Control de procesos basado en las condiciones de operación.
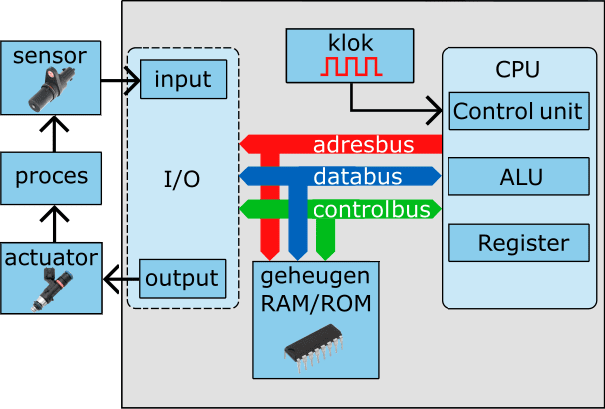
Tecnología de control: La ECU mide, controla y regula los procesos. La ECU recibe información de los sensores. Un sensor convierte un cambio en una cantidad física en una señal eléctrica. La información de este sensor ingresa a la ECU a través de la entrada. Las posibles señales de entrada provienen de:
sensor de velocidad;
sensor de temperatura;
sensor de carga (presión negativa);
Sensor de oxigeno.
La información que llega no necesariamente conduce directamente a una acción. Sólo cuando un valor medido difiere del valor deseado se puede ajustar el control del actuador. La ECU tiene entonces una función de “regulación”. Las decisiones de sí/no se toman mediante el programa informático preprogramado (memoria ROM/Flash).
Control de procesos en una ECU
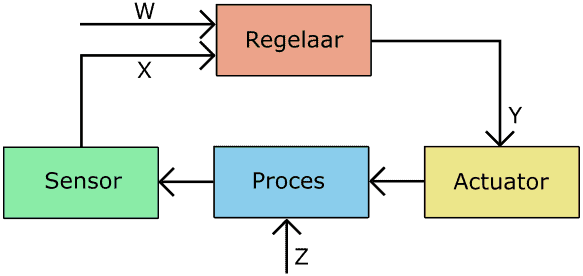
Para medir: el sensor, en este caso un sensor, mide una cantidad física y la convierte en una señal eléctrica. Este valor medido (X) se envía al controlador. El valor medido no tiene por qué conducir directamente a una acción; Piense en una temperatura constante.
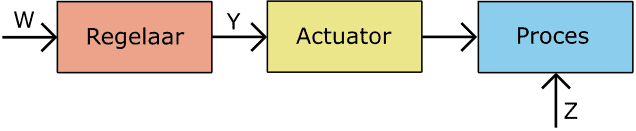
Para conducir: el controlador (ECU) controla un actuador. No hay retroalimentación de un sensor, por lo que la ECU no sigue la secuencia del proceso. Por lo tanto, no siempre se detecta un fallo en el proceso. Un ejemplo de control es operar manualmente la bocina (W); la ECU controla la bocina (Y) cuando se acciona el interruptor. No hay función de control en la bocina, por lo que las fallas (Z) no se reconocen.
Para organizar: el controlador puede procesar un comando manual (W) o un valor medido del sensor (X) en un control de actuador. El actuador provoca un cambio en el proceso; considere, por ejemplo, la duración de la inyección. Inyectar más significa una mezcla más rica. El contenido de oxígeno se mide mediante la sonda lambda y transmite este valor medido (X) al controlador. Cuando se presenta una falla imprevista (por ejemplo, un bloqueo en un inyector), esto provoca un cambio (Z) en el proceso. Esta desviación también la mide el sensor, de modo que el controlador puede ajustar el proceso mediante el control del actuador.
Control de procesos en función de las condiciones de operación: El sistema de gestión del motor de un motor de combustión debe quemar la mezcla de forma óptima en todas las condiciones de funcionamiento. La determinación de la composición de la mezcla y el momento del encendido son cruciales para garantizar la composición de los gases de escape (emisiones), la economía y lograr la potencia deseada.
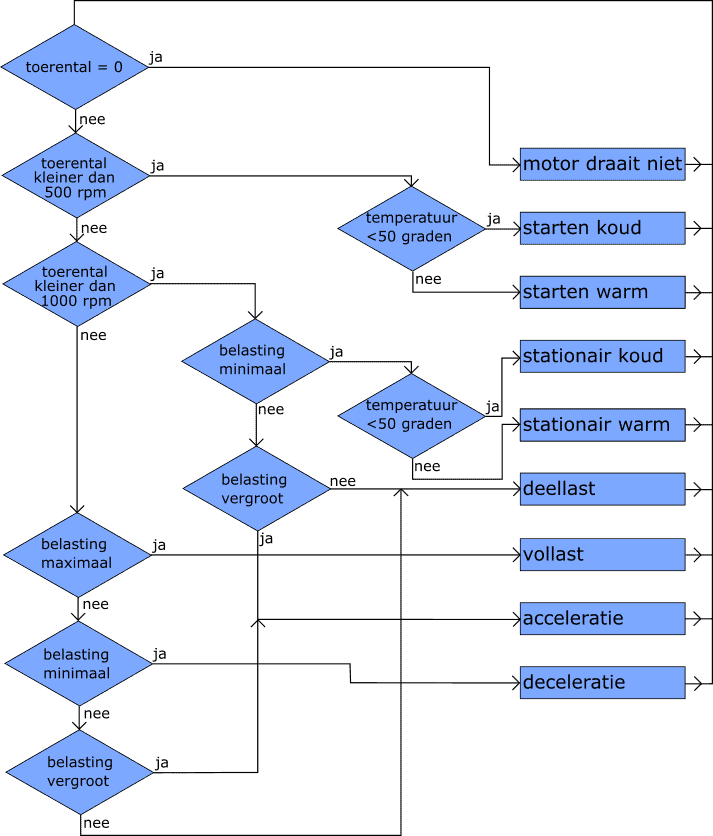
Cada condición de funcionamiento tiene su propia tecnología de control:
Arranque en frío: la mezcla es rica y el encendido se retrasa;
Arranque en caliente: la mezcla es menos rica que durante el arranque en frío;
Ralentí en frío: la mezcla es rica y se aumenta la velocidad de ralentí;
Ralentí en caliente: la mezcla es menos rica a una velocidad de ralentí más baja;
Carga parcial: mezcla estequiométrica, rango de revoluciones entre 1500 y 4000 rpm, sincronización del encendido predefinida, control lambda activo;
Carga completa: la mezcla se enriquece, la carga y la velocidad son altas;