Teemad:
- ESP üldine
- ESP muud nimed
- Alajuhitavus
- Ärritunud
- Roolinurga andur
- Põikkiirenduse andur (G-andur)
- Lengerdusmomendi andur (lengerdusandur)
- Pidurirõhu andur
ESP üldine:
ESP on lühend elektroonilisest stabiilsusprogrammist ja töötab koos ABS-i ja ASR-iga. Kui sõiduk on varustatud ABS-i (Anti-Block Braking System) ja ASR/ASC-ga (libisemisvastane reguleerimine / juhtseade), saab ESP-süsteemi lisada mitmete täiendavate andurite ja tarkvaralise reguleerimise abil. ESP-süsteemis kasutatakse ka selliseid komponente nagu ratta pöörlemiskiiruse andurid ja ABS-pump/juhtseade. ESP-süsteem reguleerib ka mootori võimsuse vähendamist; gaasihoova rohkem kinni keerates või süüte välja lülitades.
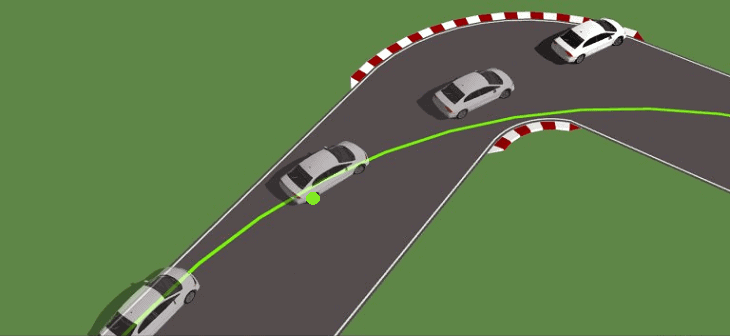
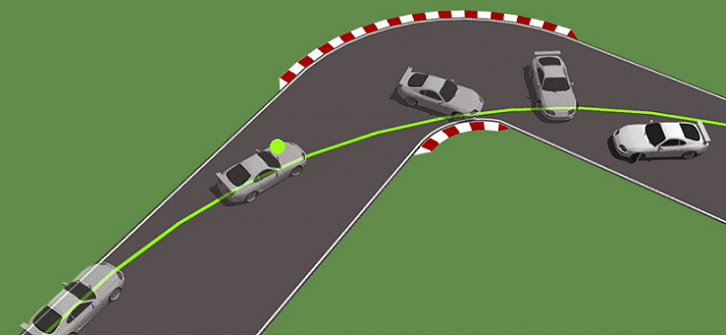
ESP-süsteemi eesmärk on parandada käitumist kurvides (ala- ja ülejuhitavus). See kehtib muu hulgas olukordade kohta, kus kurvis pidurdatakse või kui toimub kõrvalehoidmine. ESP-süsteem pidurdab sõiduki üht ratast, nii et normaalsed juhtimisomadused taastuvad. Allpool on toodud 2 olukorda, kus roheliselt tähistatud ratast pidurdatakse. Pidurdades järgib sõiduk rohelist joont, selle asemel et väljuda kontrolli alt. Erinevaid vajalikke ESP komponente kirjeldatakse selle lehe allosas.
ESP muud nimed:
Autotootjad kasutavad sageli oma mudelite puhul ESP jaoks oma nimesid, kuigi toiming on sama. Need muud nimed on antud selleks, et süsteem näeks välja "luksuslikum" kui tavaline ESP. Selle näited on järgmised:
- ASC + T: automaatne stabiilsus- ja veojõukontroll (vana põlvkonna BMW alates aastast 1996)
- DSC: Dünaamiline stabiilsusprogramm: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: dünaamiline stabiilsus- ja veojõukontroll (Volvo)
- ESP: elektrooniline stabiilsusprogramm (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagen
- PSM: Porsche stabiilsusjuhtimine (Porsche)
- VDC: sõiduki dünaamiline juhtimine (Alfa Romeo)
- VDCS: sõiduki dünaamiline juhtimissüsteem (Subaru)
- VSC: sõiduki stabiilsuskontroll (Lexus, Toyota)
- VSA: sõiduki stabiilsusabi (Honda)
Alajuhitavus:
Alajuhitavus tekib siis, kui esirehvidel ei ole enam piisavat haardumist teepinnaga. Auto teeb ettenähtust õrnema pöörde, mistõttu on kalduvus otse sõita. Seetõttu libisevad esirattad kurvist väljapoole. Alajuhitavuse saab välistada, et tagada esirataste taas piisav haardumine teepinnaga. Selle saavutamiseks võite kasutada vähem gaasi või juhtida vähem. Alajuhitavuse vastu ei aita veelgi suurem roolivõime, vaid võib isegi hullemaks muuta, sest ratastel jääb ainult väiksem haardumine. Enamik autotootjaid reguleerib šassii nii, et autol on kalduvus pigem alajuhitavusele kui ülejuhitavusele. Põhjus on selles, et keskmine juht laseb sellises olukorras kohe gaasi välja (mis võib olla lahendus, mis annab autole taas haarde).
Ärritunud:
Ülejuhitavus tekib siis, kui tagarehvid ei haaku enam teepinnaga. Auto tagarehvid libisevad kurvist väljapoole. Tagumine tahab siis eesmisest mööduda, mistõttu sõiduk pöörleb ümber oma telje. Ülejuhitavust saab korrigeerida tagaveoliste autode (nt BMW) puhul vasturoolimise ja pidurdamisega ning esiveoliste autode (nt Volkswagen) puhul veidi rohkem gaasiga. Tihti, eriti autospordis, kasutatakse teadlikult ülejuhitavust, et kurvikombinatsioonist kergemini ja kiiremini läbi sõita. Äärmuslikul juhul nimetatakse seda ärrituse vormi "triivimiseks". Ülejuhitavus on üldiselt ohtlikum kui alajuhitavus, sest enamik juhte ei suuda seda parandada. Seetõttu on auto disainimisel šassii rohkem reguleeritud "alajuhitavuse" poole, sest seda on lihtsam korrigeerida.
Roolinurga andur:
Roolinurga andur on paigaldatud roolisambale. See võib olla roolilati lähedal, aga ka sisemuses suunatulede / klaasipuhastite hoobade vahel, nagu on näidatud parempoolsel pildil. Need on BMW roolisamba lülitid.
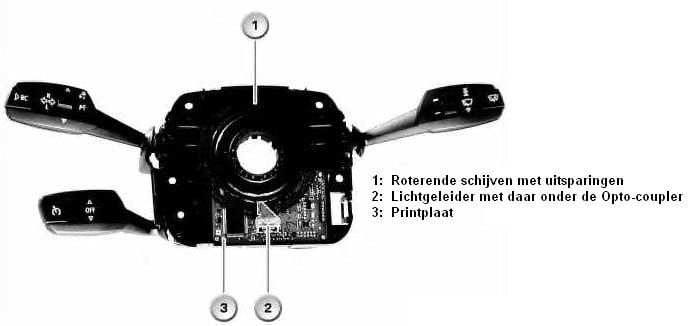
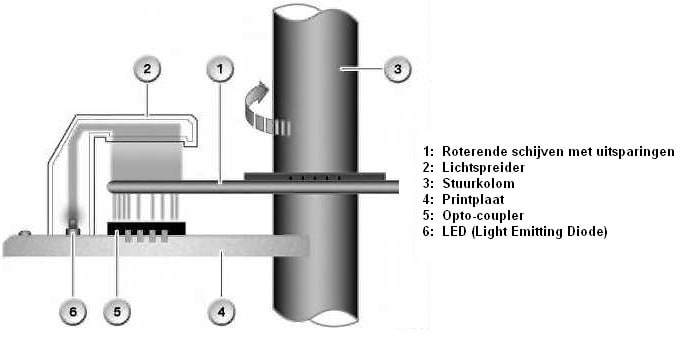
Roolinurga anduri ülesanne on mõõta rooli pöördenurka. See andur kasutab ühte või mitut opto-sidurit, mis mõõdavad pöörlevate ketaste valguse läbilaskvust. Valgusvahed on pöörleva ketta igas kohas erinevad, võimaldades tuvastada rooli täpse asukoha. Kõik ketaste süvendid loovad asümmeetrilise ruudukujulise signaali. Opto-sidur suudab valgussignaali teisendada pingeks, mis edastatakse seejärel juhtseadmele.
Põikkiirenduse andur (G-andur):
Külgkiirenduse andur (nimetatakse ka G-jõudude G-anduriks) on paigutatud võimalikult palju auto keskele. Kurvides nihkub liigutatav plaat (vt allolevat pilti, number 2) kondensaatorite (1) vahel. Kondensaatorite pinge on 5 volti. Kui plaat on keskel (st kui auto sõidab otse) on mõlema kondensaatori pinge 2,5 volti. Kui auto teeb pöörde (vasakpoolse pildi puhul), nihkub plaat tsentrifugaaljõu ja tsentripetaaljõu mõjul ühele küljele.
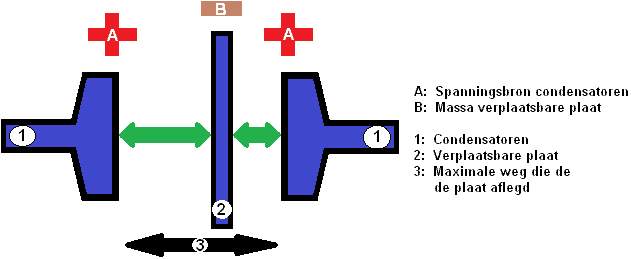
Kui plaat nihkub, langeb parempoolse kondensaatori mahtuvus. See ei ole nüüd 2,5 V, vaid näiteks 1,5 V. ESP juhtplokk tunneb ära kahe kondensaatori erinevuse ja saab selle järgi määrata, kui suur on tsentrifugaaljõud või tsentripetaaljõud (ehk kui järsult tehakse kurv. Nii saab kindlaks teha, kas auto on näiteks ülejuhitav) . Selle külgkiirenduse anduri väärtusi kasutatakse ratta kiirusandurite andmete võrdlemiseks ja ESP-süsteemi sekkumise määramiseks.
Lengerdusmomendi andur (lengerdusandur):
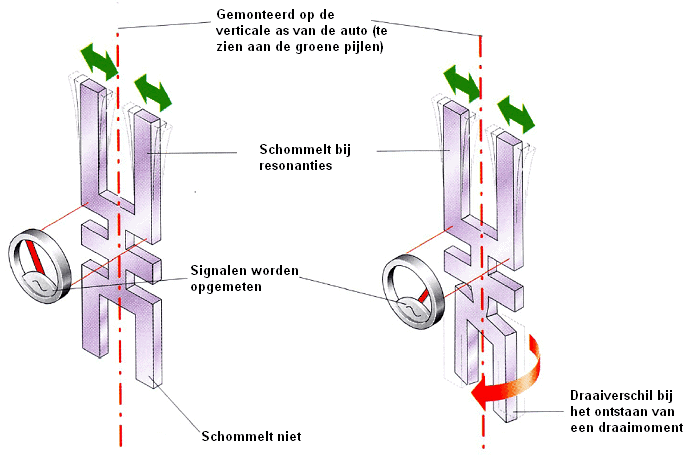
Lengerdusmomendi andur, mida inglise keeles nimetatakse ka “Yaw sensor”, on paigutatud võimalikult palju auto keskele koos külgkiirenduse anduriga. Andur annab andmeid, mida ESP süsteem vajab. Lengerdusmomendi andur registreerib sõiduki kalduvuse pöörata ümber vertikaaltelje. Selle mõõtmise väärtust nimetatakse pöörlemiskiiruseks ja seda kuvatakse kraadides sekundis.
Andur koosneb kahest hääletusharust. Ülemine häälehark paneb vahelduva pingega vibreerima (resonantsi) sagedusel 11000 Hz (11kHz) ja pöörleb, kui sõiduk läbib kurvi. Mida teravam on kurv, seda rohkem on alumine häälehark ülemise kahvli suhtes väändunud. Põhimõte põhineb güroskoopilistel jõududel (Coriolise jõud). Kui pöörlev osa väändega positsioonist välja viia, tekivad güroskoopilised jõud. Sellest ka nimi pöördemomendi andur.
Väände tõttu tekitab piesoelement pingeerinevuse, mida mõõdetakse juhtseadmega. Tekkiv pinge varieerub vahemikus 0 kuni 5 volti. Puhkeasendis (kui pöörlemist ei registreerita) annab andur välja 2,5 volti.
Pidurirõhu andur:
Pidurisüsteemi (mõlemal ahelal) on lisatud ka eraldi hüdrorõhuandurid, mis on näha allolevatel piltidel. Vanemate autode puhul asuvad need andurid piduritorudes. Tänapäeval on pidurirõhuandurid tavaliselt ABS-süsteemi enda hüdrosõlme sisse ehitatud. See seade on sageli kapoti all nähtav. Sellega on ühendatud kõik hüdraulilised piduritorud.

