emner:
- Styreteknologi
- Processtyring baseret på driftsforhold
Styringsteknologi:
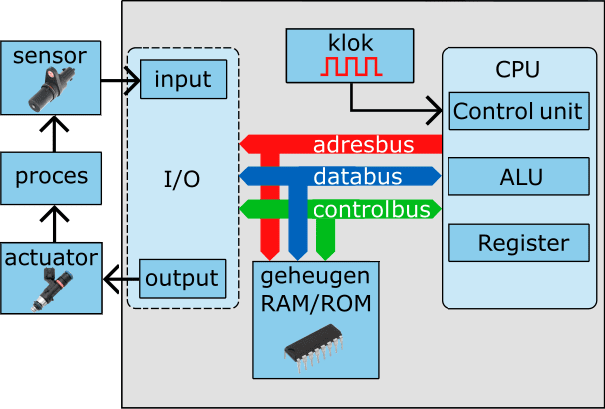
ECU'en måler, kontrollerer og regulerer processerne. ECU'en modtager information fra sensorer. En sensor konverterer en ændring i en fysisk størrelse til et elektrisk signal. Denne sensorinformation kommer ind i ECU'en via indgangen. Mulige indgangssignaler kommer fra:
- hastighed sensor;
- temperatur måler;
- belastning (negativt tryk) sensor;
- iltsensor.
De oplysninger, der kommer ind, fører ikke nødvendigvis direkte til en handling. Kun når en målt værdi afviger fra den ønskede værdi, kan styringen af aktuatoren justeres. ECU'en har så en "regulerende" funktion. Ja/nej beslutninger træffes ved hjælp af det forprogrammerede computerprogram (ROM / Flash-hukommelse).
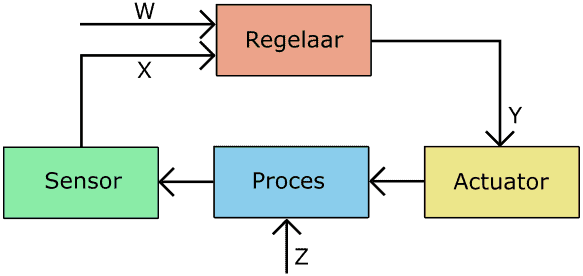
At måle: sensoren, i dette tilfælde en sensor, måler en fysisk størrelse og konverterer den til et elektrisk signal. Denne målte værdi (X) sendes til regulatoren. Den målte værdi behøver ikke nødvendigvis at føre direkte til en handling; tænk på en konstant temperatur.

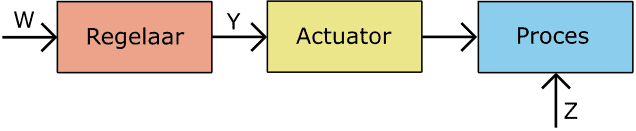
At styre: regulatoren (ECU) styrer en aktuator. Der er ingen feedback fra en sensor, så ECU'en følger ikke processekvensen. En fejl i processen er derfor ikke altid erkendt. Et eksempel på styringen er manuel betjening af hornet (W); ECU'en styrer hornet (Y), når kontakten betjenes. Der er ingen kontrolfunktion på hornet, så fejl (Z) genkendes ikke.
At arrangere: regulatoren kan behandle en manuel kommando (W) eller en målt sensorværdi (X) til en aktuatorstyring. Aktuatoren forårsager en ændring i processen; overveje for eksempel injektionsvarigheden. At injicere mere betyder en rigere blanding. Iltindholdet måles af lambdasensoren og sender denne målte værdi (X) til regulatoren. Når en uforudset fejl er til stede (f.eks. en blokering i en injektor), forårsager dette en ændring (Z) af processen. Denne afvigelse måles også af sensoren, så regulatoren kan justere processen ved hjælp af aktuatorstyringen.
Proceskontrol baseret på driftsforhold:
En forbrændingsmotors motorstyringssystem skal forbrænde blandingen optimalt under alle driftsforhold. Bestemmelse af blandingssammensætning og tændingstidspunkt er afgørende for at garantere udstødningsgassammensætningen (emission), økonomi og opnå den ønskede effekt.
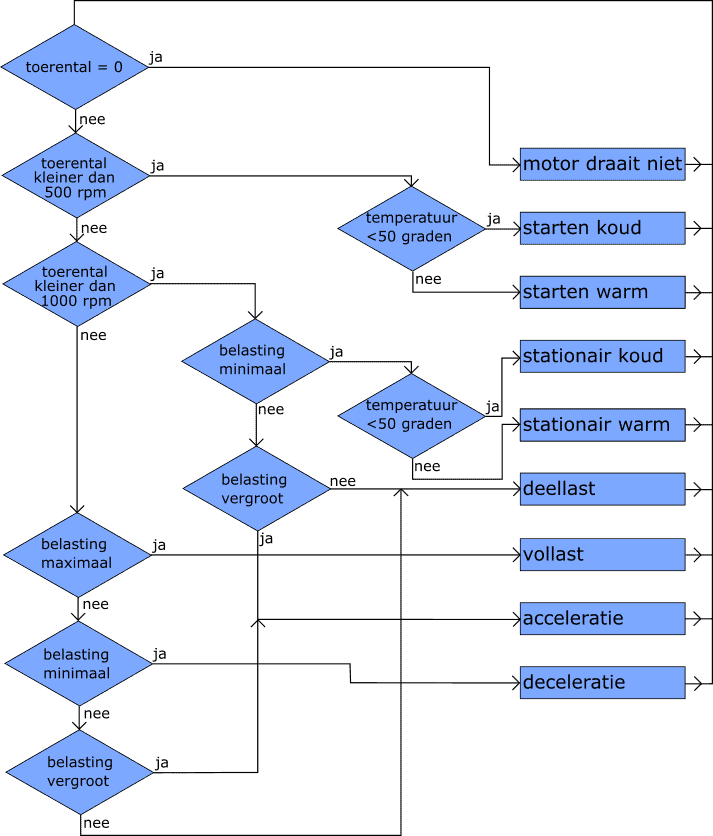
Hver driftstilstand har sin egen styreteknologi:
- Koldstart: blandingen er rig og tændingen er sen;
- Varm start: blandingen er mindre rig end under koldstart;
- Kold tomgang: Blandingen er rig og tomgangshastigheden øges;
- Varm tomgang: Blandingen er mindre rig ved en lavere tomgangshastighed;
- Delbelastning: blanding støkiometrisk, hastighedsområde mellem 1500 og 4000 rpm, tændingstidspunkt er foruddefineret, lambdastyring er aktiv;
- Fuld belastning: blandingen er beriget, belastning og hastighed er høj;
- Acceleration: blanding rig, tænding sent;
- Deceleration: blanding mager, tænding tidligt.
Relaterede sider: