku negatiivse klemmiga.
Nutikas akuandur saadab lüüsile ja generaatorile LIN-siiniteate. Lüüs on ristmik erinevate protokollidega (pinged ja kiirused) võrkude vahel. Lüüsis saadetakse LIN-siini teade CAN-siini kaudu BCM-ile ja/või mootori juhtseadmele. Seevastu üks neist kahest juhtseadmest juhib generaatorit lüüsi ja LIN-siini kaudu.
LIN-siinide side rike võib tähendada, et akuanduri andmeid ei saa kasutada või generaatorit ei juhita korralikult. Viimasel juhul lülitub generaator avariiprogrammile, milles piisava laadimispinge ja laadimisvoolu tekitamiseks kasutatakse tavalist D+ juhtimist.
Pinge kulg LIN siini signaal saab ühega ostsilloskoop mõõdetakse hindamiseks.
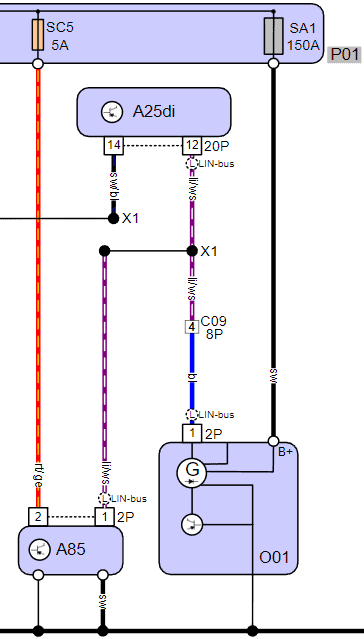
Legend:
P01Komplekt: mootoriruumi kaitsmekarp
A25di: diagnostikaliides (lüüs)
A85: ECU aku andur
O01: dünamo
Kui on rike ja LIN siini side on korras, teame, et anduri toitepinge ja maandus on korras. Rikke põhjustab üks selle diagrammi komponentidest. Võib astuda järgmisi samme:
- kontrollige juhtseadmete tarkvarauuendusi;
- Testige 12 V akut (soovitavalt koormuse all);
- kontrollige, kas aku õiged andmed on registreeritud. Aku võidi varem välja vahetada, kuid registreerimist ei tehtud;
- lähtestada akuanduri andmed;
- kontrollige, kas generaatori osa number on õige: vale generaator, mis ei vasta andurile, põhjustab lõpuks probleeme;
- Kui ülaltoodut on kontrollitud ja leitud, et see on õige, võib järeldada, et akuandur on defektne. See juhtub mõnikord sagedase (vale) käivitamise korral hüppaja kaablite või akuvõimendi kaudu.
Seotud lehed: