emner:
- Solgear, holder og ring gear
- Automatisk gearkasse
- Planetgearsystem transmissioner
- Beregn første gear udveksling
- Beregn det andet gear gear
- Beregn tredje gear gear
Solgear, holder og ring gear:
Et planetgearsystem består af mindst et sæt tandhjul, hver med et solgear, en holder og et ringhjul. Grundlæggende viden om betjeningen af planetgearsystemet er derfor påkrævet (såsom drejning af solgearet, holder med satellitgear og ringgearet, se side automatisk gearkasse).
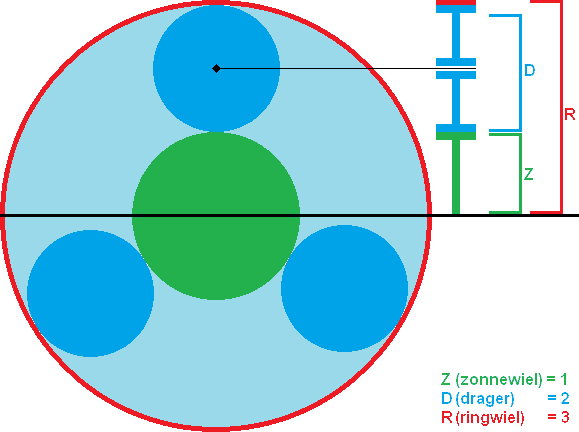
Nedenfor er et billede af et gearsæt, hvor solhjulet er grønt, holderen med satellitgearene er blå og ringhjulet er rødt. Det ses tydeligt, at gearsættet er delt i to. Beregning sker med ligninger, så det gør ikke noget, om alt er divideret med to. Proportionerne forbliver trods alt de samme.
Længere på denne side vil vi beregne med forholdene Z, D og R. Ved at følge linjerne, der forbinder forskellige planetsystemer, kan det samlede udvekslingsforhold for det relevante gear bestemmes ved hjælp af forholdene for alle Z, D og R. .
Automatisk gearkasse:
En konventionel automatgearkasse fungerer ved at skifte mellem de forskellige planetgearsystemer, se kapitlet automatisk gearkasse.
Nedenfor er en skematisk fremstilling af fire sæt planetgearsystemer i en automatisk transmission. Der er tre systemer til fremadgående gear og et til bakgear. Den røde linje angiver retningen af kræfterne gennem automatgearet; fra venstre (motorside med momentomformer) gennem hele delen med planetsystemer (sorte linjer) til koblingen på propelakslen. Hvis du ser nærmere på systemerne i gearkassen, vil du se, at ovenstående billede er afledt af dem. Der bruges fire systemer i gearkassen, hver med et Z, D og R (solgear, medbringer og ringgear).

Planetgearsystemerne er symmetriske over og under midterlinjen. Der er ingen anden vej, for interiøret roterer under kørslen. For at få indsigt i, hvad der sker, når et gear er sat i, er de drevne dele i planetsystemet på billedet herunder også blevet fremhævet med rødt:

På billedet ovenfor er gear 1 indkoblet. For at sætte gear 1 i, skal en kobling være tilkoblet. Dette link er vist i blåt. Med den lukkede kobling og den ene drevne side af planetsystemet skal den ene del også rotere. I så fald bestemmer delenes dimensioner transmissionsforholdet (tænk på et lille indgangsgear og et stort udgangsgear; det store tandhjul vil så rotere langsommere. Hvis det store tandhjul havde dobbelt så mange tænder som det lille tandhjul, så forholdet ville være 1:2).
Det gælder i princippet også for automatgearet; dimensionerne på ringgear, solgear og satellitgear er forskellige i alle fire systemer. Nu kan du sikkert forestille dig, at når en anden kobling aktiveres (f.eks. systemet til venstre), har hastigheden på udgangsakslen ændret sig.
Længere på denne side forklarer billeder, forklaringer og beregninger, hvordan planetgearsystemerne i automatgearet skiftes under kørslen.
Planetgearsystem transmissioner:
Vi skal nu se på den øverste halvdel af gearkassen (fordi kassen er symmetrisk over og under, se billedet nedenfor). Fra dette billede vil vi bestemme transmissionerne senere på siden. Over systemerne står der hvilket nummer systemet er; fra 1 til 3 og system R (omvendt).
Hver galakse har sit eget Z, D og R. Dette er ikke vist på billedet, men hvis du ser igen på billedet øverst på denne side, vil du genkende det. Dette vil blive betragtet som kendt senere på denne side.
Nederst til venstre på billedet ser du kobling "K4", denne kobling sikrer, at to sider af systemet er forbundet samtidigt; system 3 er forbundet med system 1 og 2. Ingen andre forbindelser er blevet lukket, så hele systemet er "blokeret". Motoromdrejningstallet overføres 1 til 1 til køretøjets hjul, uden udvekslingsforhold; Det kalder vi pris-direkte. Dette er i fjerde gear.
I biler med manuel gearkasse er fjerde gear ofte også direkte-drevet. Også her overføres motoromdrejningstallet 1 til 1 til hjulene.
Forskellen i hastigheden på indgangsakslen (motor eller momentomformer) og udgangsakslen (køretøjet) kaldes gearforholdet.

Første gear er sat i.
Ved at fastgøre bæreren til system I (ved hjælp af kobling K1) kan en kraft overføres fra solhjulet til bæreren. Medbringeren er forbundet med køretøjet, så der nu er en direkte forbindelse mellem motoren og gearkassen. Delenes dimensioner bestemmer et gearforhold (mere om dette senere).
Den røde linje angiver kraftforløbet. Den grønne linje angiver, hvilke andre komponenter der kører, fordi denne er direkte forbundet med den røde linje. Disse dele roterer, men fordi der ikke er nogen kobling aktiveret, sker der ikke noget med dem. De løber bare i tomgang. Den blå linje viser, hvad der er fast, når kobling K1 er spændingsførende. Ikke kun bæreren for system 1 er så fastgjort, men også bæreren for system 3 og solgearet i system R er blokeret.

Som forklaret aktiveres kobling K1, når der skiftes til første gear. Når der skiftes til andet gear, vil kobling K1 blive udkoblet, og en anden kobling vil blive aktiveret. Dette kan ses i tabellen.
Når der skiftes til andet gear, aktiveres kobling K2. Ringgearet i system 2 er derefter fikseret. Fordi solhjulet i system 2 er fastgjort, og solhjulet er drevet, vil holderen rotere. Denne holder vil igen drive system 1. I system 1 er ringen ikke blokeret denne gang, men drevet af et andet system. I så fald vil udgangshastigheden (køretøjets linje) derfor have en lavere hastighed, end da første gear blev skiftet.

Dette afklares yderligere på denne side med billeder, forklaringer og beregninger.
Beregn første gear udveksling:
Ifølge nedenstående tabel er link K1 lukket. Ringgearet er derfor låst. Drivkraften fra motoren passerer gennem solgearet og via medbringeren til køretøjet. Udvekslingerne er også angivet, nemlig 1,00 for solgearet og 3,00 for ringgearet i system 1. Vi regner med dette.
Den grundlæggende formel til beregning af gearforholdene for planetgearsystemer er som følger:
ω står for omega og er Vinkelhastighed mens man drejer.
Fordi vi regner med system 1, sætter vi et 1 efter alt. Vi ændrer dette nummer for følgende systemer. Især i tilfælde af flere systemer (hvor det ene system driver det andet), skal det noteres på denne måde, for ellers bliver det meget forvirrende.
Nedenfor er diagrammet over det første gear. For klarhedens skyld er Z (solhjul), D (bærer) og R (ringhjul) tegnet med blåt.


Vi udfylder nu grundformlen for det første system. Omegaerne er ukendte, og bæreren står stille. Så vi kan ikke udfylde noget for dette. Z1 og D1 er kendte, så dem udfylder vi. R1 er stationær, så det streger vi over. Vi tilføjer ikke noget til formlen.
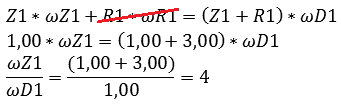
Du kan nu se, at gearforholdet i det første gear er 4.
I bilteknologi sker dette aldrig, det ville altid være lidt over eller under 4, for ellers rører gearene altid hinanden på de samme overflader (ekstra slitage). Men her er det nemmere at regne som eksempel. Du kan nu også se, at omegaerne er kendt!
ωZ1 = 4
ωD1 = 1
Disse omegaer er vinkelhastighederne for akserne i systemet. Omegaerne er ikke rigtig vigtige i første gear, men ved beregning af dobbeltdrevssystemer (som det vil blive tydeligt i andet gear), er de vigtige.
Beregn andet gear gear:
Ved beregning af transmissionsforholdet for det andet gear skal det tages i betragtning, at det første system er dobbeltdrevet; solgearet i system 1 drives af motoren og holderen drives af system 2. Dette resulterer nu i en anden køretøjshastighed end i den situation, hvor ringgearet stod stille (såsom ved første gear).

Ved beregning starter vi altid med det system, der kun er drevet. I dette tilfælde er det system 2, fordi det kun drives af motoren via solgearet.
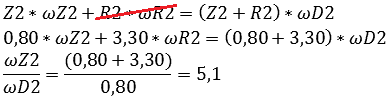
Overførslen udført af det andet system er 5,1. Dette er ikke transmissionen mellem motoren og hjulene, men mellem motoren og system 1. Nu vil vi beregne transmissionsforholdet for system 1 med data fra system 2, fordi omegaerne nu er kendt:
ωZ2 = 4,1
ωD2 = 0,8
Hvis du nu ser på diagrammet, vil du se, at solgearene i system 1 og 2 er forbundet med hinanden. Holderen til system 2 og ringhjulet i system 1 er også forbundet med hinanden. Omegaerne for de forbundne dele er de samme, så vi kan sige:
ωZ2 = ωZ1 = 4,1
ωD2 = ωR1 = 0,8
Det er meget vigtigt, at der bliver kigget nøje på dette! Følg altid linjerne i diagrammet.
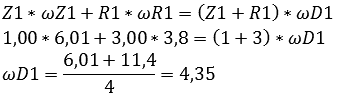
Vi indtaster nu disse omegaer i beregningen af system 1.
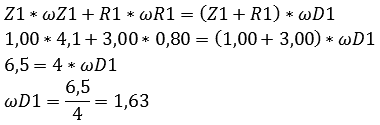
Vi kan nu bestemme det endelige drivforhold ved at dividere input omega med output omega. Hvis vi ser på diagrammet, ser vi, at omegaen fra solgearsystemet 2 er indkommende og omegaen for bæresystemet 1 er udgående.
Det samlede udvekslingsforhold for 2. gear er derfor 2,52.
Beregn tredje gear udveksling:
Ved beregning af tredje gear skal der tages højde for, at alle tre systemer arbejder sammen. Start altid med enkeltdrevsystemet. I dette tilfælde er det den tredje:

Solgearet på system 3 er fast, så det deltager ikke. Indtast derefter resten af alle værdier:
Hermed opnår vi:
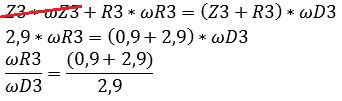
Så går vi til system 2. Du indtaster de omegaer, der er kendt for system 3, i udregningen af system 2:
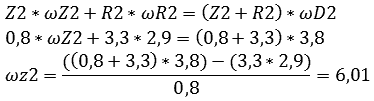
Nu går vi til system 1. Også her indtastes de kendte omegaer:
I sidste ende får vi:
Det betyder, at det samlede udvekslingsforhold for tredje gear er 1,38.
Beregn fjerde gearforhold:
I fjerde gear er kobling K4 lukket. Det betyder, at solgearene i system 1, 2 og 3 er koblet til motoren samtidigt. Hele systemet er nu blokeret. Alle omegaer er lige store.
Hvis alle omegaer er lige store, er intet gearforhold muligt. Motorhastigheden overføres direkte til hjulene. Det kalder vi pris-direkte.