Asignaturas:
- Introducción
- Motor eléctrico AC (síncrono, con imanes permanentes)
- Control de CA del motor síncrono.
- Motor eléctrico de CA (motor asíncrono de jaula de ardilla)
- Mapa de eficiencia del motor eléctrico síncrono y asíncrono.
Introducción:
Se utiliza un motor eléctrico para impulsar un vehículo híbrido o totalmente eléctrico. El motor eléctrico convierte la energía eléctrica (de la batería o del extensor de autonomía) en movimiento para impulsar las ruedas. Además, el motor eléctrico también puede convertir la energía cinética en energía eléctrica al frenar el motor: frenado regenerativo. En ese caso, el motor eléctrico funciona como una dinamo. Debido a estas dos funciones, también llamamos al motor eléctrico “máquina eléctrica”.
Las opciones para colocar el motor eléctrico en un vehículo híbrido son:
- En el motor de combustión, donde la transmisión se realiza mediante correas múltiples o directamente mediante el cigüeñal;
- Entre el motor y la caja de cambios: el eje de entrada de la caja de cambios es accionado por el motor eléctrico;
- Integrado en la caja de cambios;
- Sobre el diferencial;
- En los cubos de las ruedas (motor de cubo).
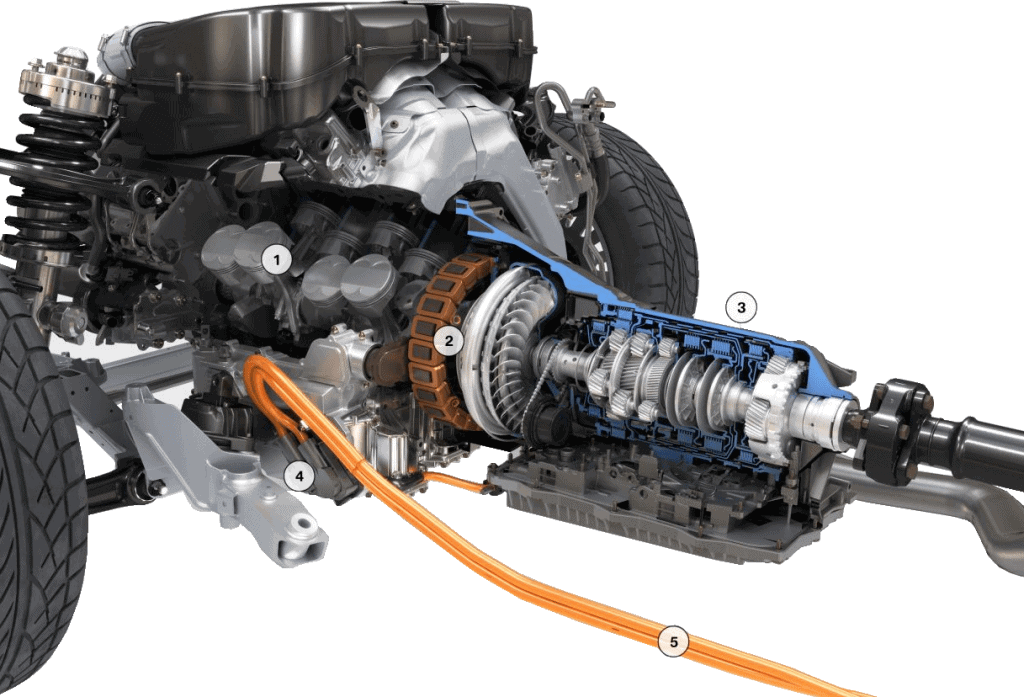
El motor eléctrico de un coche totalmente eléctrico suele estar montado en el eje trasero. La siguiente imagen muestra el motor eléctrico con el inversor en una carcasa cilíndrica y el mando final de un Tesla.

Motor eléctrico AC (síncrono, con imanes permanentes):
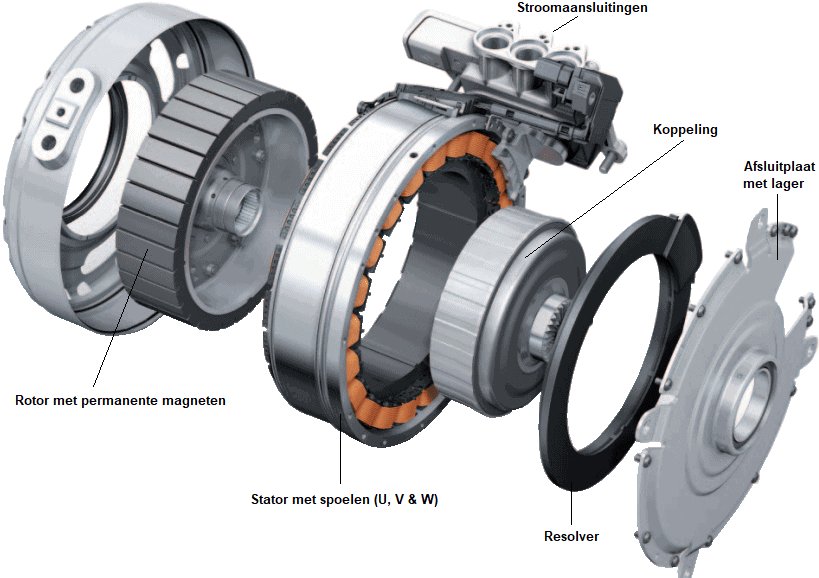
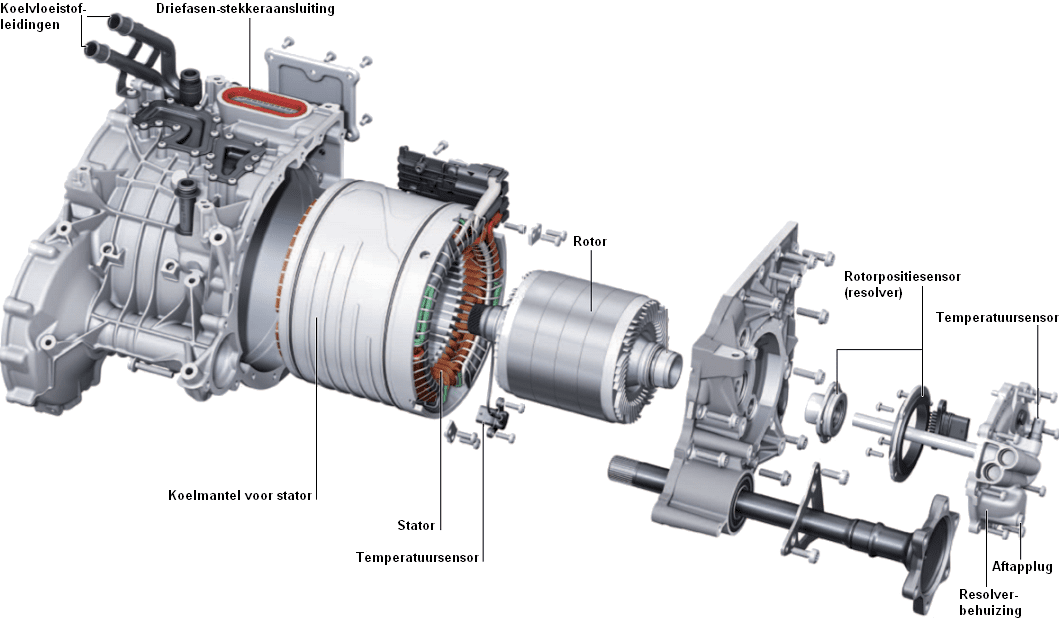
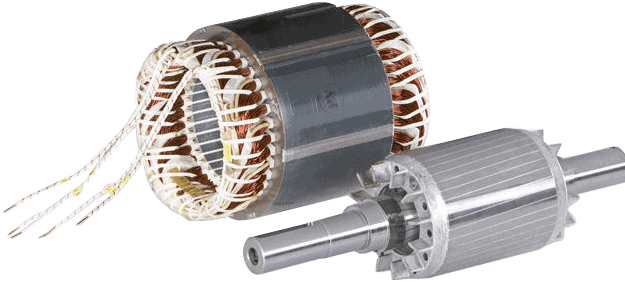
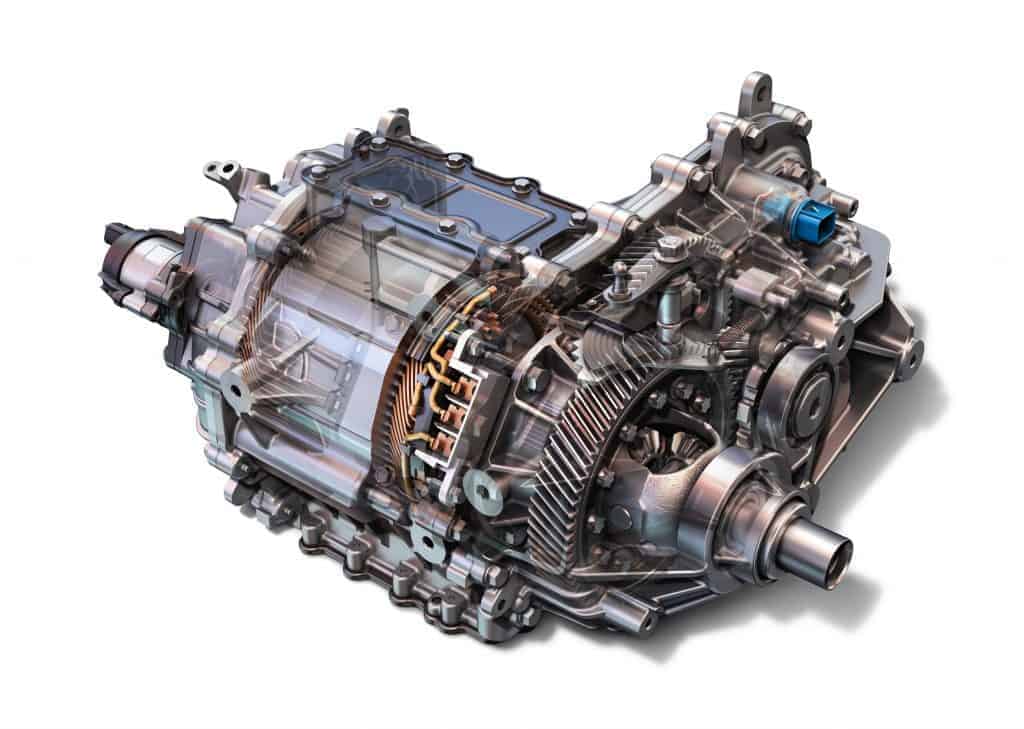
La siguiente imagen muestra las partes de un motor eléctrico (sincrónico) de Audi. Este tipo se utiliza en las variantes híbridas del A6 y A8. Enumeraremos brevemente los componentes. Estos componentes se describen detalladamente en los siguientes párrafos.
El rotor con imanes permanentes comenzará a girar como resultado de un cambio en el campo magnético en el estator. El rotor está conectado al embrague, que puede conectar o desconectar el motor de combustión y el motor eléctrico (junto con un embrague (no mostrado)) en diferentes condiciones de funcionamiento. La posición del rotor está determinada por la resolutor medido: este dato es importante para que los controladores IGBT controlen las bobinas del estator en el momento adecuado.
El motor eléctrico con imanes permanentes puede ser controlado tanto por CC (tensión continua) como por CA (tensión alterna).
El motor síncrono es uno de los motores eléctricos más utilizados en vehículos híbridos o totalmente eléctricos. Este tipo de motor eléctrico consta de un estator con devanados y un rotor con varios imanes permanentes. El rotor gira a la misma velocidad que el campo magnético del estator. El motor síncrono se puede controlar de la siguiente manera:
- AC: controlado por una señal sinusoidal (corriente alterna).
- DC: controlado con señal cuadrada o trapezoidal (corriente continua)
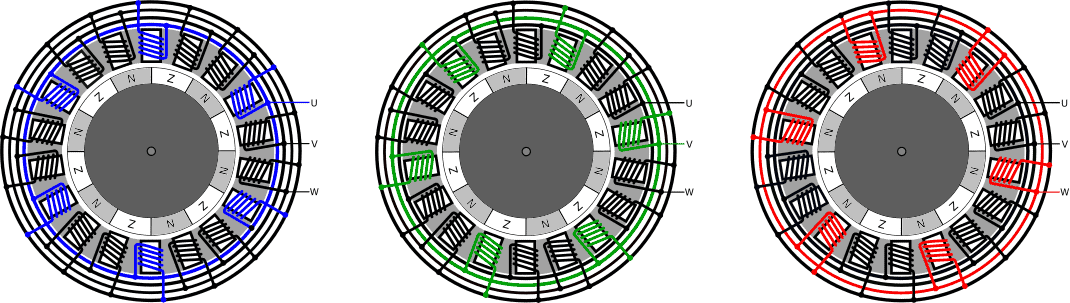
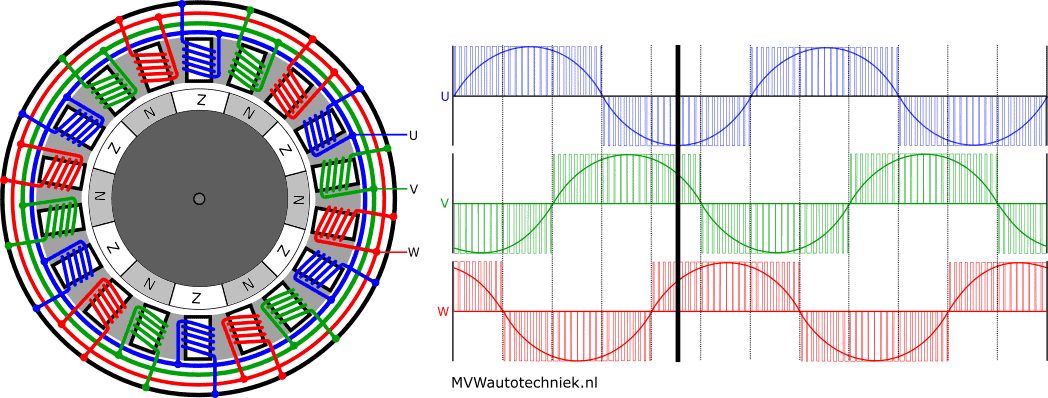
El estator del motor síncrono está formado por tres grupos de bobinas de estator: U, V y W. Cada grupo contiene tres juegos de seis bobinas conectadas en paralelo que se distribuyen por toda la circunferencia del estator. Una de cada tres bobinas pertenece a la misma serie.
- Bobinas en U: azul
- Bobinas en V: verde
- Bobinas W: rojo
El rotor contiene varios imanes permanentes. Al energizar alternativamente las bobinas del estator, se crea un campo magnético giratorio. El rotor sigue el campo giratorio y por tanto gira.
Control AC del motor síncrono:
El control de CA utiliza control controlado por frecuencia o conmutación sinusoidal. Las bobinas del estator se alimentan con un voltaje de onda sinusoidal trifásica alterna para hacer girar el rotor.
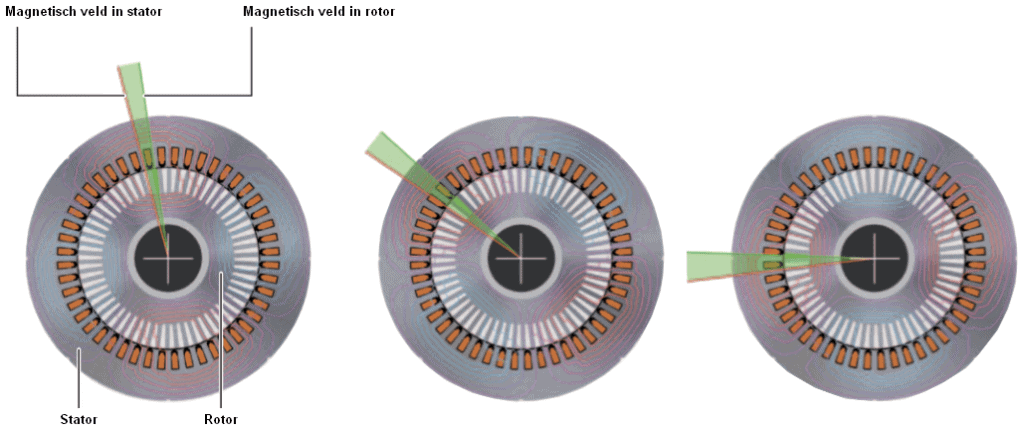
La siguiente imagen muestra la posición del rotor con una bobina en U excitada al máximo. Como resultado del campo magnético, los polos norte se han posicionado directamente frente a las bobinas en U energizadas. El cursor en el gráfico al lado del motor eléctrico indica el control de las bobinas en ese momento.
Para su información: el rotor en la explicación gira al controlar las bobinas del estator agujas del reloj.
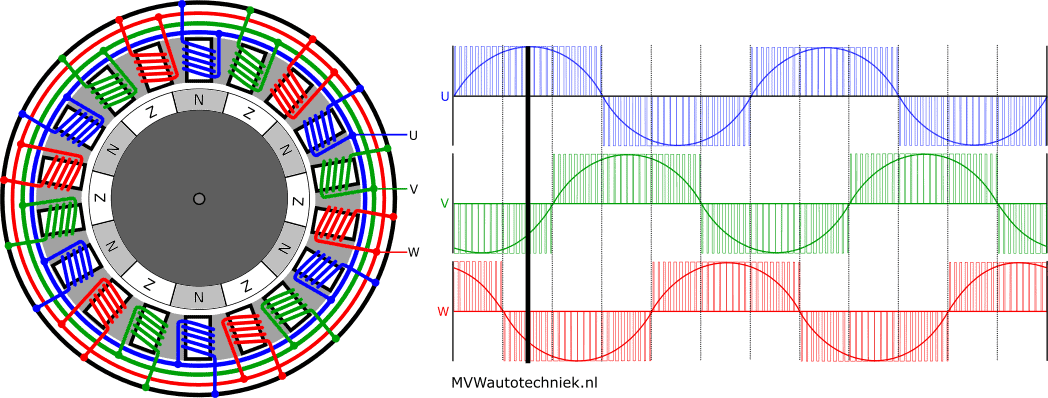
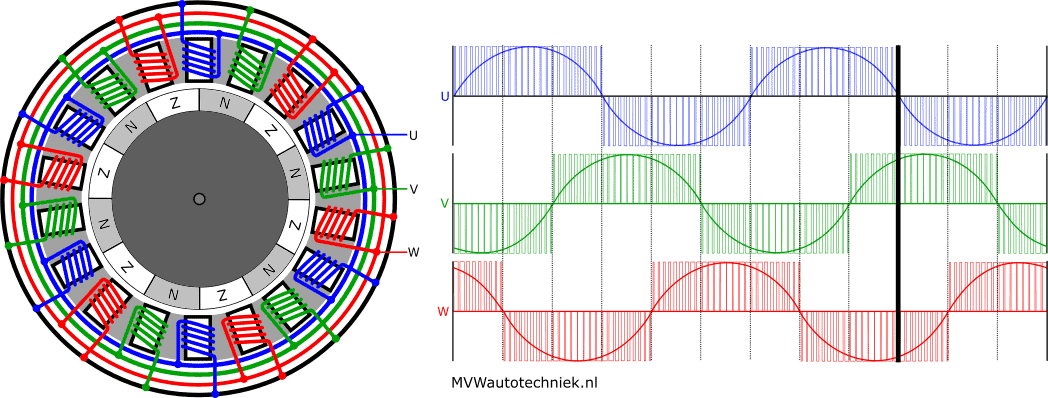
En la siguiente imagen, la onda sinusoidal, es decir, la corriente alterna que pasa por la bobina en U, es máximamente negativa. Durante este control, los polos sur del rotor están directamente opuestos a las bobinas del estator energizadas (U).
En realidad, existe un pequeño espacio de aire entre los polos norte y sur del rotor. Durante el cambio del polo sur al polo norte, cambia la dirección actual en la bobina en U. Más:
- La corriente que pasa por la bobina en V (verde) es casi máximamente positiva; el polo norte también está casi opuesto a la bobina.
- La corriente a través de la bobina W ha sido máximamente negativa y está aumentando. El polo sur ha girado más allá de la bobina.
Para dar una idea de cómo fluye la corriente, la siguiente animación muestra la rotación del rotor debido a la corriente alterna.
Motor eléctrico de CA (motor asíncrono de jaula de ardilla):
El motor eléctrico de jaula de ardilla o de armadura de cortocircuito es un motor asíncrono. La diferencia entre el motor síncrono de imanes permanentes y el motor asíncrono está en el rotor: se trata de un tambor de hierro dulce con conductores en dirección longitudinal. El rotor funciona de forma asíncrona con el estator, lo que significa que existe una diferencia de velocidad entre el rotor y la velocidad magnética del estator. El estator es exactamente el mismo.
El rotor del motor eléctrico asíncrono consta de bobinas en cortocircuito; las bobinas U, V y W están conectadas entre sí por un lado. Cuando el rotor está en el campo giratorio del estator, se crea un voltaje de inducción en las bobinas del rotor. Debido a que las bobinas del rotor están en cortocircuito entre sí, a través de ellas fluye una corriente. Esta corriente hace que el rotor genere un campo magnético, creando un par. Debido a que el funcionamiento del motor eléctrico asíncrono se basa en la ley de inducción, también lo llamamos motor de inducción.
El par entregado afecta el deslizamiento entre el campo magnético giratorio del estator y la velocidad del rotor.
El motor asíncrono tiene una serie de ventajas y desventajas en comparación con el motor síncrono.
Beneficios:
- rotor relativamente simple, robusto y económico;
- alto par a baja velocidad.
Contras:
- menor densidad de potencia (por masa) y eficiencia (eficiencia). Las corrientes en las bobinas del rotor en cortocircuito provocan pérdidas adicionales en el rotor;
- La velocidad no se puede controlar con precisión porque depende de la carga. Esto en sí mismo no tiene por qué ser una desventaja: con un buen sistema de control también se puede ajustar la velocidad del motor asíncrono;
- Alta corriente de arranque.
La posición del rotor y la velocidad del motor asíncrono se miden mediante un sensor de posición del rotor. Los sensores Hall suelen proporcionar al menos cuatro pulsos por revolución del rotor para transmitir la posición y la velocidad del rotor. A este tipo de sensor de posición del rotor no lo llamamos resolutor, como ocurre con el motor síncrono.
A diferencia del motor síncrono, el sensor de posición del rotor no es necesario para conocer la posición del rotor en reposo. La posición del rotor es importante durante la rotación: se debe tener cuidado para garantizar que el deslizamiento entre el campo giratorio magnético y el rotor no sea demasiado grande. Cuando el campo giratorio se mueve demasiado rápido, puede surgir una situación en la que el rotor de repente quiera girar en la otra dirección. Las fuerzas que surgen pueden ser desastrosas para los componentes mecánicos y eléctricos.
Algunos fabricantes también optan por utilizar un motor asíncrono. resolutor aplicando. El motivo lo desconozco. En cualquier caso, el resolutor es extremadamente preciso tanto en reposo como en funcionamiento, lo que puede favorecer un control preciso.
Mapa de eficiencia del motor eléctrico síncrono y asíncrono:
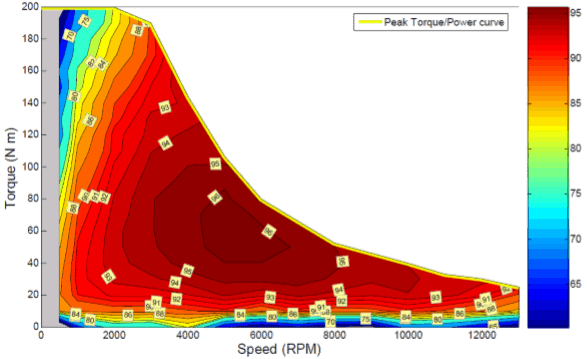
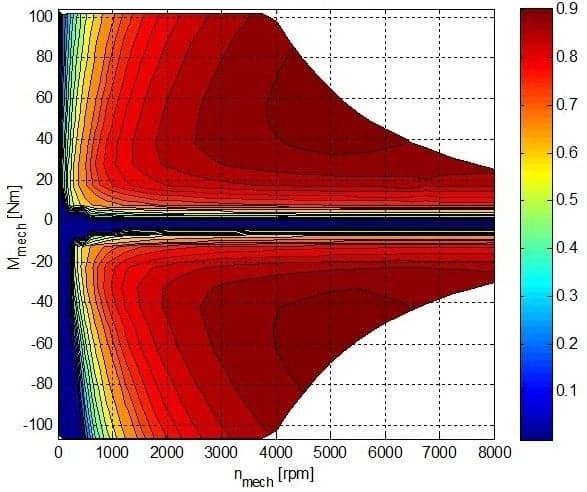
Las siguientes imágenes muestran la eficiencia del motor eléctrico síncrono (izquierda) y del motor eléctrico asíncrono (derecha).
- El motor eléctrico síncrono es muy eficiente. La eficiencia está por encima del 90% en un área grande, con valores máximos de hasta el 96%. A partir de 2000 rpm se produce un debilitamiento del campo, lo que provoca una disminución del par máximo.
- El motor asíncrono tiene una eficiencia significativamente menor que el motor síncrono a velocidades más bajas.
Páginas relacionadas: