Asignaturas:
- Asistencia general de aparcamiento
- Control de distancia de estacionamiento
- Cámara de marcha atrás
- Vista lateral
- Vista envolvente
- Asistencia de aparcamiento
Asistencia general de aparcamiento:
La asistencia al estacionamiento incluye sistemas que ayudan al conductor a entrar y salir del estacionamiento. El sistema de asistencia al aparcamiento más conocido es el “control de distancia de aparcamiento”, abreviado como PDC. Este sistema informa al conductor del vehículo sobre la distancia hasta el vehículo que se encuentra detrás o, en el caso de sistemas extensos, también hasta la parte delantera del vehículo. Esta página describe tecnologías modernas que son una extensión del control de distancia de estacionamiento o un sistema de asistencia completamente independiente.
Control de distancia de estacionamiento:
El control de distancia de estacionamiento (PDC) es un sistema de advertencia de distancia que mide las señales al entrar y salir de espacios de estacionamiento y proporciona información sobre la distancia hasta el obstáculo. Hay sensores ultrasónicos en el parachoques trasero y, a menudo, también en el parachoques delantero (ver imagen). Estos emiten ondas sonoras de altísima frecuencia que son imperceptibles para el oído humano. Estas frecuencias ultrasónicas se reflejan en los objetos cercanos y son recibidas por el sensor. El sensor mide el tiempo entre el envío y la recepción de estas señales. Cuanto más cerca esté el objeto, más rápido rebota la señal. El sensor lo capta y lo transmite a la unidad de control PDC (ordenador).
Este ordenador puede transmitirlo al conductor en señales de audio y tanto con señales de imagen como de sonido. A continuación se escucha un pitido, que se vuelve cada vez más rápido a medida que el objeto se acerca. A una distancia de aproximadamente 30 cm emite un pitido constante, que te indica como conductor que tienes que parar.

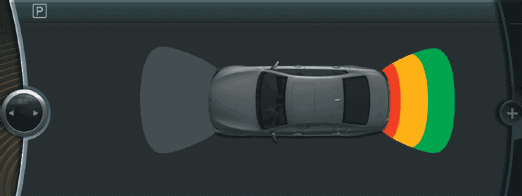
Los ordenadores de a bordo modernos suelen estar equipados con una opción en la que se muestra en una pantalla la distancia hasta el objeto. Los sensores PDC son los mismos; la unidad de control calcula los datos de los sensores y los procesa en información que la pantalla puede mostrar.
La siguiente imagen muestra la unidad de control del PDC (ECU). Este cuadrado gris contiene el microcontrolador, el amplificador y una puerta AND. El microcontrolador transmite un voltaje de onda cuadrada con una frecuencia de aproximadamente 40 kHz (negro). Periódicamente también se emite una tensión de bloqueo de baja frecuencia (rojo/azul). La puerta AND recibe los dos voltajes de bloque. Cuando ambos voltajes son altos, el voltaje de salida (a la derecha de la puerta AND) es alto. Cuando uno de los dos voltajes es bajo, la salida también es baja. El voltaje de salida se envía de regreso al microcontrolador y al transmisor en el sensor PDC. El transmisor emite la señal ultrasónica a una velocidad de aproximadamente 300 m/s. Cuando un objeto está cerca, el sonido ultrasónico se refleja y es registrado por el receptor. A esto lo llamamos “triangulación”. El receptor envía la señal del bloque formado a la ECU. La señal del bloque se amplifica mediante un amplificador y luego el microcontrolador la procesa.
El tiempo entre la recepción de la señal de salida de la puerta AND y el amplificador es una medida de la distancia al objeto. Cuanto menor sea la distancia entre el sensor PDC y el objeto, menor será el tiempo. El microcontrolador controla el zumbador o se comunica con otras unidades de control a través del bus CAN.
El siguiente diagrama de circuito (VAG) muestra la comunicación entre las unidades de control, las entradas a los interruptores y las salidas al zumbador, entre otras cosas.
La unidad de control PDC (J446) recibe la velocidad de conducción y la señal de marcha atrás a través del bus CAN. La unidad de control PDC envía una tensión de bloque modulada a través de la conexión T12/11 al empalme de cables (X86 en el parachoques trasero) que está conectado a todos los sensores PDC (G203, G334, G335 y G206). Cada sensor PDC tiene su propio cable de señal (a través del pin 2) a la ECU. Además, la tierra de cada sensor está conectada a una soldadura de tierra (352).
Cuando uno o más sensores detectan un objeto, la unidad de control activa el zumbador (H15). Dependiendo de la distancia al objeto, el zumbador emite una señal sonora intermitente más rápida o más lenta.

Gracias a la comunicación con la interfaz de diagnóstico (J533), es posible realizar las siguientes funciones de diagnóstico:
- consultar memoria de fallos
- Ajustar la codificación de la unidad de control (por ejemplo, después de ampliar el sistema con sensores PDC en la parte delantera o después de instalar una barra de remolque).
- ajustar el volumen del timbre
- Consulte bloques de valores medidos como, por ejemplo, la distancia de todos los sensores al objeto, la distancia calculada y el tiempo de estabilización del transmisor y del receptor.
Cámara de marcha atrás:
Además del control de distancia de aparcamiento, la asistencia al aparcamiento también puede equiparse con una cámara de marcha atrás. En el momento en que el conductor pone la marcha atrás o pulsa un botón en el interior, se activa la cámara situada en la parte trasera del vehículo. Normalmente la imagen se muestra en la pantalla de la radio o del ordenador de a bordo.
La siguiente imagen muestra una pantalla de BMW con la imagen en la parte trasera del vehículo. A la derecha de la imagen de la cámara se encuentra un vehículo con una parrilla de tres partes delante y detrás; Esto muestra la distancia a un objeto que registran los sensores PDC.
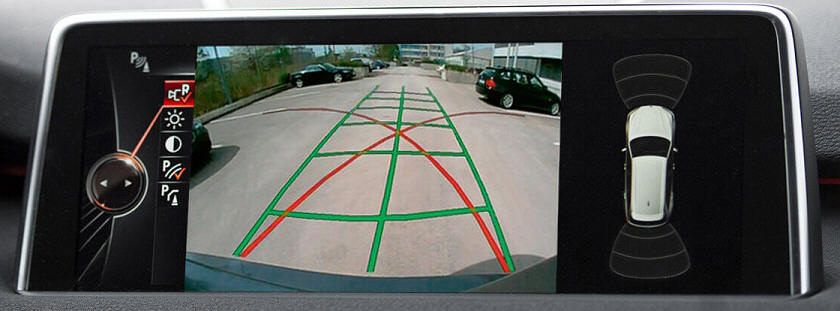
En la imagen de la cámara de marcha atrás se pueden ver líneas rojas y verdes. Las líneas rojas muestran la posible dirección en la que se puede girar el vehículo; Con la dirección máxima, las ruedas seguirán la línea roja en el exterior de la curva. La cuadrícula verde sigue la dirección en la que se gira el manillar; en este momento las ruedas delanteras están rectas. Cuando el conductor gira el volante, las líneas verdes indican las líneas de conducción reales. El sensor del ángulo de dirección registra la posición del volante.
La cámara de marcha atrás a veces está a la vista y suele estar situada cerca de la matrícula y/o de la manija para abrir el portón trasero. A veces los fabricantes optan por montar la cámara fuera de la vista. La siguiente imagen muestra la cámara de marcha atrás de un VW Golf, con un motor eléctrico que inclina el emblema de VW para mover la cámara hacia afuera. El emblema se pliega automáticamente hacia atrás cuando vuelves a avanzar. No sólo la cámara se coloca fuera de la vista, sino que la lente también se ensucia menos rápidamente.

Vista lateral:
Cuando retrocedes entre dos vehículos u objetos grandes, debes avanzar un poco hacia adelante para mirar a izquierda y derecha. Esto es mucho más fácil con una cámara de visión lateral (también llamada vista de esquina); Las cámaras situadas a la izquierda y a la derecha del parachoques delantero envían la imagen a la pantalla del salpicadero. La imagen muestra la imagen de las cámaras de las esquinas. Desafortunadamente, las cámaras no se pueden montar de forma invisible. Los automóviles equipados con una cámara de visión lateral tienen (a menudo) una lente negra en el parachoques. La siguiente imagen muestra el parachoques delantero de un BMW con la cámara izquierda.


Vista envolvente:
Los sistemas de asistencia al aparcamiento más lujosos incluyen sin duda la “vista envolvente”, también conocida como vista superior, 3D o vista de pájaro. Cada marca da su propio nombre y característica al sistema. Ahora usamos el nombre vista envolvente.
Con vista envolvente, la parte superior del automóvil se muestra en la pantalla. Parece que hay una cámara mirando el techo del coche y el área a su alrededor. El coche es una simulación y el entorno se graba mediante varias cámaras (normalmente cuatro) compuestas.
Las siguientes tres imágenes (de BMW) muestran la imagen que ve el conductor. Al aparcar, la separación entre la plaza de aparcamiento y objetos como postes, etc. es claramente visible. Al dar marcha atrás, puede hacer zoom en la parte trasera; Aquí se pueden ver principalmente plantas. Los sensores PDC convencionales registran la distancia a las plantas. El ordenador marca esta distancia con un color rojo.

Al aparcar delante, el sistema también puede mostrar el entorno y el frente. Los sensores PDC ahora también ayudan a determinar la distancia hasta la valla.

El estacionamiento en paralelo junto a una acera puede, si el conductor no tiene cuidado, dañar los neumáticos y las llantas. La vista envolvente ahora también ofrece una solución; Gracias a la buena visión general de la calle, se puede aparcar en línea recta y cerca de la acera. Los últimos avances de BMW permiten invertir la imagen de la cámara y simular el vehículo.

Las siguientes tres imágenes muestran los lugares donde suelen ubicarse las cámaras.



Asistencia de aparcamiento:
Como ampliación de la asistencia al aparcamiento, la llamada “asistencia para salir del aparcamiento” puede ayudar al conductor a abandonar una plaza de aparcamiento marcha atrás con visibilidad limitada. Esto podría ocurrir en situaciones en las que el vehículo está estacionado junto a una pared o entre vehículos.
Los sensores situados en la parte trasera del vehículo detectan el tráfico que pasa por detrás del vehículo y que puede suponer un riesgo de colisión. Esto incluye todos los objetos en movimiento que se acercan al vehículo a una determinada velocidad. Cuando el sistema de asistencia de estacionamiento detecta un vehículo que se acerca, aparece un mensaje en la pantalla del sistema de infoentretenimiento. A esto se le suele añadir una señal acústica. Si el conductor ignora estas señales y conduce hacia atrás, el sistema interviene físicamente accionando los frenos para reducir la velocidad del vehículo.
