emner:
- Frihedsgrader i hjulføringen
- Hængsler i hjulføringen
- Styringer i hjulføringen
- Beregn frihedsgrader
Frihedsgrader i hjulføringen:
Affjedringen på en bil indeholder en række hængsler (bl.a. på bærearme og støddæmper), der giver frihedsgrader i hele affjedringen. Hjulføringen sikrer, at de mulige frihedsgrader af de mulige hjulbevægelser er begrænset til kun en eller to. Hvis et hjul ikke holdes "fast", vil det frit kunne rotere, vippe (i x- og y-retninger), dreje, bevæge sig op og ned. Hjulet er så i princippet "løst" fra affjedringen. Den kan bevæge sig i enhver retning uden "vejledning". Hver netop nævnte bevægelse er én grad af frihed.
Hjulophænget, altså hjulføringen, sikrer, at bevægelsesfriheden er begrænset til 1 frihedsgrad. Det betyder, at hjulet kun kan bevæge sig "frit" i 1 retning uden påvirkning fra føreren. Den frie bevægelse er op-og-ned-bevægelsen af kompression og rebound. Hjulet kan hoppe ind og ud uhindret over en ujævn vejbelægning.
En bils hjulophæng er konstrueret med en række liniehængsler, kugleled og roterende glidende hængsler. Disse hængsler påvirker alle hinanden. Et for mange hængsler skaber for mange frihedsgrader (så hjulet kan utilsigtet bevæge sig i forskellige retninger) eller 0 frihedsgrader (hjulet kan ikke bevæge sig og kan derfor ikke komprimeres og komprimeres).
Hængsler i hjulføringen:
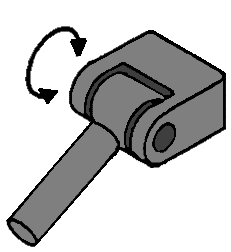
Linjehængsel:
Dette linjehængsel kan bevæge sig i 1 retning; op og ned. Dette giver 1 grad af frihed.
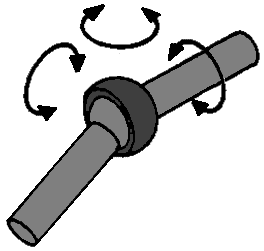
Kugleled:
Med dette hængsel kan de relevante dele foretage 3 bevægelser i forhold til hinanden; en nikkende, rullende og drejende bevægelse. Dette hængsel har 3 frihedsgrader, for når hængslet er “løst”, kan det lave 3 frie bevægelser (se pile).
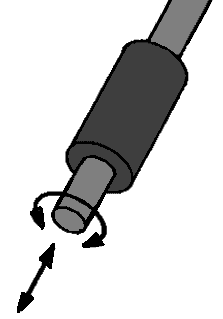
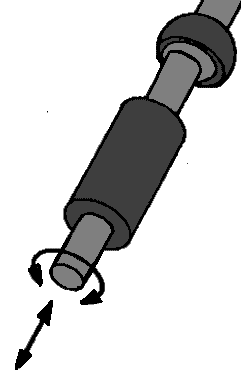
Drejeligt glidende hængsel:
Dette hængsel kan lave 2 bevægelser; en roterende og en ind og ud glidende bevægelse. I princippet er dette et eksempel på en støddæmper (fra en McPherson fjederben). Disse 2 bevægelser sikrer, at det roterende glidende hængsel har 2 frihedsgrader.
Guider i hjulguiden:
For at skabe et hjulophæng af forskellige typer hængsler, skal hængsler nogle gange kombineres på 1 objekt, fx et bærearm. Vi kalder så denne støttearm for en guide. Nedenfor er et par eksempler på disse ledere:
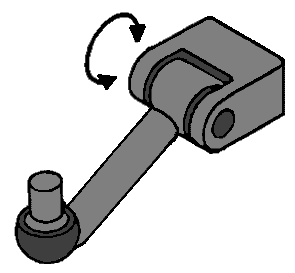
Linjehængsel med kugleled:
Dette er et typisk eksempel på et bærearm, som er forbundet med karosseriet (eller underrammen) på linehængselsiden og forbundet med styreleddet på kugleledssiden. Når hele dette hængsel er løst, kan det både bevæge sig i linjehængslets bevægelsesretning (1 retning) og kugleleddets 3 retninger. Linjehængslet har jo 1 frihedsgrad og kugleleddet har 3. Fordi denne del ses som 1 leder, kan frihedsgrader lægges sammen. 1'eren og 3'eren gør det så til 4 frihedsgrader.
Dobbelt kugleled:
Et eksempel på en guide med dobbelt kugleled er trækstangen med de indre og ydre trækstangskugler. Hvert kugleled har 3 frihedsgrader, så da det er 1 leder bør disse lægges sammen. De har dog samme selvrotation, for laver 1 kugleled en roterende bevægelse, så gør det andet også. Så 1 frihedsgrad af selvrotationen tæller ikke (se de røde pile). Frihedsgraderne for denne leder er 6 i alt, men i den efterfølgende beregning indtastes tallet 1 under "selvrotationer r". Denne 1 trækkes så fra i beregningen.
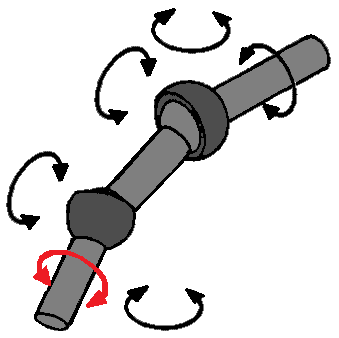
Drejeligt glidende hængsel med kugleled:
Som tidligere nævnt er en støddæmper et roterende glidende hængsel. Hvert McPherson-stiver har dog også et kugleled over sig, selvom du ikke ville tro det i starten. Der er endnu en gummi øverst på støddæmperen. Dette gummi giver en vis bevægelsesfrihed for støddæmperen og har derfor også kugleleds egenskaber. En støddæmper har derfor både de 2 frihedsgrader for det drejeglidende hængsel og de 3 frihedsgrader af kugleleddet, hvilket tilsammen udgør 5. Også her er der en naturlig rotation, fordi rotationsbevægelsen af det roterende glidende hængsel er den samme bevægelse som kugleleddets rotationsbevægelse. Så 1 skal tilføjes til "r" for selvrotation.
Beregn frihedsgrader:
Antallet af frihedsgrader kan beregnes ud fra suspensionsdataene. For at fuldføre formlen korrekt skal hængslerne og guiderne opdeles i kategorier:
- L for antallet af ledere
- g for antallet af samlinger og hængsler
- r for antallet af naturlige rotationer (som med det dobbelte kugleled i 1 guide)
Hertil kommer bogstaverne:
- k for antallet af hjulholdere (i de fleste tilfælde 1, fordi dette er styrestangen)
- εfi for antallet af frihedsgrader for det samlede antal led og hængsler lagt sammen.
F = 6 (k + L – g) -r + εfi
Eksempel:
Et hjulophæng indeholder: k 1 hjulholder (kno), L 2 føringer, g 5 led, r 2 selvdrejninger, εfi 15 samlede frihedsgrader
I formelform er dette:
F = 6 (1 + 2 – 5) – 2 + 15
F = 6 x (-2) – 2 + 15
F = 1
Så nu er der 1 frihedsgrad, så det her er godt. Hjulet kan lave en ren op og ned bevægelse.
For at tydeliggøre dette er her et eksempel med et billede af et hjulophæng:
Billedet nedenfor er af en McPherson-stiver med den tilsvarende legende. Bogstaverne A, B og C repræsenterer guiderne, og tallene 1 til 6 repræsenterer hængslerne/samlingerne.
εfi er hængslernes frihedsgrader lagt sammen; altså 3 frihedsgrader pr. kugleled (altså 4 x 3), 1 frihedsgrad for linehængslet og 2 frihedsgrader for det roterende glidende hængsel.
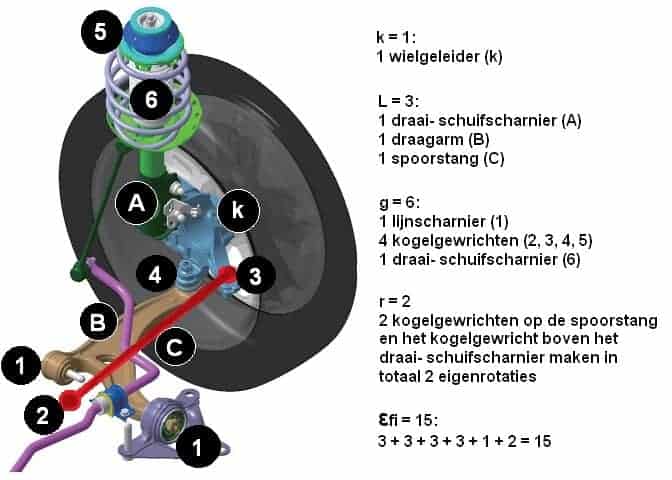
Formlen kan udfyldes med dette:
F = 6 (k + L – g) -r + εfi
F = 6 (1 + 3 – 6) – 2 + 15
F = 6 x (-2) – 2 + 15
F = -12 – 2 + 15
F = -14 + 15
F= 1 frihedsgrad