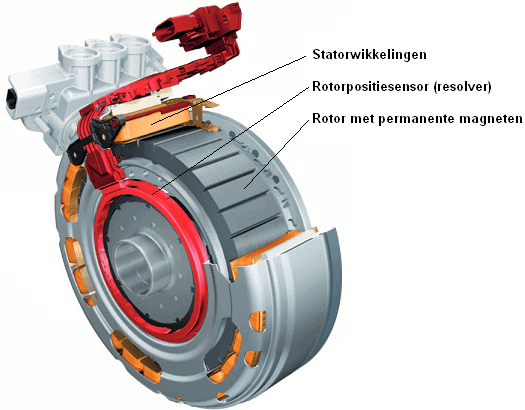
Introducción: Para el funcionamiento del motor eléctrico sincrónico Es esencial que el lavado correcto a través del inversor están controlados. Para determinar qué bobina (U, V o W) debe energizarse, la ECU del inversor lee la posición del rotor, que es medida por el sensor de posición del rotor, también llamado "resolver".
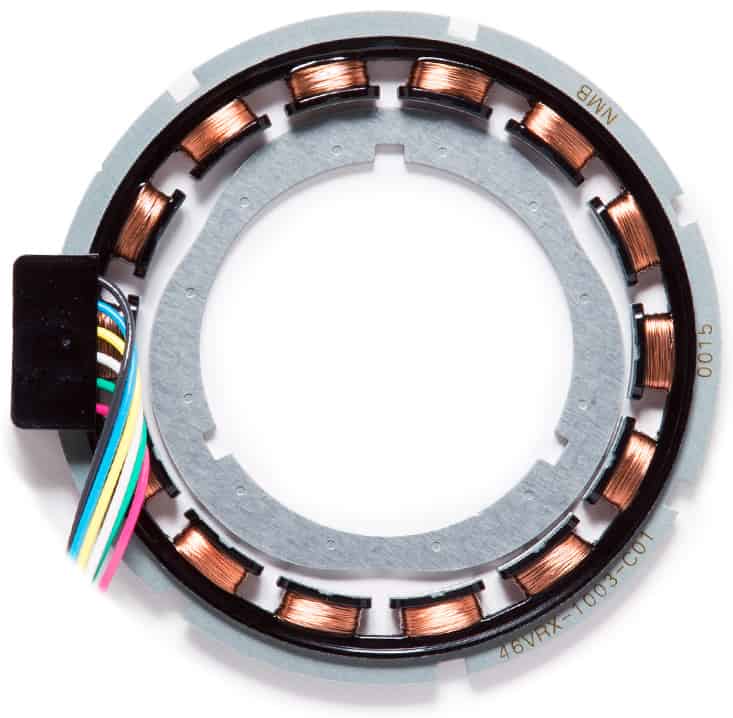
El resolutor consta de un anillo exterior con varias bobinas en el interior de una placa excéntrica giratoria. La distancia entre la placa excéntrica y las bobinas cambia constantemente a medida que gira.
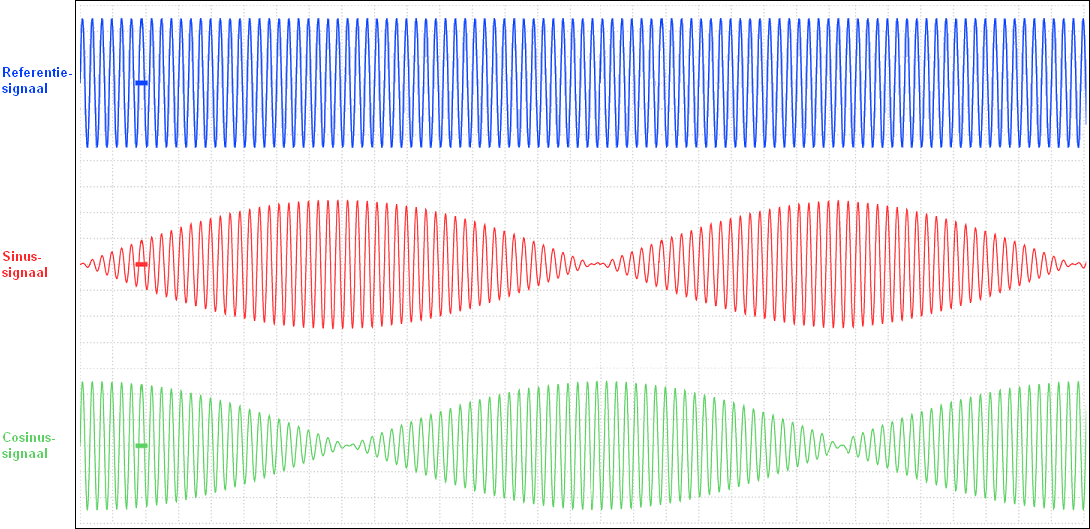
Señales del resolutor: La ECU proporciona al resolutor una señal de referencia. El entrehierro entre una bobina y la excéntrica crea una tensión alterna sinusoidal alta o baja. Con una amplitud alta en la señal sinusoidal roja o verde (ver la figura a continuación), el espacio de aire entre la excéntrica y la bobina es pequeño.
El resolver funciona tanto en reposo como con el motor eléctrico en marcha: en ambos casos la ECU debe saber en qué posición se encuentra el rotor. La siguiente imagen muestra las señales teóricas. En realidad, la frecuencia es mucho mayor, por lo que la variación en la amplitud de las señales seno y coseno es claramente visible.
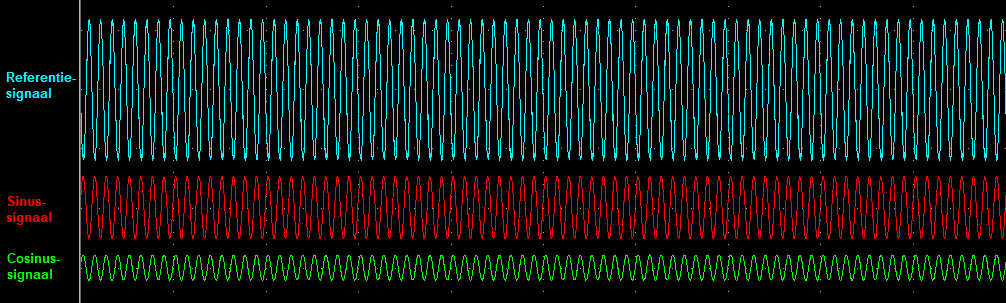
Las dos imágenes siguientes muestran una medición real en un resolver. Aquí también vemos la señal de referencia en la parte superior y las señales del seno y el coseno debajo. La primera imagen está parada: el motor eléctrico no funciona. La altura de la señal seno y la señal coseno permanece constante. Según el nivel de este voltaje alterno, la ECU sabe dónde está el rotor cuando está parado.
Señales de resolución en reposo
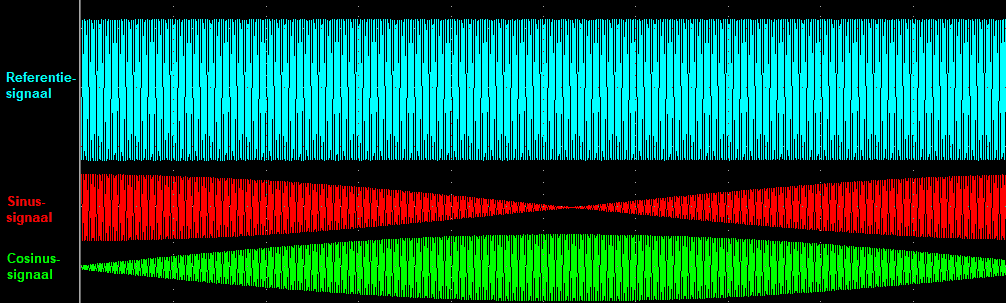
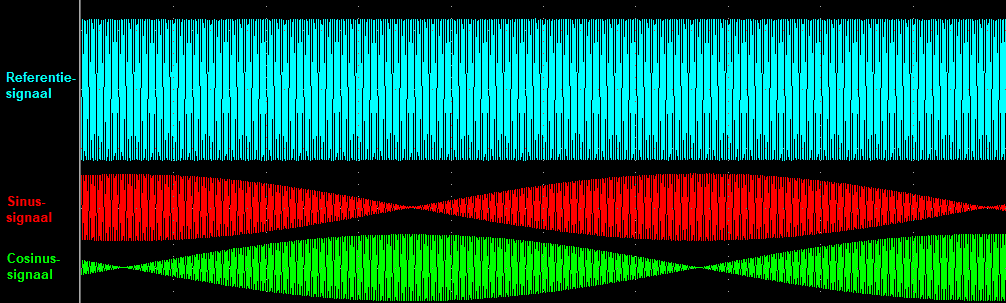
En las dos imágenes siguientes se ha reducido el tiempo por división. La frecuencia de la señal de referencia en el resolver no cambia, pero se mide durante un período de tiempo mayor en la medición. Como resultado, vemos que las amplitudes de las señales seno y coseno cambian claramente. La primera imagen se midió a baja velocidad del rotor y la segunda a mayor velocidad. A medida que aumenta la velocidad, aumenta la frecuencia de las señales seno y coseno (más señales por unidad de tiempo), pero la amplitud (el nivel del voltaje alterno) permanece constante.
Señales de resolución: velocidad baja
Señales de resolución: velocidad aumentada
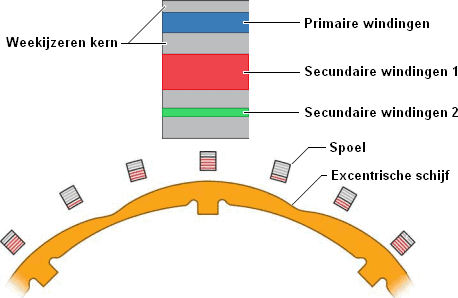
Componentes del solucionador: El resolver del VW E-Golf contiene 30 bobinas conectadas en serie. Cada bobina del resolutor consta de un núcleo de hierro dulce con tres devanados diferentes: primario, secundario 1 y secundario 2.
La bobina primaria (azul) se alimenta con tensión alterna de alta frecuencia.
El número de vueltas secundarias (1 roja, 2 verdes) es diferente en cada bobina.
Cuando la leva de la placa excéntrica se mueve a lo largo de la bobina, se amplifica la inductancia en los devanados secundarios. Debido al número de espiras de los devanados secundarios 1 y 2 en cada bobina, esto también da lugar a diferentes tensiones en los devanados secundarios. La ECU del inversor puede calcular la posición del rotor en función de los voltajes de los devanados secundarios 1 y 2.
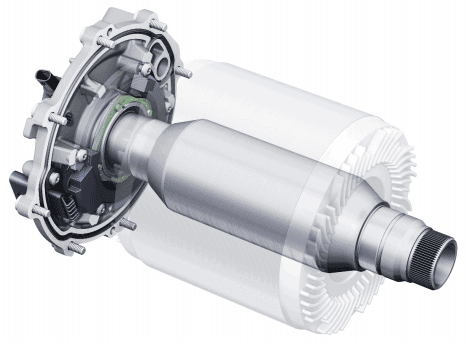
El ajuste del resolver al rotor es muy preciso: muchos fabricantes prescriben que se debe reemplazar todo el motor eléctrico si surgen problemas con el resolver. Después de desmontar (accidentalmente) el resolver o de aflojar los tornillos en el exterior de la carcasa del motor eléctrico, el resolver ya no se puede volver a montar correctamente. También en este caso muchos fabricantes prescriben la sustitución del motor eléctrico.
La posición exacta del rotor de un motor sincrónico debe conocerse en parada y durante la marcha. Si el sensor está defectuoso, el vehículo ya no puede circular.
Van de motor asincrónico por otro lado, no es necesaria ninguna vigilancia de la posición del rotor. El sensor de posición del rotor emite cuatro impulsos por revolución del rotor. Esta medición monitorea la cantidad máxima de deslizamiento entre el campo magnético giratorio entre el estator y el rotor. Como sensor se utiliza a menudo el sensor Hall. El sensor Hall transmite impulsos a la ECU cuando el rotor gira, pero no puede realizar una medición en reposo, a diferencia del resolutor del motor síncrono. En ocasiones, los fabricantes también optan por utilizar el resolver del motor síncrono como sensor de posición del rotor.