Asignaturas:
- Introducción
- Sistema de autobús
- Procesador (CPU)
- memoria RAM
- memoria ROM
Introducción:
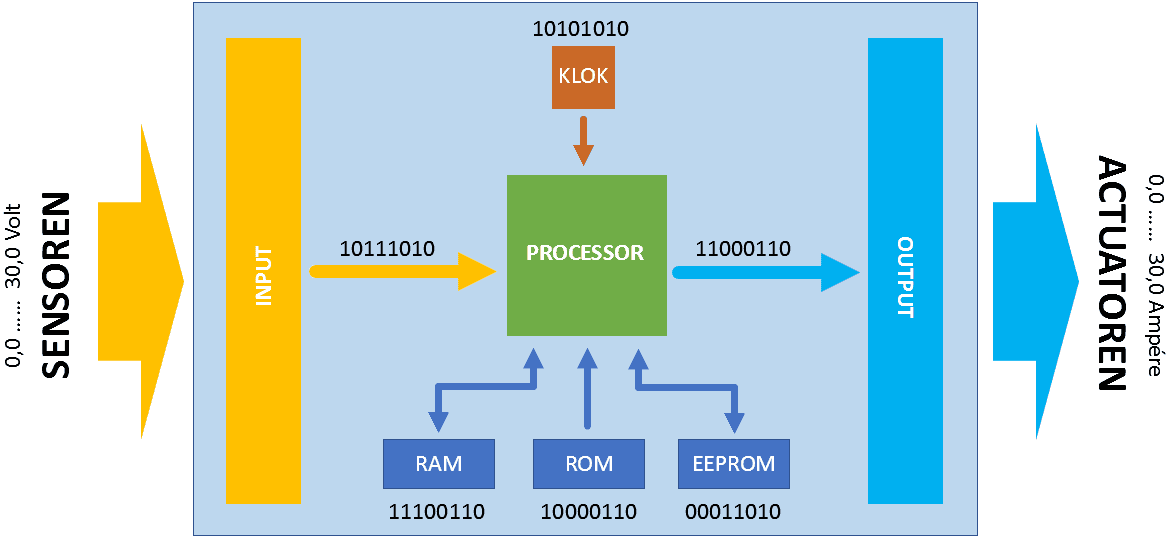
Una ECU recibe o datos de medición de sensores, procesa la información y realiza cálculos para controlar los actuadores. La siguiente figura muestra un diagrama de bloques de un sistema de control.
Los sensores son sensores que responden a una cantidad física. La electrónica del sensor la convierte en una señal eléctrica. La ECU recibe esta señal eléctrica como "entrada" y compara esta señal con el valor preprogramado. Dependiendo de para qué sirve la señal, el control se realiza ajustando correspondientemente el control del actuador.
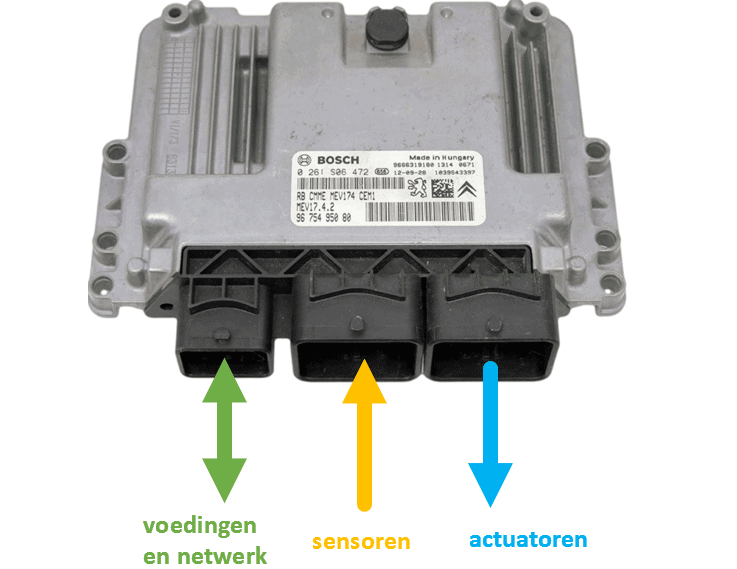
La siguiente figura muestra una ECU con tres conexiones de enchufe. De izquierda a derecha: alimentación y red, sensores, actuadores.
En el sistema de gestión de un motor de gasolina encontramos, entre otros, los siguientes sensores:
- sensor de posición del cigüeñal para medir la velocidad del cigüeñal;
- sensor de temperatura del refrigerante para medir el calentamiento del refrigerante;
- sensores de posición del acelerador para medir la posición de la válvula de mariposa y, por tanto, la carga del motor;
- MAP o medidor de masa de aire para medir la presión negativa o el flujo de aire;
- sonda lambda para medir el contenido de oxígeno en los gases de escape;
- el sensor barométrico y los sensores de temperatura del aire de admisión;
- Sensor de detonación para hacer avanzar el encendido lo más posible.
Los sensores anteriores sirven como entrada para controlar los inyectores y las bobinas de encendido. Para ello se buscan todos los valores de los sensores en un campo característico preprogramado.
Tomemos como ejemplo el control del inyector. Al ralentí, los inyectores inyectan un número x de grados después del PMS.
- A baja temperatura del refrigerante se prolonga el tiempo de inyección (enriquecimiento);
- Al acelerar suavemente, el tiempo de inyección también se prolonga. También se realiza una medición que registra la rapidez con la que se pisa el pedal del acelerador: cuando se acelera bruscamente a fondo, se produce un enriquecimiento adicional;
- La presión negativa en el colector de admisión influye en el momento y la duración de la inyección;
- La sonda lambda (por ejemplo, la sonda de salto) mide si la mezcla es demasiado rica o demasiado pobre. Si la mezcla es demasiado pobre para varias rotaciones del cigüeñal, el tiempo de inyección se prolonga utilizando los reguladores de combustible hasta que la mezcla vuelva a ser estequiométrica;
- El sensor barométrico y el sensor de temperatura del aire de admisión miden la presión y la temperatura del aire para determinar el nivel de oxígeno en el aire aspirado.
Por tanto, la duración de la inyección depende de los valores de hasta cinco sensores. En los motores modernos intervienen aún más sensores.
Durante y después de controlar un actuador, los sensores envían información a la ECU. El valor medido se compara con el valor deseado en el software. Esto se puede utilizar para determinar si el control de un actuador puede permanecer constante, debe acortarse o ampliarse. Por tanto, la ECU actúa como controlador, creando un bucle de control.
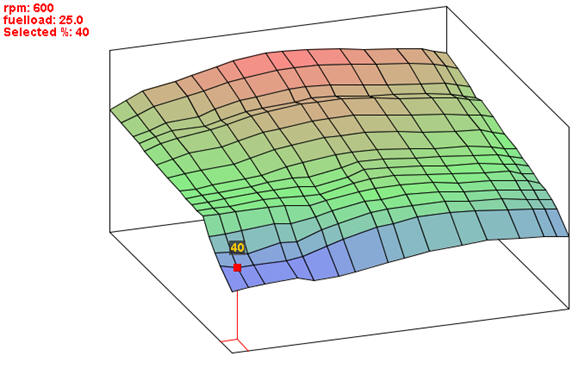
La siguiente figura muestra un diagrama en el que el tiempo básico de inyección se determina a partir de la velocidad del cigüeñal en comparación con la depresión en el colector de admisión, que es una medida de la carga del motor. Las temperaturas y la sonda lambda forman un factor de corrección y cada una tiene su propio campo característico.
Sistema de autobús:
El bus del sistema realiza conexiones entre los componentes de la ECU (consulte la imagen a continuación). En la parte superior de la ECU encontramos el reloj. Este llamado oscilador produce una tensión de onda cuadrada con una frecuencia habitual de 16 mHz. La frecuencia del reloj determina la velocidad de la unidad de control. Los componentes de un circuito de control se coordinan mediante este temporizador.
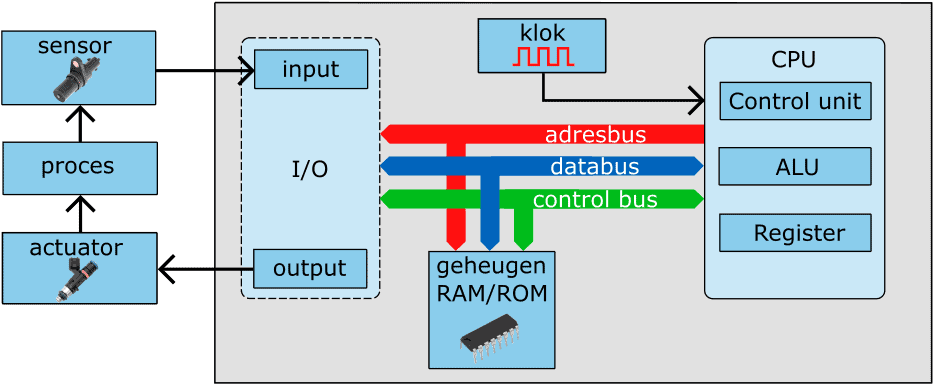
La CPU, la memoria y la interfaz I/O (I/O significa: entrada/salida) están interconectadas a través de un bus del sistema, que consta de varias conexiones en la placa de circuito impreso. Podemos dividirlos en:
- bus de direcciones: este bus asegura la transferencia de datos desde el microprocesador a determinadas ubicaciones de memoria;
- bus de datos: los datos entre la memoria, la CPU y las interfaces se transportan a través del bus de datos;
- Bus de control: sirve como controlador al realizar selecciones, solicitudes y restablecimientos de lectura y escritura en función de la sincronización del reloj del sistema.
Procesador (CPU):
El procesador (Unidad Central de Procesamiento) es el corazón de la computadora. Los circuitos combinacionales, que constan de un enorme número de puertas AND, OR y NOT, se construyen en la ECU mediante software. Durante la fabricación del procesador se incorporan una serie de instrucciones (el software). Estas instrucciones realizan acciones y las ponen en el orden correcto. Ejemplo:
- las letras del alfabeto se almacenan digitalmente en el procesador. En realidad, no serán letras, sino instrucciones digitales que representan acciones simples;
- poniendo las letras en el orden correcto podemos formar palabras;
- al poner las palabras en el orden correcto podemos formar oraciones;
- las frases componen la historia: en realidad el programa de ordenador.
El programador ha integrado en el software el programa para poner las instrucciones conocidas por el procesador en el orden correcto. Este programa se carga en la memoria flash de la ECU.
Cuando se inicia la ECU, las instrucciones se recuperan de la memoria flash y el procesador las ejecuta una por una, de acuerdo con el reloj. Una vez que el programa se ejecuta y finaliza, el ciclo comienza de nuevo.
Los datos necesarios para cargar datos como los tiempos de encendido se cargan desde la memoria ROM. El procesador arranca desde la memoria ROM y copia datos de la ROM a la RAM. Después del arranque, la CPU recupera todos los datos y comandos de la rápida memoria RAM. Se necesita una memoria RAN relativamente pequeña para almacenar temporalmente datos y valores intermedios calculados.
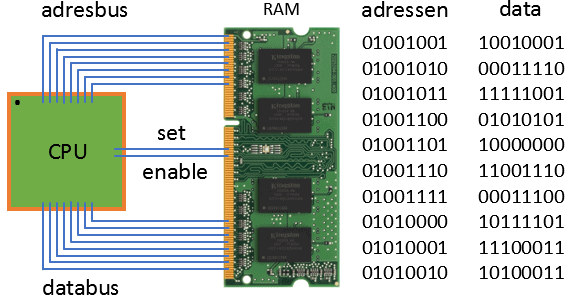
La CPU está conectada a la memoria a través de un bus de direcciones y un bus de datos.
- Conjunto: los bits se almacenan en la RAM
- Habilitar: los bits se recuperan de la RAM
Los bits y bytes de datos en la RAM pueden incluir:
- números: datos de sensores / datos a actuadores / cálculos
- Direcciones de sensores (entrada) y actuadores (salida).
Los datos en la RAM pueden ser:
- letras: códigos ASCII, números, letras, símbolos
- instrucciones: conjunto de instrucciones del procesador
El procesador funciona según la llamada ISA (Arquitectura de conjunto de instrucciones) o un conjunto de instrucciones. La ISA es una lista de instrucciones programadas por el fabricante y utilizadas por el procesador. La ISA difiere según el procesador y depende en gran medida de la aplicación para la que se utiliza el procesador. A continuación se muestran algunos ejemplos:
- CARGAR el procesador recupera un valor de la memoria RAM
- STORE el procesador almacena un valor en la memoria RAM
- AÑADIR el procesador suma dos números
- CLR el procesador borra un valor en la memoria RAM
- COMPARAR el procesador compara dos números entre sí
- SALTAR SI el procesador salta a una dirección de memoria específica en la RAM (condición de comparación)
- OUT el procesador envía información a una salida
- EN el procesador solicita información de una entrada
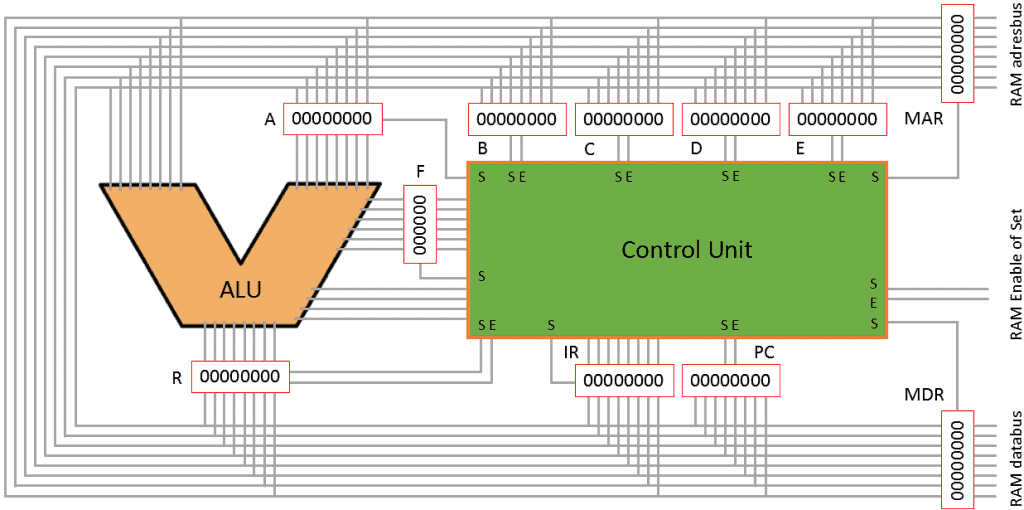
Para que un procesador funcione a la máxima velocidad de reloj, utiliza memoria RAM interna. Estos se denominan "registros". Los registros son bloques de funciones particularmente importantes en muchos sistemas digitales. Consisten en una colección de circuitos flip-flop que pueden contener temporalmente (y así recordar) un número binario. Los diferentes tipos de registros son:
- Registro A: registro para entrada A a ALU
- Registro B: registro para entrada B a ALU
- Registro de trabajo: propósito general, para almacenar resultados (provisionales)
- Registro de instrucciones: aquí se almacena la instrucción actual que se ejecutará para el procesador.
- Registro de dirección (contador de programa): contiene la dirección de la siguiente instrucción a ejecutar
- Registro de bandera: el número (después de un cálculo) es: cero, negativo, positivo, demasiado grande, par o impar
- Registro de coma flotante: número con dígitos después del punto decimal
- Registro de desplazamiento: memoria en la que los datos se desplazan un bit durante cada pulso de reloj.
- Registro de datos de memoria: búfer entre CPU y RAM para datos de memoria
- Registro de dirección de memoria: búfer entre CPU y RAM para la dirección de memoria
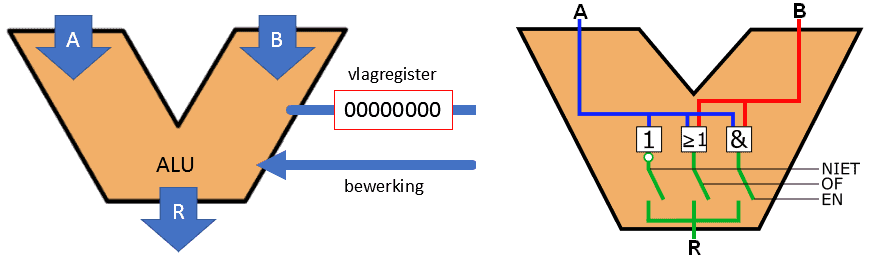
La ALU (Unidad Aritmética Lógica) realiza todas las operaciones aritméticas y lógicas (Y, O, NO, etc.).
- 2 entradas a ALU: A y B
- 1 entrada: qué operación debe realizar la ALU
- 1 salida: R (Resultado) va a un registro
- 1 salida: registro de bandera
1. La ALU quiere enviar 01010101
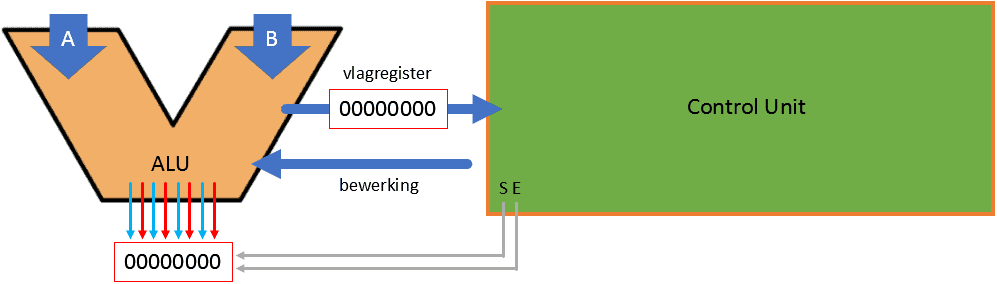
2. Primero la Unidad de Control debe crear el conjunto “1”.
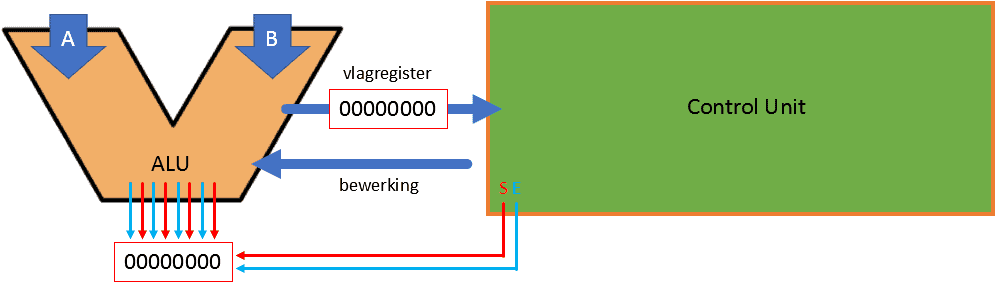
3. El registro está completo.
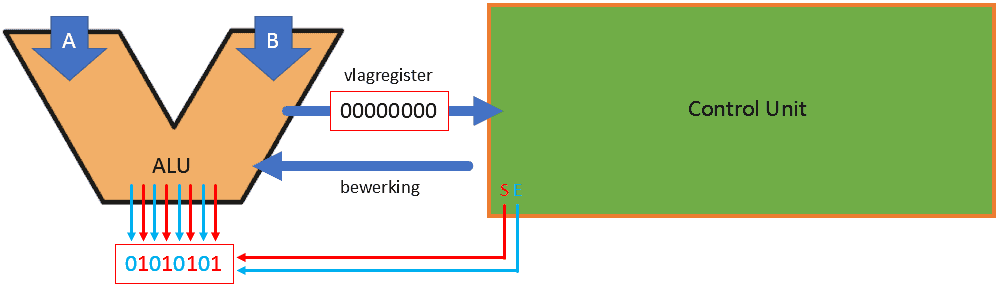
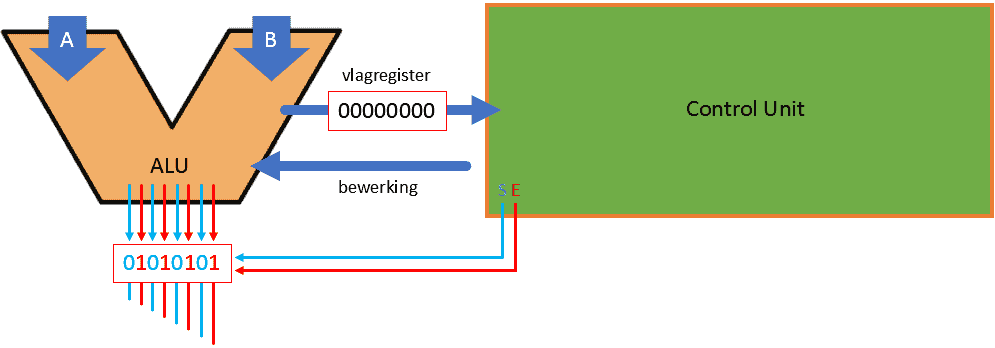
4. Después de esto, se habilita “1”.
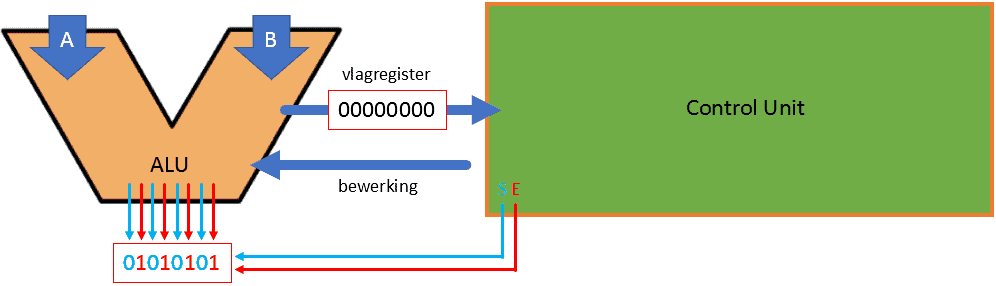
5. Los datos de la ALU se colocan en un autobús.
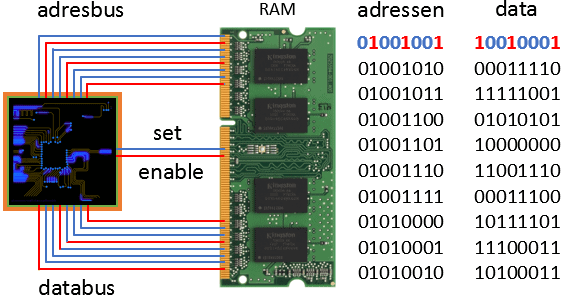
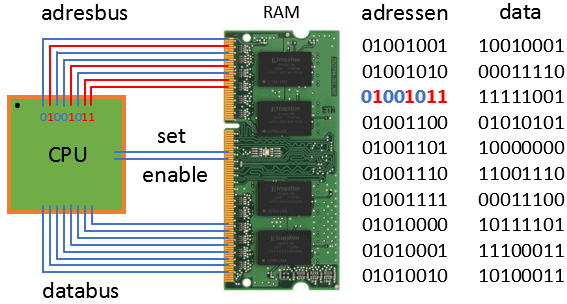
La CPU quiere recuperar datos de la RAM:
1. La CPU envía una dirección a la RAM (01001001)
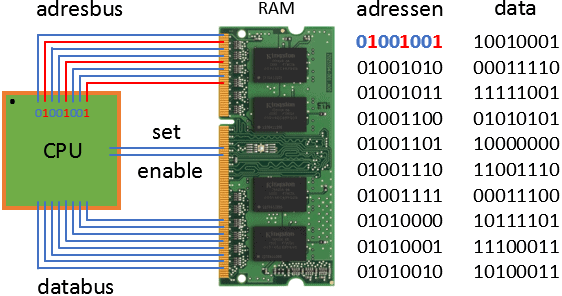
2. La CPU quiere recibir información; “habilitar” = 1
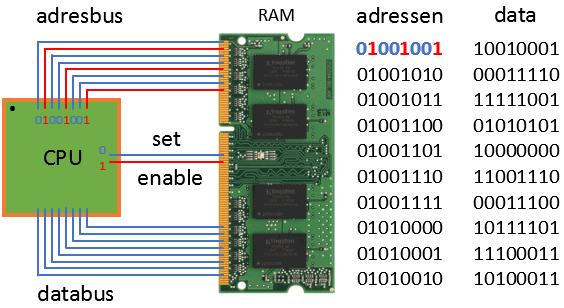
3. La RAM envía datos desde la dirección 01001001 a la CPU.
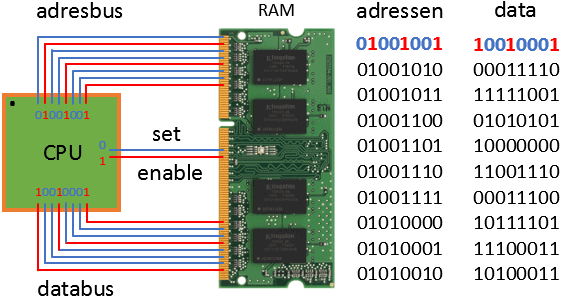
4. La CPU procesa la información.
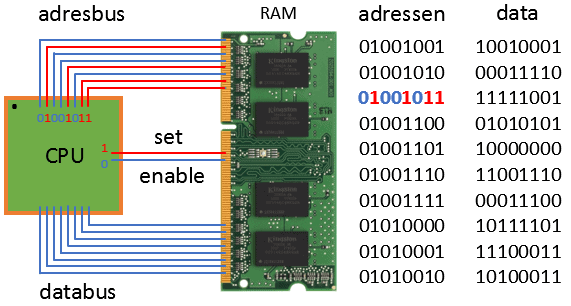
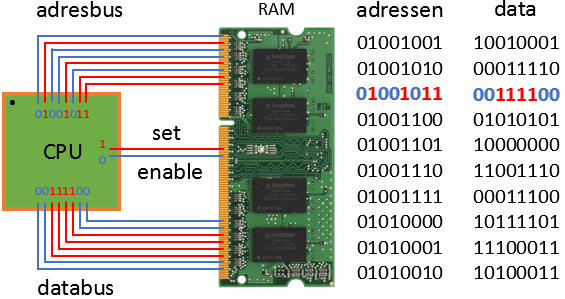
La CPU quiere almacenar datos en la RAM:
1. La CPU envía una dirección a la RAM (01001011)
2. La CPU quiere almacenar información; “conjunto” = 1
3. La CPU envía datos (00111100) a la dirección 01001011 en la RAM.
Los datos en la RAM ahora se sobrescriben de: 11111001 a: 00111100
Memoria ROM:
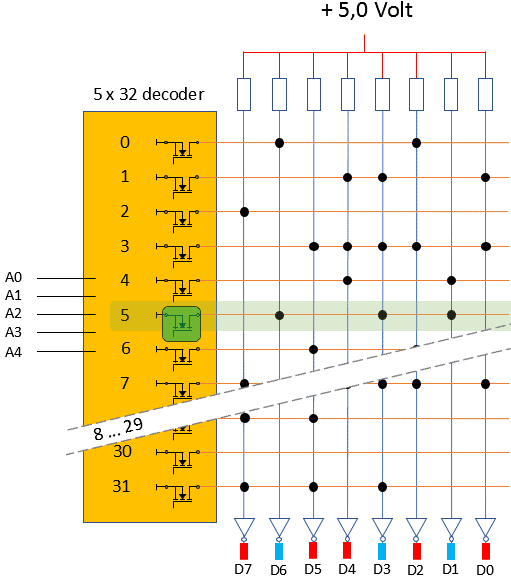
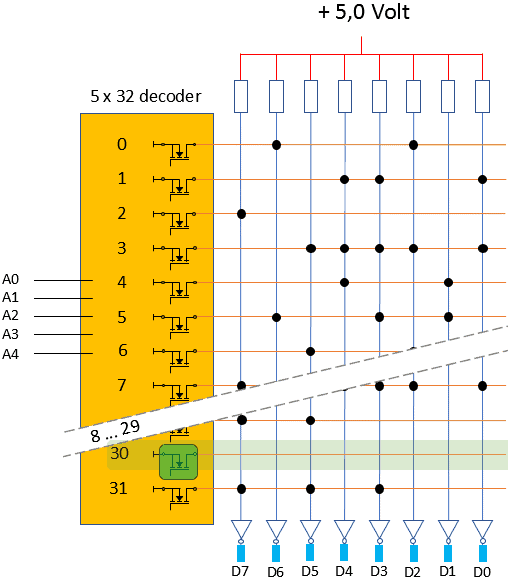
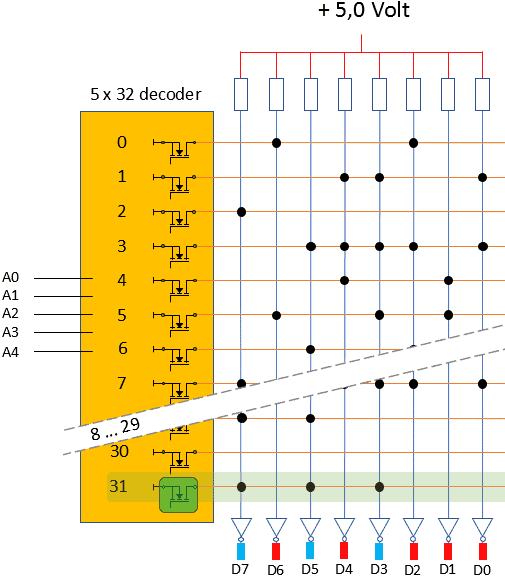
ROM es una abreviatura de: Memoria de sólo lectura. Esta memoria ha sido programada por el fabricante. El circuito de memoria está dispuesto con conexiones fijas. La ECU inicia el programa de software (arranque) desde la memoria ROM. La memoria ROM es una memoria lenta. Durante el inicio, los datos se copian de la ROM a la RAM.
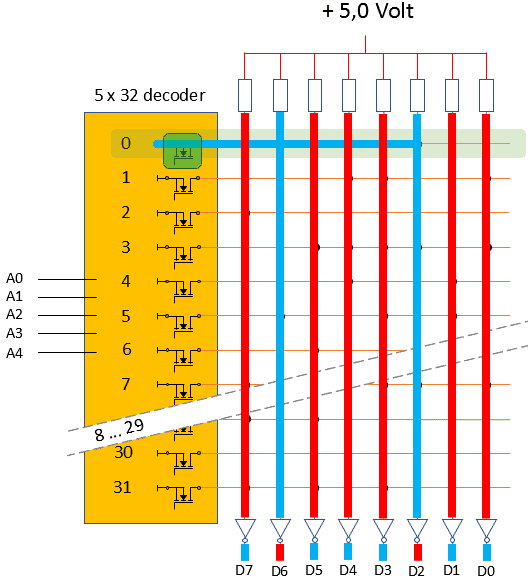
A continuación se muestran cuatro ejemplos de lectura de la ROM.




Páginas relacionadas: