emner:
- Bestem og installer sensorer til motorstyringssystemet
- Krumtapakselpositionssensor
- Pulshjul
- Kort sensor
- Kølevæsketemperaturføler
- Lambda sensor
Bestem og installer sensorer til motorstyringssystemet:
Motorstyringssystemet kræver et antal sensorer. Sensorer tjener som "input" af systemet. Sensorer konverterer en fysisk størrelse til et elektrisk signal, der kan behandles af en computer, i dette tilfælde MegaSquirt.
Samlingsprocessen af MegaSquirt skal tage højde for de komponenter, der skal monteres på motoren, fordi strukturen af MegaSquirt kan variere.
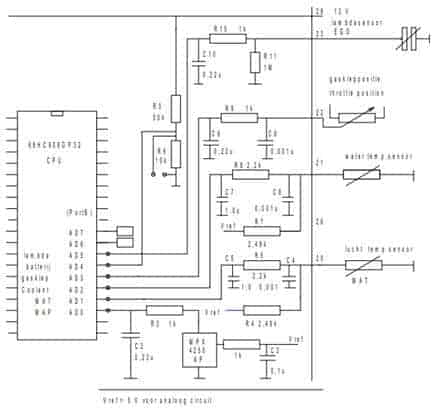
Figuren viser de forskellige sensorkredsløb, hvori disse komponenter er placeret. Indgangssignalerne vist på figuren kommer fra lambdasensoren, gashåndtagets positionssensor, kølevæsketemperatursensoren og lufttemperatursensoren.
Udover sensorerne indeholder diagrammet også en række modstande og kondensatorer. Sammensætningen af disse komponenter danner filtre; Disse filtre tjener til at fange interferenssignaler og støj. Hvis sensorsignalet forvrænges af støj, kan det have store konsekvenser for styringen af aktuatorerne og dermed også for motorens funktion.
Krumtapakselpositionssensor:
Et vigtigt input til motorstyringssystemet er krumtapakslens hastighed.
Krumtapakselhastigheden måles ved hjælp af en krumtapakselpositionssensor og et pulshjul. Krumtapakselpositionssensoren har to vigtige funktioner:
- Krumtapakslens hastighed kan bestemmes ud fra frekvensen af signalet;
- Den manglende tand i pulshjulet angiver krumtapakslens position, hvor stemplerne på cylinder 1 og 4 er et par grader før TDC.
Motorhastigheden påvirker styringen af injektorerne og tændingen. Den manglende tand i 36-1 pulshjulet er vigtig for at bestemme tændings- og indsprøjtningstider. Det blev besluttet at bruge en Hall-sensor og ikke induktionsimpulsgeneratoren som hastighedssensor. En induktiv sensor genererer en vekselspænding, der skal omdannes til en jævnspænding i MegaSquirt-controlleren. En Hall-sensor genererer en firkantbølgespænding, som forstærkes til en spænding på 5 eller 12 volt med en intern eller ekstern pull-up modstand. Dette gør Hall-sensoren mere velegnet til at danne et pålideligt signal. Dette valg skal træffes på forhånd før montering af MegaSquirt; begge sensorer kræver en anden kredsløbskonstruktion.
Pulshjul:
Krumtapakselpositionssensoren måler en ændring i luftgabet i et pulshjul monteret på motoren. Land Rover-motoren har dog ikke oprindeligt en krumtapakselpositionssensor og derfor intet pulshjul. Pulshjulet skulle derfor monteres efterfølgende. Der er tænkt meget over placeringen og positionen af pulshjulet. Mulighederne var:
- En skive med 36 tænder, der er fastgjort udvendigt på krumtapremskiven ved hjælp af en klemme eller boltforbindelse.
- Justering af den aktuelle krumtapakselremskive ved at fræse tænder fra remskiven.
Det er almindeligt at bruge et 36-1 eller et 60-2 pulshjul. 60-tands pulshjulet bruges hovedsageligt til større diametre. 36-1 er velegnet til brug på grund af dens tandbredde. Det er meget vigtigt, at pulshjulet har så lidt højdevandring som muligt. En højdeændring betyder en ændring i magnetfeltet mellem sensoren og pulshjulets tænder. Dette kan have negative konsekvenser for motorens drift. Dette skal naturligvis forhindres. Justering af den nuværende krumtapakselremskive var derfor at foretrække. Yderkanten af den eksisterende krumtapremskive er bearbejdet på en fræsemaskine. Der er lavet hak ved at fjerne materiale. De resterende 36 tænder tjener til at give sensoren mulighed for at måle ændringerne i magnetfelterne. En tand er blevet slebet væk til referencepunktet. Billedet nedenfor viser den bearbejdede krumtapakselremskive.
Den jordede tand er synlig i toppen af pulshjulet lige under sensoren. Når krumtapakslen er i denne position betyder det ikke, at stemplerne på cylinder 1 og 4 er ved TDC, men at disse stempler er 90 grader før TDC, hvilket svarer til 9 tænder (360/36). I det øjeblik den manglende tand passerer, modtager MegaSquirt et signal om, at tændingen snart skal finde sted. Fra det tidspunkt og fremefter beregnes det, hvornår tændspolen skal aktiveres. Ved varierende driftsforhold bestemmes også fortændingstidspunktet ud fra dette referencepunkt.

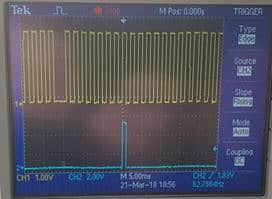
Billedet fra oscilloskopet (se billede) viser krumtapakselsignalet (øverst) sammenlignet med tændspolens styresignal (nederst). Styreimpulsen til tændspolen dannes ved den ottende tand efter den manglende. Når motoren går i tomgang fremføres tændingen 10 grader, hvilket svarer til 1 tand. Dette svarer til de 90 grader (9 tænder) mellem den fjernede tand og det faktiske øverste dødpunkt.
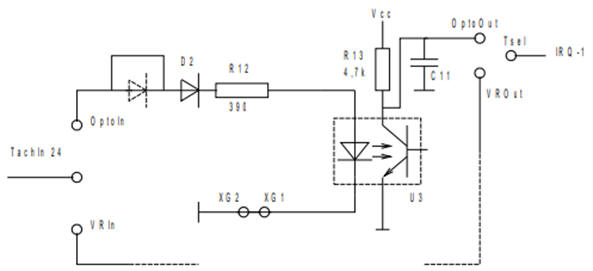
For at samle Hall-sensorkredsløbet i MegaSquirt skal kondensator C11, modstande R12 og R13, diode D2 og optokobler U3 installeres (se figuren nedenfor). Signalet fra Hall-sensoren kommer ind i diagrammet i figur 105 under "Opto in". Signalet ankommer til den såkaldte opto-kobler via dioden og modstanden. Denne komponent er angivet med en stiplet linje. Optokobleren er et lille integreret kredsløb, hvor LED'en på venstre side leder fototransistoren på højre side, når den er tændt. Optokobleren kan ses som en kontakt uden mekaniske eller elektriske forbindelser mellem styre- og koblingsdelene.
Når transistoren i optokobleren er ledende, kan der strømme en lille strøm fra Vcc til jord. I det øjeblik er der en spænding på 0 volt på "Opto Out". Hvis transistoren ikke er ledende, er der ingen strøm og derfor intet spændingsfald over modstand R13. Spændingen på "Opto out" er så 5 volt.
Ved at bruge en optokobler laves en galvanisk adskillelse mellem dioden og fototransistoren. Farlige interferensspændinger holdes således ude af mikrocontrollerkredsløbet, da gennemslagsspændingen normalt er større end 5 kV.
MAP sensor:
En MAP-sensor (Manifold Absolute Pressure-sensor) måler trykket i indsugningsmanifolden. MegaSquirt bruger dette tryk, motorhastigheden og indløbstemperaturen til at beregne mængden af luft, der kommer ind i motoren. Med Land Rover-motoren måles et absolut tryk (det udvendige lufttryk) eller undertryk. Dette er en naturligt aspireret motor, der suger sin egen luft ind. Motorer udstyret med turbo skal klare overtryk i indsugningsmanifolden. Måleområdet for en MAP-sensor er normalt mellem 0,2 og 1.1 bar.
Trykket i indsugningsmanifolden kan sammen med gasspjældsventilens åbningsvinkel (som måles med gasspjældpositionssensoren) og motorhastigheden bestemme motorbelastningen. På grund af manglen på en MAF-sensor (Manifold Air Flow) beregnes mængden af suget luft ud fra motordata og undertrykket i indsugningsmanifolden. Det blev besluttet ikke at bruge en MAF-sensor, fordi signalet er mindre pålideligt, fordi det ikke er designet til motoren. At matche indstillingerne til indsugningsmanifoldens egenskaber er komplekst. Der kræves mange korrektionsfaktorer til dette.
Den anvendte MPX4250AP MAP-sensor er vist på figuren. MegaSquirt printkortet er som standard udstyret med tilslutningsmuligheder for denne type MAP sensor. Denne sensor er også inkluderet som standard i byggesættet. Mængden af indsprøjtet brændstof afhænger blandt andet af mængden af tilstedeværende luft, fordi man forsøger at opnå et støkiometrisk blandingsforhold (14,68 kg luft til 1 kg brændstof). Der var en mulighed for ikke at bruge både MAF- og MAP-sensorerne. Mængden af indsuget luft ville så blive bestemt efter en såkaldt Alpha-N-regulering. Der tages hensyn til gasventilens position, hvilket er afgørende for den tilstedeværende luftmængde. Dette er dog mindre præcist end en MAP-sensor, så denne blev ikke valgt. I dette projekt bruges gashåndtagets positionssensor kun til accelerationsberigelse.

Kølevæsketemperaturføler:
I det klassiske setup er der ingen temperaturfølere på motorblokken. Motoren er som standard udstyret med et bimetal, der har den funktion at tænde instrumentbrætlyset, hvis kølevæsketemperaturen er for høj. Fordi motorstyringssystemet tager højde for kølevæskens og indsugningsluftens temperatur, blev det besluttet at eftermontere NTC-modstande. En NTC-modstand har en negativ temperaturkoefficient. Det betyder, at modstandsværdien falder i takt med at temperaturen stiger. Den valgte kølevæsketemperaturføler er en føler, der har en modstandsværdi på 2,5 kiloohm ved 25⁰ Celsius. Modstandsændringen er størst i det vigtigste temperaturområde. NTC-modstandens egenskaber skal kortlægges for at beregne en korrekt temperatur.
Modstandsændringen er størst ved en ændring i temperaturområdet mellem 0⁰C og 60⁰C. Dette kan ses af karakteristikkens forløb; i det nævnte temperaturområde er der et modstandsfald på cirka 5kΩ, mens ved T ≥ 60⁰C falder modstanden næsten ikke. I nogle tilfælde er det ønskeligt også at måle temperaturer over 60°C. For at gøre dette muligt kan den interne forspændingsmodstand skiftes til en forspændingsmodstand med en anden værdi ved en bestemt temperatur. Dette giver to NTC-karakteristika. I dette projekt bruges kølevæsketemperaturen dog udelukkende til koldstartberigelsen, som næsten ikke bruges over 60°C.
De lave temperaturer er også de mest interessante; koldstartberigelse vil finde sted her; injektoren er aktiveret i længere tid, når motoren er kold. Når motoren er varmet tilstrækkeligt op (T ≥ 60⁰C), sker der mindre og mindre berigelse. Fra en T = 90⁰C kører injektionsstrategien i henhold til de indstillede værdier i referencefeltet. Referencefeltet er en indtastet standardværdi. Eksterne faktorer, såsom en koldstartberigelse ved lav temperatur, danner en korrektionsfaktor til denne standardværdi. MegaSquirt tager ikke længere højde for kølevæsketemperaturen.
Lambdasonde:
Der er monteret en lambdasensor (sensor) i udstødningen, der måler luft/brændstofforholdet i udstødningsgasserne. Lambdasonden har en vigtig opgave med at "tune" motorstyringen på et senere tidspunkt ved at udfylde AFR- og VE-tabellerne. For at få indsigt i det ideelle blandingsforhold og nytten og nødvendigheden af at berige eller forarme, defineres først det støkiometriske blandingsforhold, berigelse og udtømning.
Det støkiometriske blandingsforhold angiver forholdet mellem luft og brændstof, hvori al ilten fra luften bruges. Dette er tilfældet med forholdet 14,68:1 (afrundet til 14,7 kg luft til 1 kg benzin). Vi taler så om λ = 1.
Lambdaværdien kan variere under forskellige driftsforhold:
- Berigelse: λ < 1;
- Fattig: λ > 1.
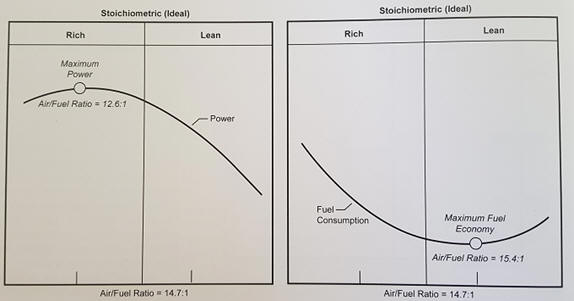
Berigelse til λ = 0,8 betyder, at der gælder et blandingsforhold på 11,76 kg luft til 1 kg benzin. Så der er mindre luft til rådighed til at forbrænde 1 kg brændstof. Berigelse eller udtømning af blandingen skal altid forblive inden for eksplosionsgrænserne. Berigelsen finder sted, når motoren skal levere mere kraft. En rigere blanding giver også afkøling. En mager blanding giver derimod et bedre brændstofforbrug. Billedet nedenfor viser to grafer, der viser maksimal effekt og laveste brændstofforbrug.
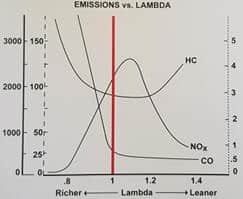
Lambdaværdien påvirker ikke kun effekt og brændstofforbrug, men også udstødningsemissionen. En rigere blanding sikrer et lavere NOx-indhold, men også højere CO- og HC-emissioner. Med en slankere blanding er brændstofpartiklerne længere fra hinanden, så forbrændingen ikke længere er optimal; med det resultat, at HC-udledningen også stiger. Billedet nedenfor viser emissionerne relateret til lambdaværdien. Ved brug af en katalysator er det ønskeligt at sikre, at injektionen konstant skifter mellem rig og mager. I en rig blanding dannes CO som følge af iltmangel, hvormed katalysatoren reducerer NOx. En mager blanding indeholder et overskud af ilt, som oxiderer CO og HC.
Der findes to typer lambdasensorer; springsensoren og bredbåndssensoren. MegaSquirt understøtter begge typer. Ved opstilling af VE-bordet er en springsensor dog uegnet, og der blev derfor valgt at bruge bredbåndssensoren. VE-tabellen indstilles ved at justere VE-værdierne til den målte AFR. Selvom VE-værdierne i princippet kan indtastes gennem beregninger og i høj grad baseret på momentkurven, ligger AFR hurtigt uden for springsensorens rækkevidde. En bredbåndssensor tilbyder en løsning på grund af dets store måleområde; den kan måle en AFR mellem 8,0 og 1,4. Blandingssammensætningen vil i næsten alle tilfælde ligge i dette måleområde, når motoren kører, så bredbåndssensoren er velegnet til at opstille VE-tabellen. Tuning uden bredbåndssensoren er praktisk talt umulig.
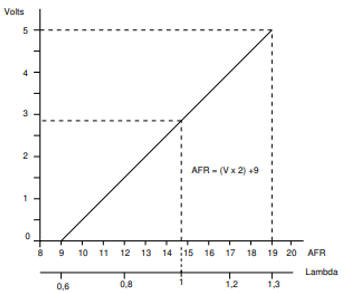
MegaSquirt har ikke en intern lambda-controller. Når egenskaberne for bredbåndssensoren er kendt, kan de indtastes i en tabel i programmet TunerStudio. I andre tilfælde kræves en bredbåndssensor med ekstern controller. Udgangsspændingen er lavet lineær af den eksterne controller. Udgangsspændingen fra controlleren til MegaSquirt er mellem 0 og 5 volt, hvor forholdet mellem lambdaværdien og spændingen er lineært. Spændingsværdien konverteres til en lambdaværdi i MegaSquirt. Figuren viser grafen med den lineære gradient.
Næste: Aktuatorer.