emner:
- Motorstyring med selvdiagnose
- Styrefunktioner og kontrol af motorstyringen
- VE- og AFR-tabeller til bestemmelse af den nødvendige mængde brændstof
- Adaptiv indlæringshukommelse
- Forekomsten af en fejlkode
- Justering af softwaren
Motorstyring med selvdiagnose:
Enhver moderne bil har motorstyring. Dette er navnet på den software, der er indbygget i ECU'en (Electronic Control Unit). Alle sensorer og aktuatorer på motoren er forbundet til ECU'en med ledningsnet. Klik her for mere information om styreenhederne og netværkene i bilen. ECU'ens hovedfunktioner er at styre tænding og indsprøjtning, for at opnå så få emissioner som muligt. Der er mange andre funktioner forbundet omkring dette, som alle påvirker hinanden. Disse er diskuteret nedenfor.
ECU'en behandler de indkommende data (fra sensorerne), behandler dem og styrer derefter aktuatorerne. Et eksempel på en sensor er lambdasensoren. Hvis lambdasensoren måler for højt iltindhold i udstødningsgasserne, sender den dette videre til ECU'en. ECU'en ved så, at blandingen er for mager (for lidt brændstof = for meget ilt i udstødningsgasserne = for mager). ECU'en vil derefter justere indsprøjtningen og tændingen, indtil lambdasensoren sender et korrekt signal.

Når en sensor transmitterer en umulig målt værdi (at kølevæskesensoren angiver en umålelig værdi), eller genkender at ledningerne har en kortslutning til plus eller jord, vil ECU'en automatisk gemme dette som en fejlkode. Fordelen ved den omfattende software er, at det forkerte signal blokeres internt. For eksempel er tændingen og indsprøjtningen ikke justeret til den forkerte temperatur, fordi ECU'en allerede har erkendt, at dette signal er forkert.
ECU'en vil dog styre køleventilatoren fuldt ud, fordi den korrekte temperatur ikke længere kan måles. Som en sikkerhedsforanstaltning er der ekstra køling. En gul motorlampe vil derefter lyse på instrumentbrættet. Bilen skal så læses op. Klik her for at gå til OBD-siden hvor der gives en del forklaring om aflæsningsfejl og diagnoseudstyrets øvrige muligheder.
Et andet eksempel er en tændspole, der har fejlet. Brændstoffet kommer uforbrændt ind i katalysatoren og kan stadig brændes på grund af for høje temperaturer. Krumtapakselsensoren vil registrere en hastighedsudsving på grund af den manglende forbrænding. Positionen af cylinderoverførslen genkendes. Dette stopper med at aktivere injektoren på cylinderen, hvis tændspole er defekt. Motoren er nu i nødtilstand og vil køre med 1 mindre cylinder. Motorfejllampen vil lyse. Ved at læse den vil det tydeliggøre, hvilken cylinder der tænder forkert.
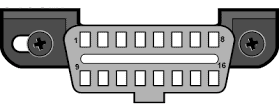
For at udlæse er computerens diagnostiske stik (på billedet) forbundet til OBD-stikket. Dette OBD-stik er normalt placeret i bunden af instrumentbrættet nær fodrummet (nær pedalerne). Stikket kan også være skjult andre steder på instrumentbrættet eller bag askebægre. Ved at tilslutte stikket til udlæsningscomputeren videregives fejlkoderne til computeren.
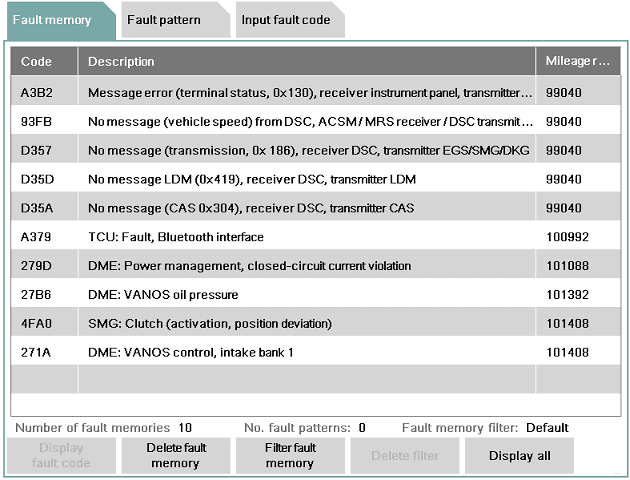
Når bilen aflæses, sender ECU'en en fejlkode til udlæsningscomputeren. Denne fejlkode (OBD-fejlkode) er ofte den samme for hvert mærke. Disse koder kan vises med en læseenhed. Fejlkoden huskes af ECU'en og gemmer også følgende information:
- Hvornår fejlen opstod først og sidst.
- Hvor ofte er fejlen vendt tilbage.
- Om det er en permanent eller (nogle gange) tilbagevendende fejl.
Fejlkoder er ikke altid de samme for alle mærker. Nogle gange er koderne mærkespecifikke. Ved at slå fejlkoden op i Google kan betydningen ofte bestemmes.
Omfattende læseudstyr linker en tekst til denne fejlkode. Koden bliver så faktisk oversat til tekst. For eksempel vil koden P0267 være knyttet til teksten: "Kølevæsketemperatursensor usandsynligt signal; kortslutning med positiv." Opstod først ved kilometertal ……km, frekvens 120, forekom sporadisk. Det er nu klart, at enten har sensoren en intern defekt, eller også kortslutter sensorens signalkabel med et positivt kabel. Dette er sket i alt 120 gange og er ikke permanent til stede. Det kan betyde, at ved at flytte kablerne opstod kortslutningen 120 gange og så forsvandt igen. Det er op til teknikeren at finde ud af, hvor fejlen er placeret.
Når fejlen er løst (f.eks. efter reparation af kablet), kan fejlen slettes. Testudstyret sender så en kode til ECU'en, som så forstår, at fejlen skal skrives fra hukommelsen. Hvis kablet ikke repareres, men kun fejlen slettes, vender denne fejl straks tilbage. Efter sletning vil den første kilometertælleraflæsning være den nuværende, og frekvensen starter fra 1 igen.
Kontrolfunktioner og kontrol af motorstyringen:
Motorstyringens opgave er blandt andet at overvåge eller kontrollere følgende funktioner:
- Motorhastighed
- hastighed
- Gaspedal / bremsepedal / koblingspedal position
- betændelse
- injektion
- Variabel ventiltiming
- Variabel indsugningsmanifold
- Dynamo kontrol (DF-signal)
- Masse luftmåler signal
- Gashåndtag position
- EGR ventil position
- Krumtap / knastaksel position
- Temperaturstyring via den kortstyrede termostat
- Ping kontrol
- Lambda kontrol
- Elektronisk kølevæskepumpe
- Tank udluftning
- Brændstofpumpe (booster og højtryk)
- Fartpilot
- Krumtaphus ventilation varme
- Kontrol af oliestand
- Turbo tryk
- Indsugningsmanifoldtryk
- Energistyring (sensor for batteriladningsstatus)
- Kommunikation med gearkasse (bevarer motorkraften ved skift med automatgear)
- Selvdiagnose (inklusive til lagring af fejlkoder)
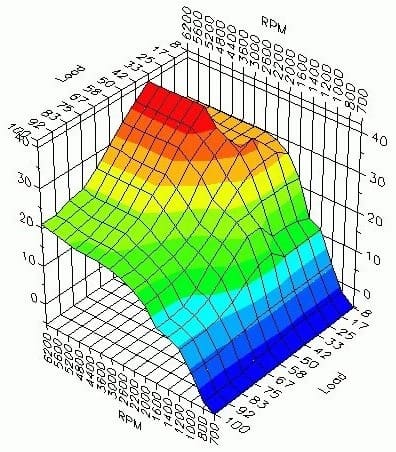
De indkommende signaler behandles alle i et karakteristisk felt (se billedet ovenfor). Kortet vil behandle inputsignalerne (fra sensorerne) baseret på blandt andet motorens omdrejningstal og belastning, udeluften, kølevæske, motorolie og udstødningsgastemperaturer. Disse data bruges til at bestemme, hvad outputtet vil være, dvs. hvordan en aktuator for eksempel vil blive styret. For eksempel, når motoren er kold, skal der indsprøjtes mere brændstof (koldstartberigelse) for at holde motoren kørende. Dette plejede at ske med den manuelle choker, men med motorstyringen styres det hele automatisk ved hjælp af VE og AFR tabeller. Disse tabeller repræsenterer fyldningsniveau og blandingsforhold.
Udetemperaturen og kølevæsketemperaturen måles, og når motoren kører, bestemmes tændingstidspunktet ved hjælp af bankesensorerne, og hastighedssensorerne bestemmer, om motoren kører jævnt. Gasventilen vil også blive styret mere "åben". Efter en vis tid vil temperaturen i forbrændingskammeret være høj nok til at skifte til normal indsprøjtning.
Når motoren er i opvarmningsfasen som netop beskrevet, kaldes dette "Open Loop". Feedbacken fra lambdasensoren tages så ikke i betragtning. Dette måler en alt for fed blanding (under koldstartberigelsen) og vil derfor faktisk ønske, at motoren kører slankere. Men fordi berigelsen er nødvendig, ignoreres dataene fra lambdasensoren. Når motoren har nået tilstrækkelig temperatur, vil de indgående signaler fra lambdasensoren blive brugt igen. Dette kaldes så "Closed Loop". Kort sagt: ECU'en bestemmer hvilke signaler der bruges eller ej.
De forskellige felter er vist på siden indsprøjtningssystem beskrevet.
Adaptiv hukommelse:
Motorstyringssoftwaren indeholder en såkaldt "adaptive learning memory". Aktuatorerne styres ud fra de data, der tidligere er modtaget fra sensorerne. Dette tager højde for noget slid og forurening af motoren. I tilfælde af slitage skal du for eksempel overveje et lavere kompressionssluttryk, som får tomgangshastigheden til at være lavere end ved en ny motor. Motorstyringssoftwaren skal reagere på dette ved at justere Brændstof Trims.
Den adaptive hukommelse gemmer blandt andet data vedrørende åbning og lukning af spjældventilen. Over tid bliver gasspjældet snavset på grund af påvirkningen fra EGR og krumtaphusventilationsdampe. Det er lidt sværere at åbne og lukke ventilen, og ventilen skal åbne lidt længere, hvis den er snavset, ellers vil kulresterne blokere luftvejen. Justeringen for en ældre motor vil derfor være anderledes end for en ny motor. Uden den adaptive hukommelse ville styringen skulle søge efter de rigtige værdier igen, hver gang motoren blev startet. Med den adaptive hukommelse tager motorstyringssoftwaren højde for dette.
Efter rengøring af f.eks. gasspjældsventilen eller EGR-ventilen, skal den ofte genlæres. Ved indlæring nulstilles den adaptive hukommelse. Efter indlæring vil motorledelsen igen kontrollere og gemme sensorernes værdier. Efter indlæring kan det ske, at motoren kører og ryster lidt uregelmæssigt.

Een lambda sensor bliver langsommere, som han bliver ældre. Dataene kommer ind i motorstyringen, men gennem den adaptive hukommelse tager motorstyringen hensyn til lambdasensorens ældning. Det er derfor vigtigt at slette tilpasningsværdierne, efter at lambdasonden er blevet udskiftet.
Automatgearet indeholder koblinger, der styres af olietrykket til at skifte gear. Ældre gearolie er ofte noget forurenet og tykkere end ny olie. Hastighederne og skiftepunkterne vil derfor være anderledes med ny olie end med gammel olie. Automatgearet indeholder desuden en styreenhed med adaptiv hukommelse, som har justeret skiftepunkterne så ideelt som muligt over tid. Efter at olien er blevet skiftet, kan skifteadfærden blive meget anderledes. Overvej forkerte hastigheder for at skifte til lavere eller højere gear, eller brat at skifte gear, hvilket forårsager et banke i drevet. Derfor skal gearkassens tilpasningsværdier også slettes efter olieskift.
Der skal ofte foretages et tilpasningsdrev, efter at tilpasningsværdierne er blevet slettet. Du skal så køre med forskellige hastigheder og hastigheder så meget som muligt, så systemet har mulighed for korrekt at beregne og gemme tilpasningsværdierne.
Oprindelsen af en fejlkode:
En sensor kan være defekt. Lednings- eller stikforbindelsen til sensoren kan også blive defekt, hvilket forstyrrer forbindelsen mellem sensoren og ECU. ECU'en modtager derfor forkerte værdier fra sensoren. Tidligere kunne dette påvirke motorens funktion; en defekt temperaturføler kan få alt for meget brændstof til at blive indsprøjtet og motoren "oversvømmet". Denne chance er meget mindre i disse dage. Motorledelsen kan genkende, at værdien af sensoren er forkert.
I dette eksempel er spændingsprofilen af a temperatur måler vist. Temperaturen arbejder med spændinger mellem 0,5 og 4,5 volt. Spændinger lavere end 0,5 volt og højere end 4,5 volt er i det forbudte område. Spændingerne kan ses i grafen nedenfor. Hvis sensoren er defekt, eller et kabel har en kortslutning med jord, overføres en spænding på 0 volt. Dette er i det forbudte område. ECU'en genkender dette og gemmer en fejlkode.
Ikke kun er fejlkoden gemt, men signalet bruges heller ikke. ECU'en skifter til en nødsituation; en erstatningsværdi beregnes ud fra andre data modtaget af ECU. Genanskaffelsesværdien er tæt på den faktiske værdi, så du kan fortsætte med at køre til garagen. Det er selvfølgelig ikke hensigten at ignorere fejlen, for eksempelvis brændstofforbruget kan stige markant.
Justering af softwaren:
Softwaren i ECU'en kan justeres med passende udstyr. Og selvfølgelig viden, for forkert programmering kan give alvorlige motorfejl. Omskrivning af softwaren kan ske ved en softwareopdatering fra producenten (ved at rette fejl opdaget efterfølgende) eller ved at tune. Det betyder, at der opnås højere effekt ved at justere det karakteristiske felt i ECU'en. På siden chip tuning der er mere information om dette.