emner:
- generelt
- Motordele til vinduesvisker
- Tilslut viskermotoren
- Vinduesviskermotor plus koblet
- Fra teori til producentens skema
- To-trins viskermotor
- LIN bus styret viskermotor
overordnet:
Viskermotoren bag er monteret i bilens bagklap. Der er et hul i ruden eller i bagklappens metalplade, hvorigennem viskermotorakslen stikker ud. Viskerarmen med viskerbladet er monteret på denne aksel. Akslen kan åbenbart ikke lave fulde omdrejninger, for så bliver ikke kun bagruden, men også resten af bagklappen eller bagkofangeren tørret ren af vinduesviskerbladet. Derfor er der en mekanisme i motoren, der sikrer, at akslen kan bevæge sig op til 180 grader.

Den bagerste viskermotor har altid én hastighed. Vinduesviskerkontakten kan tændes og slukkes, og der er normalt et interval; Efter tænding vil motoren blive styret med få sekunders mellemrum.
Vinduesviskeren vender altid tilbage til udgangspositionen, når den er slukket. Hvis dette ikke skulle ske, ville viskerarmen stoppe halvvejs på tværs af vinduet, når kontakten var sat til "off"-position. I stedet for at motorens strømforsyning afbrydes, forbliver den tændt, indtil nulpunktet er nået.
Motordele til vinduesvisker:
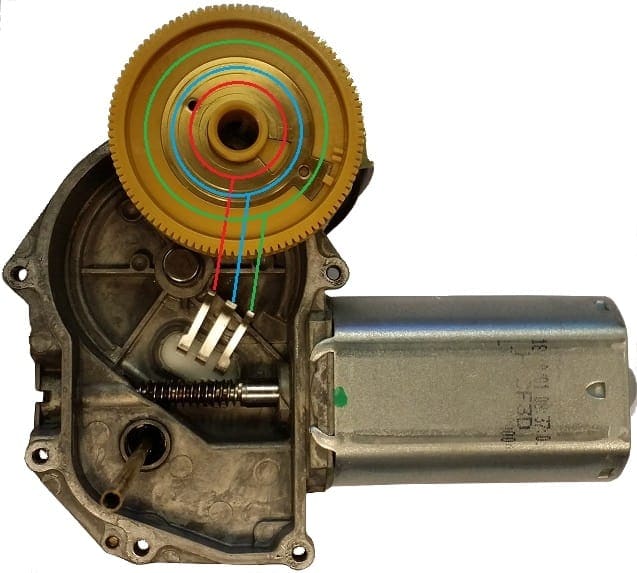
For at give vinduesviskerarmen mulighed for at bevæge sig tilbage til sin startposition, indeholder den en indvendig kontaktplade med glidende kontakter. De følgende billeder forklarer, hvordan viskermotoren fungerer.
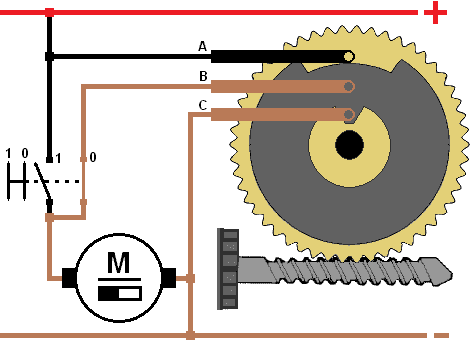
Bagpladen på forrudeviskermotoren er fjernet. Den røde pil angiver, hvor den runde knast på mekanismen i bagpladen bevæger sig frem og tilbage. Mekanismen sikrer, at det gule plastgears roterende bevægelse omdannes til en frem og tilbage bevægelse af udgangsakslen. Udgangsakslen er opretstående på figuren. Vinduesviskerarmen er monteret på denne aksel.

Billedet til højre viser den udskårne viskermotor med snekkegear og plastgear. Her er mekanismen blevet adskilt.

Den følgende tekst relaterer til billedet nedenfor. Det gule plastgear er nu vendt. Den ledende kontaktskives indhak og udsparinger er tydeligt synlige her. Rød, blå og grøn angiver, i hvilken position glidekontakterne berører kontaktskiven.
For at give indsigt i de positioner, hvor glidekontakterne kommer i kontakt med den ledende kontaktplade, er disse angivet i farverne rød, blå og grøn. Nedenfor er hvad de glidende kontakter er til:
Rød: Denne viser altid 12 volt, når tændingen er slået til.
Blå: Denne glidekontakt er ansvarlig for nulstillingen.
Grøn: Dette er massen. Motoren er forbundet til denne i nulstilling.
De tre glidende kontakter "slæber" hen over den guldfarvede kontaktplade, når motoren kører. Der er lavet et hak og en udsparing i kontaktpladen. Skydekontakterne rører derfor aldrig alle kontaktskiven på samme tid. Den midterste (angivet med blåt) er ansvarlig for bevægelsen til nulpositionen. Kontaktpladen er ledende; Hvis motoren endnu ikke er i udgangspositionen, er de indre (røde) og de midterste (blå) glidekontakter forbundet med hinanden. Spændingen overføres fra den røde til den blå kontakt via kontaktpladen. Dette gør det muligt for motoren at fortsætte med at køre, indtil den røde glidekontakt når indhakket. I det øjeblik kan den ikke længere overføre spænding til den blå. Styringen af motoren er stoppet.
Samtidig får den ydre glidekontakt kontakt med den blå glidekontakt via udsparingen (markeret med grønt) via kontaktpladen. Den grønne glidekontakt er forbundet til køretøjets jord. Denne glidekontakt fungerer som en slags bremse. Dette bringer vinduesviskermotoren til standsning. Massen føres videre til blå via grøn. Motoren er kortsluttet til jord på begge sider og forbliver derfor i nulstilling.
Tilslutning af viskermotor:
For at tilslutte ledningerne til viskermotoren skal betjeningen af blandt andet kontaktpladen og glidekontakterne studeres. Først når du forstår, på hvilke punkter der vil være spændinger, kan du fortsætte med at måle og tilslutte ledningerne.
Ledningsnettet i bagklappen til bagviskermotoren består ofte af tre eller fire ledninger. En konstant spænding, switched spænding og en jord skal måles på disse ledninger. Den resterende ledning, som der ikke måles på, har ofte en forsyningsspænding (ved jordforbundet motor) eller en positiv (ved en pluskoblet motor), når motoren er i hvileposition. En måling kan kun udføres på denne ledning, når alle ledninger er tilsluttet, og viskermotoren er i startposition. I alle andre tilfælde måles intet.
Der er plus-forbundne og jordforbundne vinduesviskermotorer. Det betyder, at kontakten er placeret på plus- eller jordsiden af elmotoren. Dette er meget vigtigt at vide før måling. Kapitlerne nedenfor beskriver hvert trin i detaljer. Vær meget opmærksom på forskellene mellem plus- og jordvarianterne!
Forrudeviskermotor positiv:
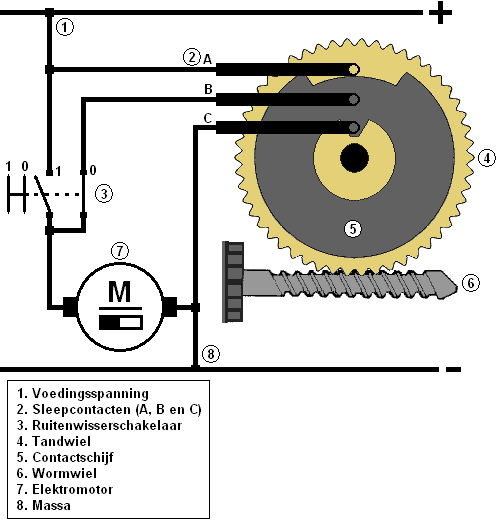
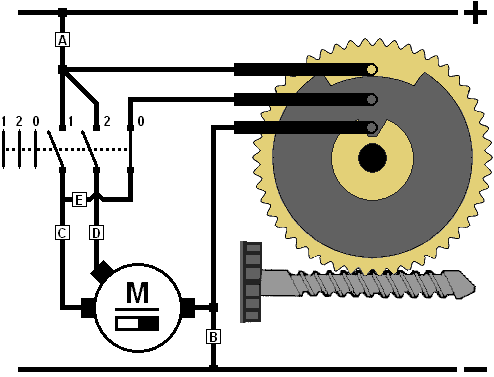
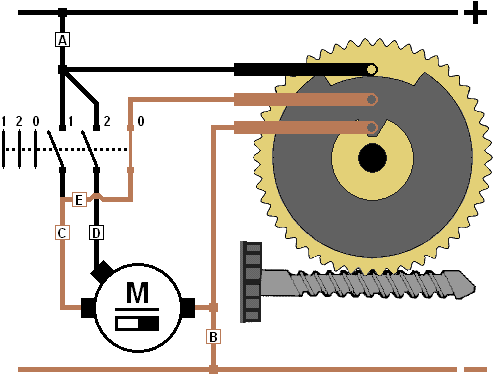
Diagrammerne kan også bruges til at bestemme, hvordan dette skal hænge sammen med fx den berygtede del af den praktiske eksamen. Nedenfor er et diagram med en forklaring af den plus-switchede bagviskermotor. Viskermotoren stoppes, og kontakten "0" er lukket.
Elmotoren (7) modtager kun direkte batterispænding ved konstant hastighed. I så fald er kontakt 1 lukket, og kontakt 0 er åben. Elmotoren (7) driver snekkegearet (6), som igen roterer gearet (4). Den grå ledende kontaktskive er fastgjort til plastgearet og vil derfor også rotere. Når viskerkontakten er sat til slukket position, sørger kontaktskiven (5) og glidekontakterne A, B og C (2) for, at motoren standser i den korrekte position. Dette er afklaret nedenfor.
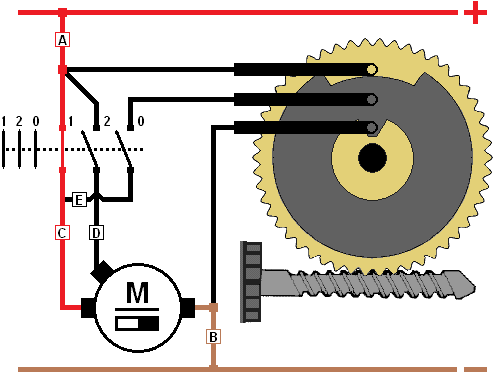
Forrudeviskermotor tændt:
I denne situation er viskermotoren tændt. Forsyningsspændingen forsynes via den røde positive ledning. Kontakt 1 er lukket, hvilket giver motoren en konstant forsyningsspænding. Den anden side af motoren er forbundet til jord, så motoren vil rotere med konstant hastighed. Snekkegearet drives af vinduesviskermotoren og vil derfor rotere. I dette tilfælde har dette ingen indflydelse på spændingsforsyningen til motoren.
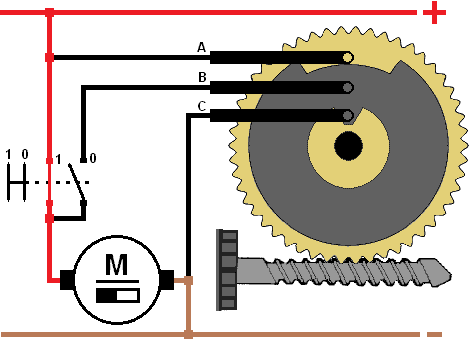
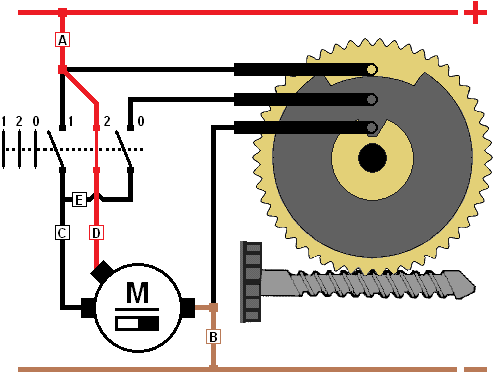
Afbryder i slukket position, vinduesvisker stadig i bevægelse:
På billedet nedenfor er vinduesviskerkontakten sat til "off"-positionen. Det betyder, at kontakt 1 åbnes og kontakt 0 (fra nulstilling) lukkes. I dette øjeblik løber der en strøm via glidekontakt A, via den grå kontaktplade til glidekontakt B. Strømmen går derefter fra glidekontakt B, via kontakt 0 til viskermotoren. Fordi gearet drives af viskermotoren via snekkegearet, vil kontaktpladen også rotere. Indtil indhakkene på kontaktpladen vender tilbage til toppen, vil motoren fortsætte med at køre.
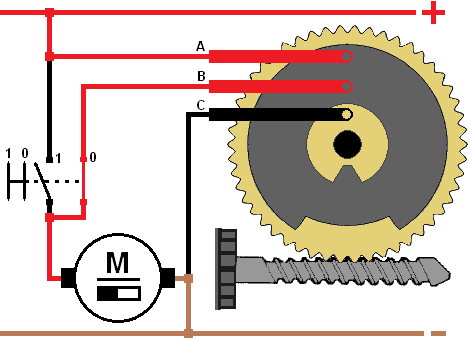
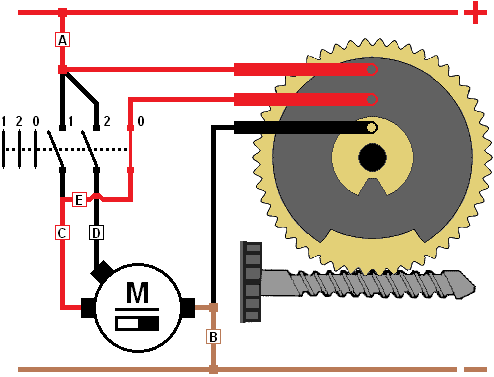
Afbryder i slukket position; forrudevisker stopper:
Gearet fortsætter med at rotere, indtil indhakkene på kontaktpladen er øverst. Dette afbryder kontakten mellem glidende kontakter A og B. Viskerkontakt A er isoleret af det (gule) plastgear, så der ikke kan gå mere strøm til glidekontakt B. Der vil derfor ikke længere gå strøm til viskermotoren. Når kontaktpladen er drejet langt nok, får glidekontakt C også kontakt med den lille ledende del af kontaktpladen. I dette øjeblik er glidekontakterne B og C forbundet med hinanden. Fordi C altid er forbundet med jord, får B nu også jordkontakt via kontaktpladen. Vinduesviskermotoren er i øjeblikket forbundet med jord på begge sider, så den straks går i stå. Så dette fungerer faktisk som en slags bremse. På denne måde stopper viskermotoren altid samme sted.
Animation:
Denne animation viser tydeligt de forskellige positioner af kontakten og kontaktpladen. Her er en kort opsummering af forklaringen ovenfor.
- slukket: kontakten er i nulstilling og elmotoren er kortsluttet med plus og jord.
- tændt, konstant hastighed: kontakten er i position 1 og kontaktpladen foretager to omdrejninger med uret. I denne position bruges kontaktpladen ikke.
- Kontaktposition 0, drejer til nulstilling: kontaktskiven leverer strøm til motoren, indtil indhakkene har nået glidekontakterne.
- AB (plus afbrudt), BC tage kontakt. Dette har en bremsevirkning på motoren, som så går i stå næsten med det samme.

For eksempel, når der skal tilsluttes kabler under en praktisk eksamen, skal de korrekte afbryderpositioner findes. Med diagrammet over viskermotoren kan du aflæse hvilken pind i stikket der er ansvarlig for strømforsyningen, jord eller nulstillingen. Ved at måle i bilens ledningsnet, hvilken ledning der har 12 Volt på, kan den allerede tilsluttes. Ved hjælp af en modstandsmåling kan det bestemmes, hvilken forbindelse der er jord. Ohmmeteret vil indikere en modstandsværdi på mindre end 1 Ohm ved denne forbindelse. Den negative ledning skal naturligvis holdes på et godt jordpunkt på karrosseriet. Ved derefter at flytte kontakten til flere positioner, kan du finde ud af, hvilken ledning der hører til hvilken position af kontakten. Diagrammet kan derefter bruges til at bestemme, hvilke ledninger der skal forbindes med hinanden.
Fra teori til producentens skema:
Teorien om bagviskermotoren blev diskuteret i det foregående afsnit. Diagrammerne viser tydeligt, hvordan kontaktpladen i den udskårne viskermotor sikrer, at motoren får spænding for at rotere tilbage til udgangspositionen. Dette afsnit forklarer, hvordan dette diagram kan oversættes til en producents diagram.
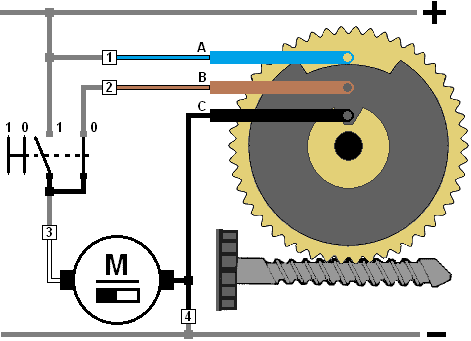
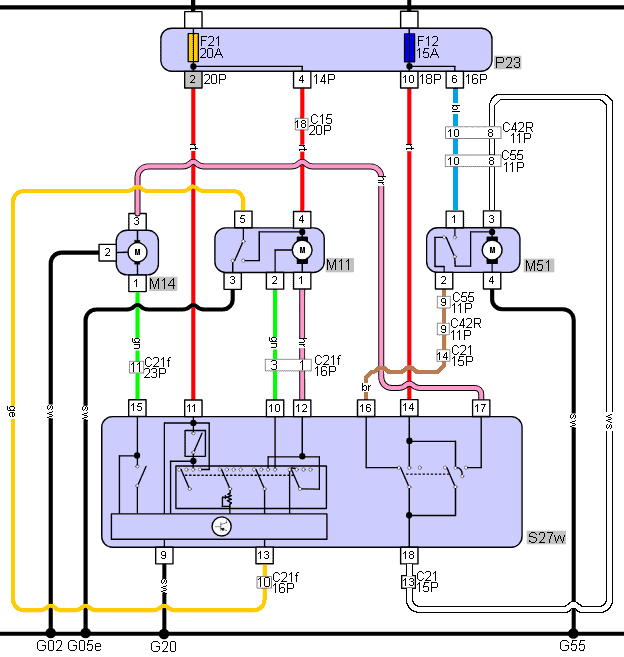
Under elektrisk diagram er baseret på bagviskermotoren på en Hyundai Getz. Ledningsfarverne (blå, brun, hvid og sort) svarer til bilens farver.
Nummer 1 til 4 i diagrammet til højre og nedenfor viser stifterne på det stik, der forbinder forrudeviskermotoren med bilens ledningsnet. Tallene og ledningsfarverne i begge diagrammer stemmer overens. Diagrammet nedenfor er hentet fra HGS-data.com. Den bagerste viskermotor har komponentkoden: M51.
I begge diagrammer kan du se, at den blå ledning (ben 1 i stikket) er den konstante positive ledning fra sikringen. Den brune ledning (ben 2) er ansvarlig for at vende tilbage til nulpositionen. Diagrammet nedenfor viser kontaktpladen som en mekanisk afbryder. Den omkoblede positive ledning fra kontakten er forbundet til den hvide ledning (ben 3). Den sorte ledning er jordledningen (ben 4) og er forbundet til et jordpunkt på kroppen (G55).
I hvileposition er elmotoren kortsluttet til jord; de hvide og brune ledninger forbindes med hinanden via kontaktskiven.
To-trins viskermotor:
Indtil videre er det kun engangsviskermotoren, der er blevet diskuteret. Dette er velegnet til bagruden. Vinduesviskermotoren kan ofte køre med to forskellige hastigheder, nemlig den normale hastighed, der bruges til både intermitterende (første position af kontakten) og kontinuerlig visker (anden position) og høj hastighed (den tredje position). Der er derfor en hastighedsforskel mellem den anden og tredje position af vinduesviskerkontakten, hvor elmotoren roterer. Dette opnås ved at bruge flere kulbørster. En-trins viskermotoren har to kulbørster, to-speed viskermotoren har tre. Figuren til højre viser symbolerne for en enkelt- og dobbelthastighedsviskermotor.
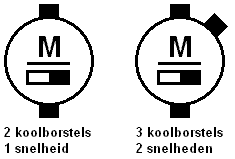
Ved den højere hastighed tændes færre ankerviklinger. Modspændingen genereret ved at dreje ankeret er nu mindre. Fordi der genereres mindre modspænding, kører ankeret, og i sidste ende hele den elektriske motor, med en højere hastighed.
To-gears viskermotordiagrammet ligner meget det, der er diskuteret ovenfor. Her tændes forrudeviskermotoren igen.
Der er nu tre positioner af kontakten synlige.
– Position 1: lav hastighed, konstant rotation.
– Position 2: høj hastighed, konstant rotation.
– Position 0: sluk, drej tilbage til startposition (nulstilling).
I diagrammet til højre er den første position aktiveret. Dette er den lave hastighed.
Mode 2 er aktiveret her. Nu får motoren plusset via en anden kulbørste. Der er nu en lavere modspænding i elmotoren, hvilket gør, at hastigheden er højere, end da den anden kulbørste var tilsluttet.
I denne tidsplan er position 0 valgt. Motoren slukkes, men vender først tilbage til udgangspositionen. Kontaktpladen forbinder glidekontakterne A og B, så viskermotoren stadig har forsyningsspænding. Når kontaktpladen drejes 180 grader yderligere, afbrydes kontakten mellem glidekontakterne A og B, hvilket får forsyningsspændingen til at svigte.
Betjeningen af kontaktpladen og glidekontakter er den samme som med 1-trins viskermotoren.
I denne situation er kontaktpladen blevet drejet igen, således at glidekontakterne B og C nu kommer i kontakt med hinanden. Motoren er nu jordet på begge sider. Viskermotoren forbliver i denne position, indtil den tændes igen.
LIN bus styret viskermotor:
De tidligere nævnte systemer bruger spændingskontrol fra vinduesviskerkontakten. Moderne biler bruger i stigende grad kontrol via LIN-bus. Styreenheden styrer forrudeviskermotoren. Flere indgange fra både kontakten (S) og regn/lyssensoren (RLS) giver et signal til ECU'en om at tænde for vinduesviskermotoren (RWM), viske ved en anden hastighed eller slukke.
Diagrammet viser de komponenter, der styrer forrudeviskermotoren.
Kontakten (S) er forbundet til ECU'en med de tre grønne ledninger. Kontaktens position overføres via disse ledninger.
Switchen har derfor ingen direkte forbindelse til RWM, som det var tilfældet med den konventionelle styring. RLS modtager sin strøm fra ECU'en (12 volt), får sin jord via et jordpunkt og sender sit signal via LIN-busledningen til de andre tilsluttede komponenter. RWM styres af et signal på LIN-bussen. Styreenheden i RWM (genkendelig på transistorskiltet) sikrer selve styringen af elmotoren.

I den konventionelle forrudeviskermotor forårsagede positionen af den ledende kontaktplade bevægelsen til nulstillingen. Med en LIN-busstyret viskermotor er denne kontaktplade erstattet af en positionsskive og Hall-sensorer. Positionsskivens position afhænger af plastgearets position og derfor af viskerarmens position. Positionsskiven er opdelt i et antal nord- og sydpoler (N for nord og S for syd). Fordi hver nord- og sydpol på positionsskiven har en forskellig størrelse, kan styreenheden i RWM bestemme gearets nøjagtige position ved hjælp af Hall-sensorerne. Når RLS eller kontakten afslutter styringen af vinduesviskermotoren, styrer styreenheden i RWM den elektriske motor, indtil positionsskiven har nået "nulpositionen".
Fordelene ved denne kontrol er:
- PWM-styring gør det muligt at køre forskellige hastigheder.
- Rotationsretningen af den elektriske motor kan vendes; når man drejer med uret, bevæger viskerarmene sig op, og når man drejer mod uret, bevæger viskerarmene sig ned. Dette giver mulighed for en mindre installationsplads til vinduesviskermekanismen.
- Nulpositionen kan variere; ved nogle gange at flytte viskerbladene en lille smule op, vipper viskerbladets gummi i den anden retning. Vinduesviskerbladet indtager ikke altid samme position på forruden. Dette har en positiv indflydelse på viskerbladets levetid.
LIN-bussignalet kan måles med et oscilloskop. Det viste scope-billede er af kommunikationen mellem ECU'en (masteren) og regn-/lyssensoren og viskermotoren (slaverne).

Pagina op LIN bus strukturen af en LIN-busmeddelelse er beskrevet. Kommunikationen af vinduesviskersystemet er også beskrevet detaljeret, og det forklares, hvordan fejl i LIN-bussignalet kan genkendes.