emner:
- introduktion
- Diagnose CAN bus signaler lav / medium hastighed
- Diagnose CAN-bus signalerer høj hastighed
- Diagnose med multimeter
Forord:
Hvis der er mistanke om, at der er en fejl i CAN-bussen, kan der stilles en diagnose ved blandt andet at måle spændingsniveauerne på ledningerne.
Indholdet af CAN-bus-meddelelsen er i første omgang ikke vigtigt. Vi kan udføre målinger på CAN bus ledningerne med både multimeter og oscilloskop. Målingerne med multimeteret har en begrænsning; ved måling af spændingerne angives kun en gennemsnitsværdi. Multimeteret er tilstrækkeligt i begrænset omfang ved måling af en afbrydelse eller kortslutning. Oscilloskopet er nødvendigt for at måle spændingsniveauerne og vurdere, om signalet har en ren vej.
Hvordan et CAN-bussystem fungerer, og hvordan beskederne er opbygget, er forklaret på siden CAN bus. Denne side fokuserer på måling af CAN-bussen med oscilloskop og multimeter og mulige fejlfunktioner og årsager er beskrevet.
Diagnose CAN-bus-signaler lav / medium hastighed:
Med et to-kanals oscilloskop kan CAN-høj og CAN-lav måles samtidigt i forhold til jord. De to scope-billeder nedenfor viser CAN-bussignalet fra komfortbussen. Dette kaldes også "lav hastighed" eller "medium hastighed". Dette netværk finder vi ofte i komfortelektronikken, for eksempel dørelektronikken, BCM, klimaanlægget og instrumentpanelet. Spændingerne er som følger:
- CAN-lav: i hvile 0 volt, aktiv 4 volt;
- CAN-høj: tomgang 5 volt, aktiv 1 volt.
Når vi sætter nullinjerne for begge målekanaler til samme højde af Y-akserne, smelter signalerne sammen. Det er derfor tilrådeligt at flytte Y-aksen på CAN-low opad for aflæsning. På det andet billede nedenfor har nullinjerne ændret højde, så spændingsprofilen for CAN høj og lav kan sammenlignes korrekt.
Bemærk venligst: lav- og mellemhastigheds CAN-netværk er ofte ikke udstyret med terminerende modstande, i modsætning til højhastigheds CAN-netværket. Målingerne på en fejl er derfor også forskellige. Dette afsnit viser de mulige forstyrrelser af lav- og mellemhastighedsnetværket, og det næste afsnit viser højhastighedsnetværket.


CAN-høj kortsluttet til jord:
I CAN-højen er der en jordkort. Hvis isoleringen er beskadiget, kan ledningerne komme i kontakt med karrosseriet, eller i en ECU laves en kortslutning til jord.
I nedenstående måling ser vi en konstant spændingslinje på kanal B, der er 0 volt.
CAN-lav kortsluttet til jord:
Der er jordkort i CAN-low. Hvis isoleringen er beskadiget, kan ledningerne komme i kontakt med karrosseriet, eller i en ECU laves en kortslutning til jord.
I nedenstående måling ser vi en konstant spændingslinje på kanal A, der er 0 volt.
CAN-høj kortsluttet til plus:
I CAN-højden er der en positiv lukning. Hvis isoleringen af flere ledninger i et ledningsnet er beskadiget, kan ledningerne komme i kontakt med hinanden, eller i en ECU laves en kortslutning med positiv.
I de to målinger nedenfor ser vi:
- Kanaloverskridelse: Spændingsområdet for kanal B (rød) skal øges;
- På kanal B ser vi (i 20 V-området) en konstant spændingslinje, der er lig med batterispændingen.


CAN-lav kortsluttet til plus:
CAN-low har et positivt kredsløb. Hvis isoleringen af flere ledninger i et ledningsnet er beskadiget, kan ledningerne komme i kontakt med hinanden, eller i en ECU laves en kortslutning med positiv.
I de to målinger nedenfor ser vi:
- Kanaloverskridelse: spændingsområdet for kanal A (blå) skal øges;
- På kanal A ser vi (i 20 V-området) en konstant spændingslinje, der er lig med batterispændingen.


CAN-høj kortsluttet med CAN-lav:
CAN-lav ændres til spændingsprofilen for CAN-høj, når de forbindes til hinanden. Der kan opstå en kortslutning mellem CAN-høj og CAN-lav i ledningerne, hvor isoleringen af begge CAN-bus-ledninger er slidt igennem, eller på grund af en defekt i printpladen på en ECU.
På billedet nedenfor ser vi to-kanals måling, hvor CAN høj og lav er kortsluttet med hinanden.
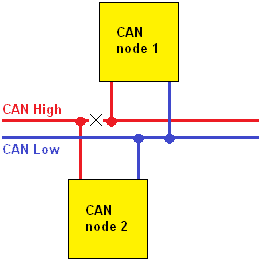
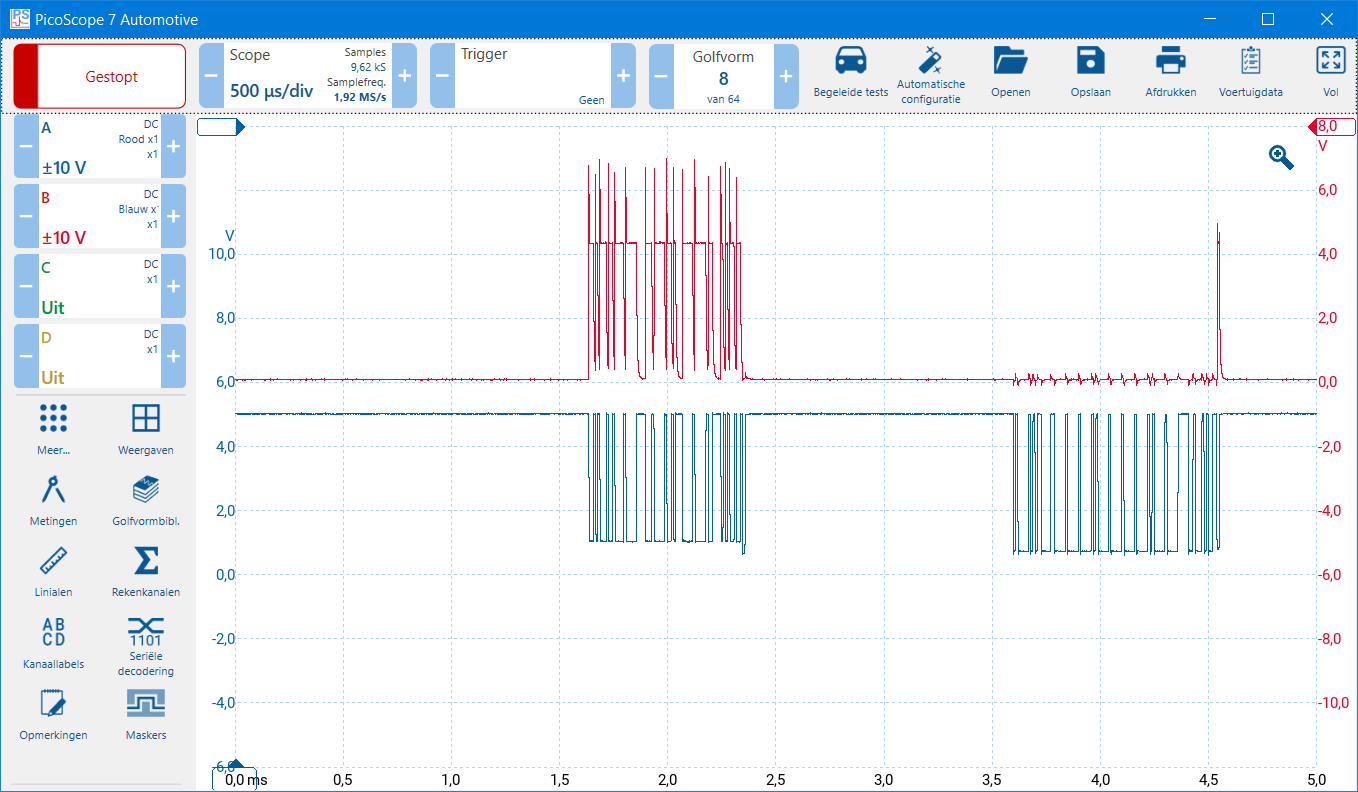
På CAN-høj kommunikation falder lejlighedsvis:
Kommunikationen med én styreenhed i CAN high afbrydes. Denne styreenhed sender og modtager ikke længere data via CAN-høj, men CAN-lav fungerer stadig. Det betyder, at kommunikation og læsning fortsat er mulig.
Når stikket til den relevante styreenhed frakobles, forsvinder CAN-lav-dataene også, og forskellen mellem CAN-høj og CAN-lav er ikke længere synlig.
På billedet nedenfor ser vi, at CAN-højen forbliver forsænket på et punkt, mens data sendes på CAN-laven.
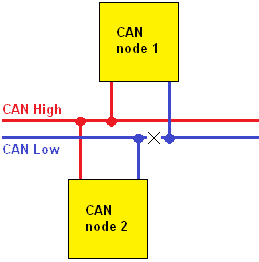
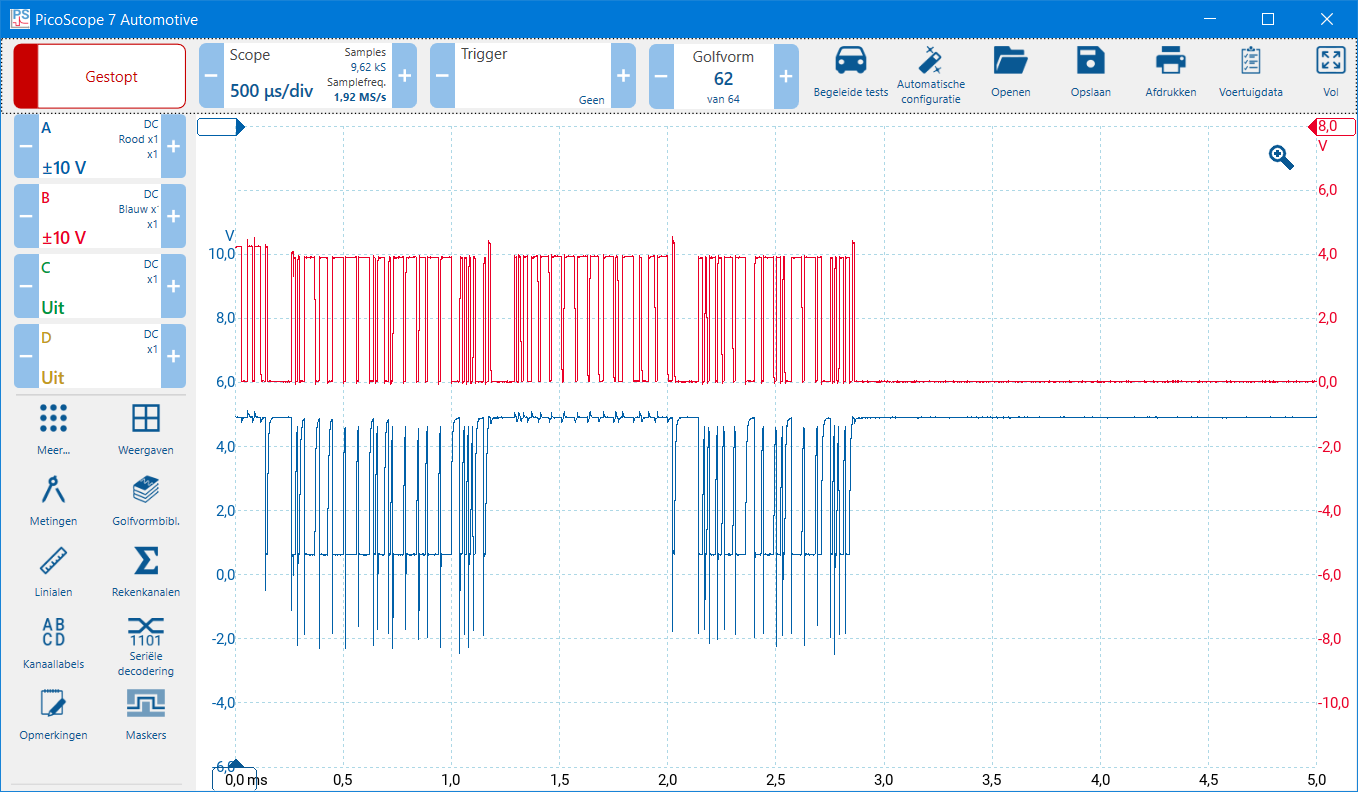
På CAN-low falder kommunikationen lejlighedsvis:
Kommunikationen med én styreenhed i CAN-low er afbrudt. Denne styreenhed sender og modtager ikke længere data via CAN-low, men CAN-high fungerer stadig. Det betyder, at kommunikation og læsning fortsat er mulig.
Når stikket til den relevante styreenhed frakobles, forsvinder CAN-høj-dataene også, og forskellen mellem CAN-høj og CAN-lav er ikke længere synlig.
På billedet nedenfor ser vi, at CAN-low forbliver recessiv på et punkt, mens data sendes på CAN-høj.
Diagnose CAN-bus signalerer høj hastighed:
ECU'erne, for hvilke en høj kommunikationshastighed er af stor betydning, er udstyret med et højhastigheds CAN-netværk. Dette inkluderer for eksempel forbrændingsmotorens ECU, automatgear, ABS/ESP/EBS og airbaggene. Et højhastighedsnetværk er altid udstyret med afslutningsmodstande. Fejl i ledninger og ECU'er forårsager derfor også en anden spændingsprofil, som nogle gange kan gøre det sværere at diagnosticere end med et komfortnetværk. Som altid vises en problemfri situation først, før vi fortsætter til fejl.
Spændingerne i et højhastighedsnetværk er som følger:
- CAN-høj: tomgang 2,5 volt, aktiv 3,5;
- CAN-lav: tomgang 2,5 volt, aktiv 1,5 volt.
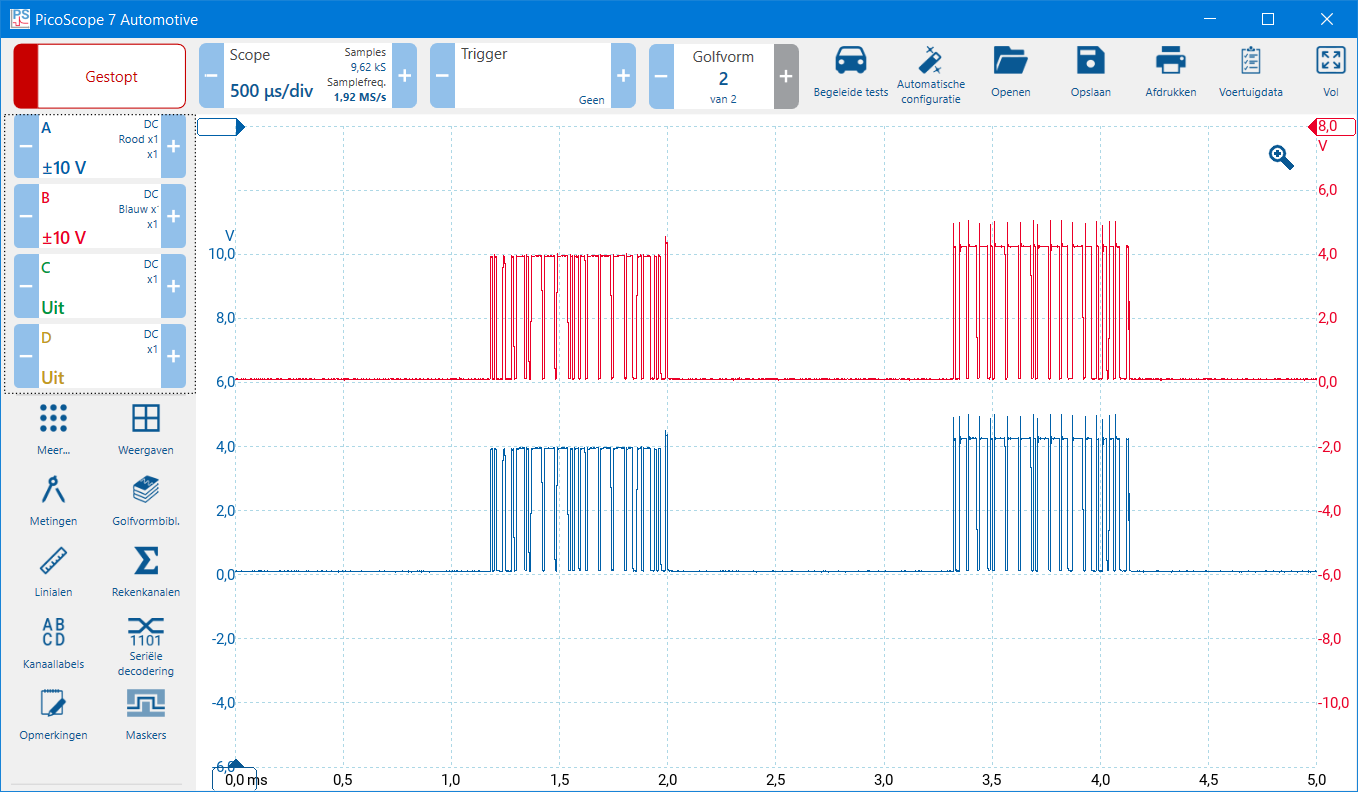
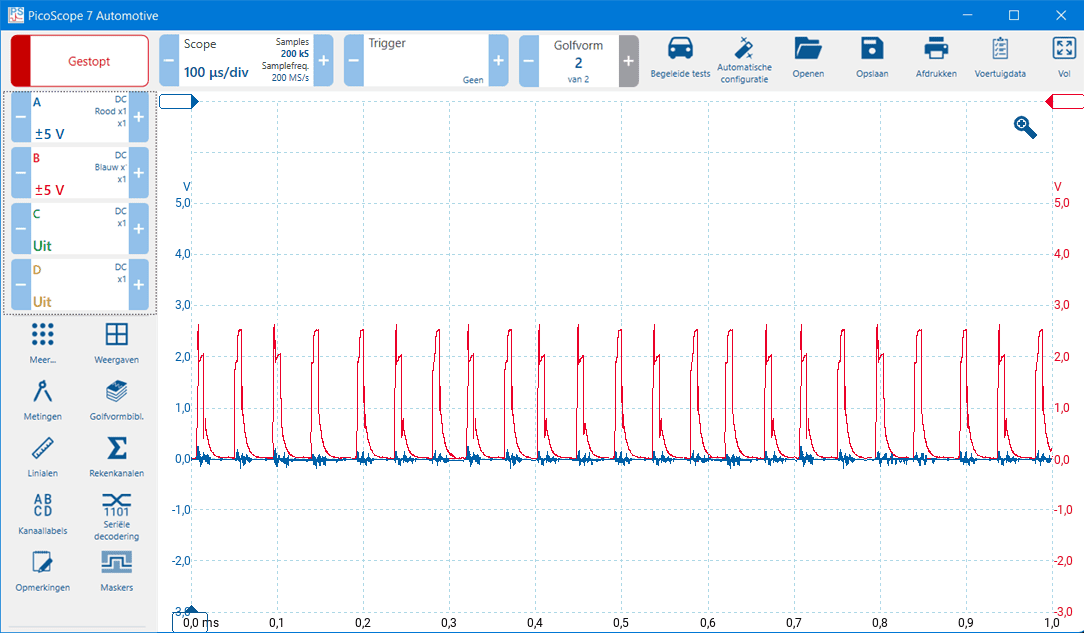
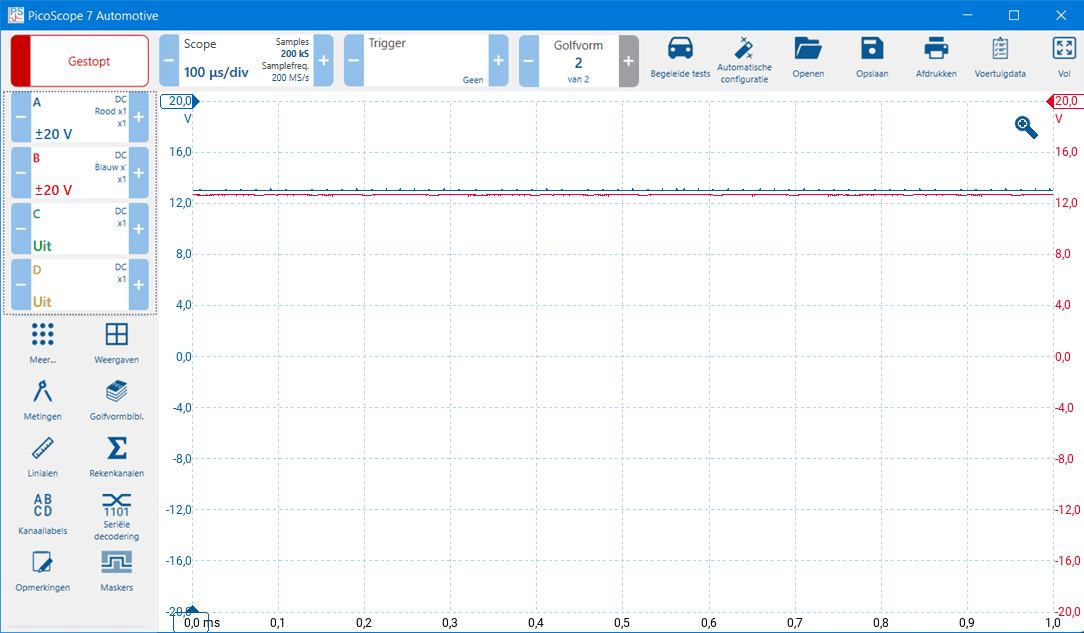
Når CAN høj og lav begge er 2,5 volt, er bussen recessiv (i hvile). Når CAN-højen stiger og CAN-laven falder, bliver bussen dominerende og der dannes en smule. Billedet nedenfor viser et skærmbillede af et korrekt højhastigheds CAN-bussignal.
Når et sådant signal måles og meget støj er synlig, er det tilrådeligt at fjerne batteriopladeren fra køretøjet og forbinde oscilloskopet til køretøjets jord (Automotive scopes har en "jord"-forbindelse på bagsiden) og signalet kan gøres renere med samplefrekvensen. Samplingshastigheden udjævner signalet, så hvis det afviger for langt fra standardværdien, kan CAN-signalet forvrænges for meget.
For klarhedens skyld er CAN-høj på billedet nedenfor rød og CAN-lav er blå.
CAN-høj kortsluttet til jord:
I CAN-højen er der en jordkort. Hvis isoleringen er beskadiget, kan ledningerne komme i kontakt med karrosseriet, eller i en ECU laves en kortslutning til jord.
I nedenstående måling kan du se, at CAN-høj (rød) er præcis 0 volt, fordi den har en kortslutning til jord. CAN-lav (blå) er lidt over nullinjen. Når man zoomer ind på dette signal, vil dette blive endnu tydeligere. Fordi CAN-høj er præcis 0 volt og CAN-lav er et par tiendedele volt højere, kan vi konkludere, at CAN-høj har en kortslutning med jord.
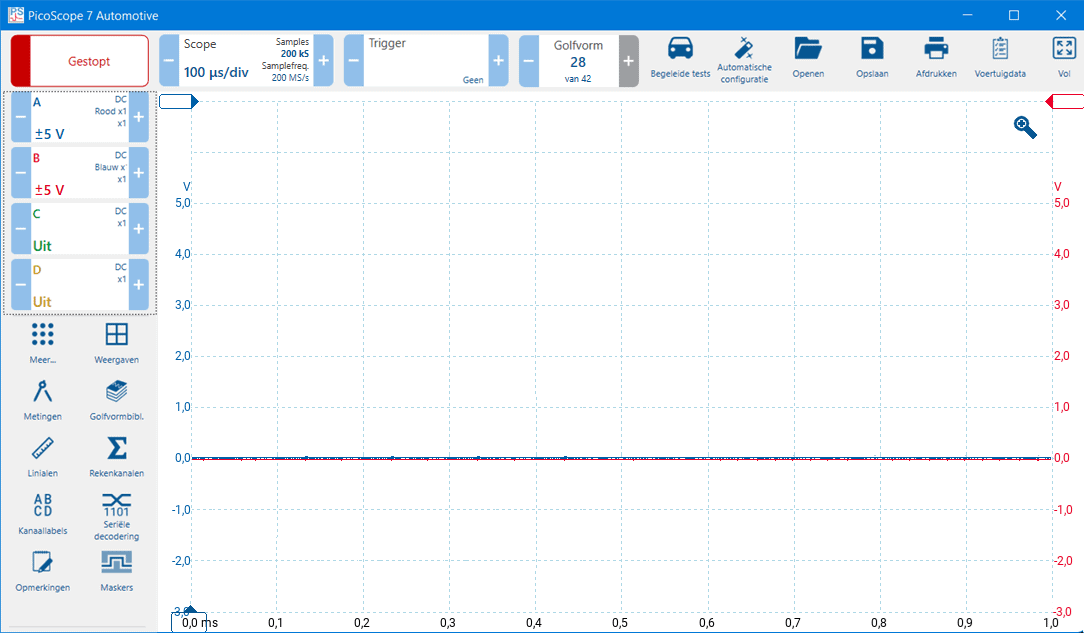
CAN-lav kortsluttet til jord:
Der er jordkort i CAN-low. Hvis isoleringen er beskadiget, kan ledningerne komme i kontakt med karrosseriet, eller i en ECU laves en kortslutning til jord.
I nedenstående måling ser vi, at CAN-low er 0 volt. Selvom der er synlig støj, kan vi ignorere det. CAN-low er kortsluttet til jord. Vi ser CAN-højspændingslinjen blive ved med at stige, men det er ikke nok til at starte kommunikationen. Scopebilledet viser også, at CAN-low altid er en lavere spænding end CAN-høj (rød er altid lidt højere end blå), hvilket betyder, at vi kan antage, at CAN-low er kortsluttet til jord.
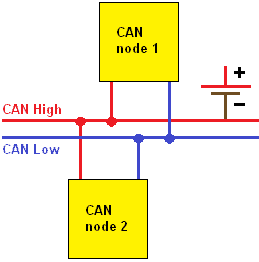
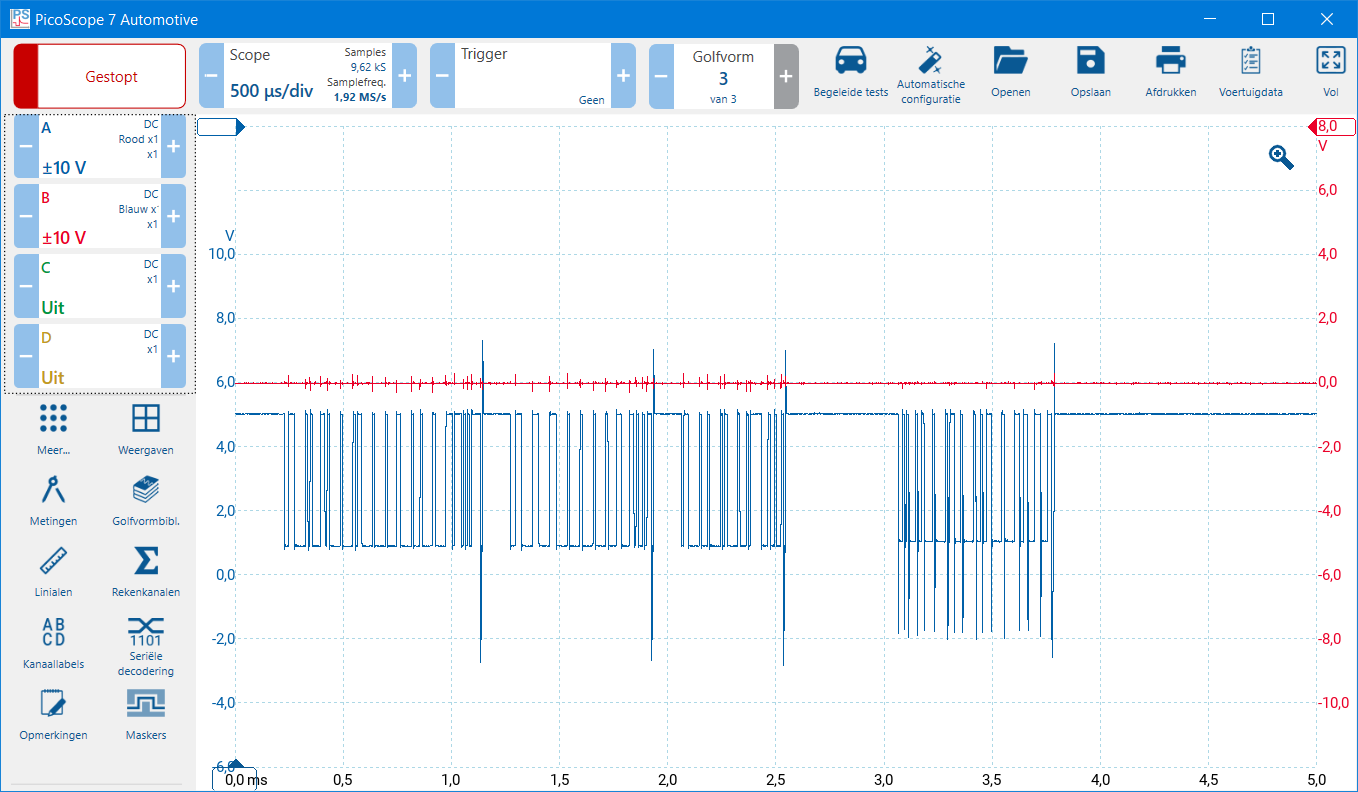
CAN-høj kortsluttet til plus:
I CAN-højden er der en positiv lukning. Hvis isoleringen af flere ledninger i et ledningsnet er beskadiget, kan ledningerne komme i kontakt med hinanden, eller i en ECU laves en kortslutning med positiv.
På billedet nedenfor ser vi et fænomen, der ligner situationen, hvor CAN-low blev kortsluttet til jord. CAN-høj (rød) er steget til den indbyggede spænding på omkring 12 volt. CAN-low (blå) er også steget i spænding og forsøger stadig at kommunikere ved at sænke signalet. Fordi der ikke etableres kommunikation, fortsætter de negative spændingstoppe med at gentage sig.
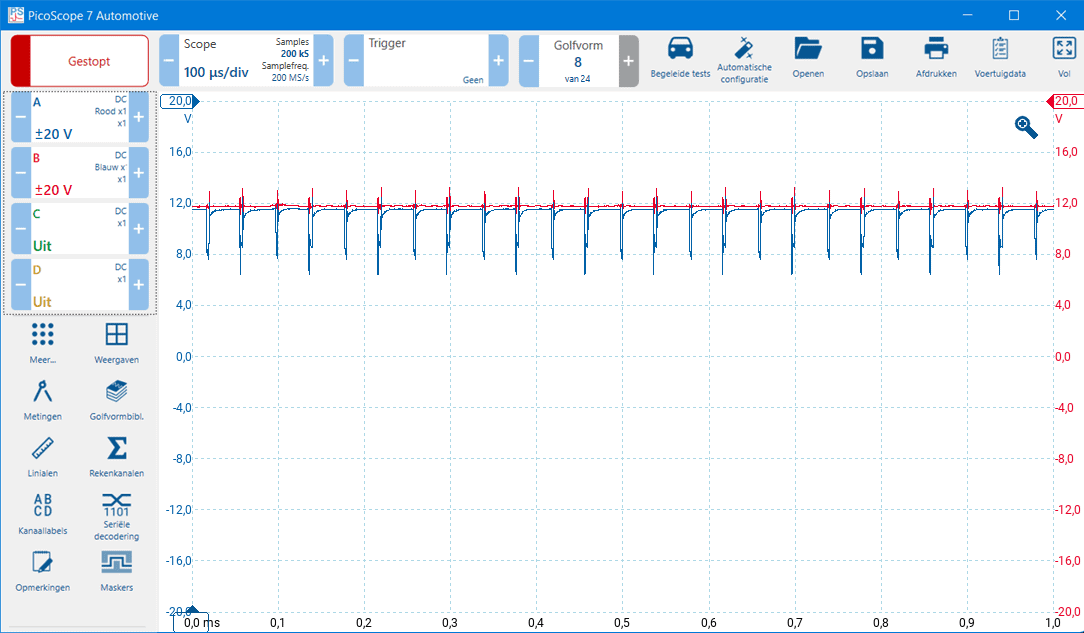
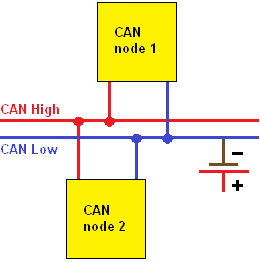
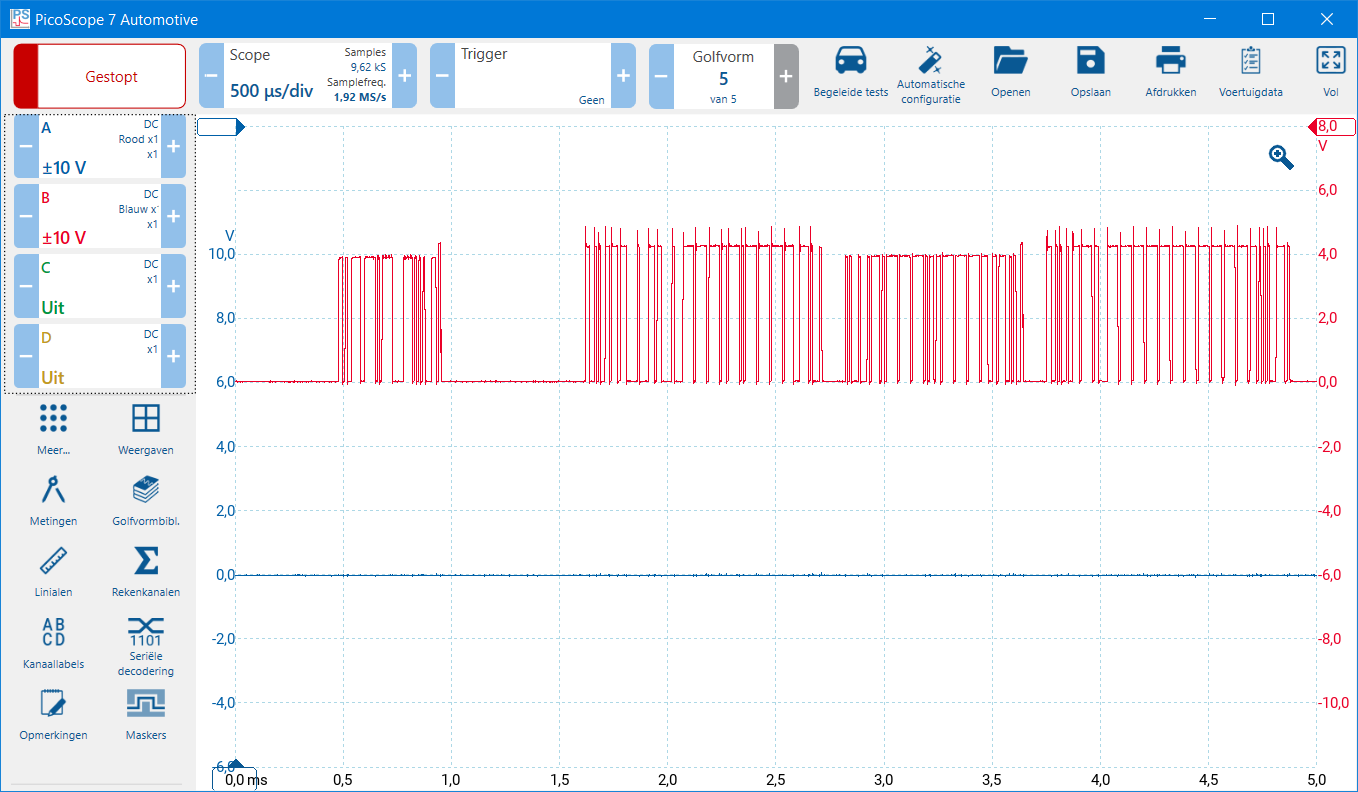
CAN-lav kortsluttet til plus:
CAN-low har et positivt kredsløb. Hvis isoleringen af flere ledninger i et ledningsnet er beskadiget, kan ledningerne komme i kontakt med hinanden, eller i en ECU laves en kortslutning med positiv.
I nedenstående måling ser vi, at CAN-høj og CAN-lav er omkring 12 volt. Spændingen på CAN-low er dog omkring 200 mV højere end CAN-høj. CAN-low har løftet CAN-højt sammen med det. Dette viser, at CAN-low er kortsluttet med plus.
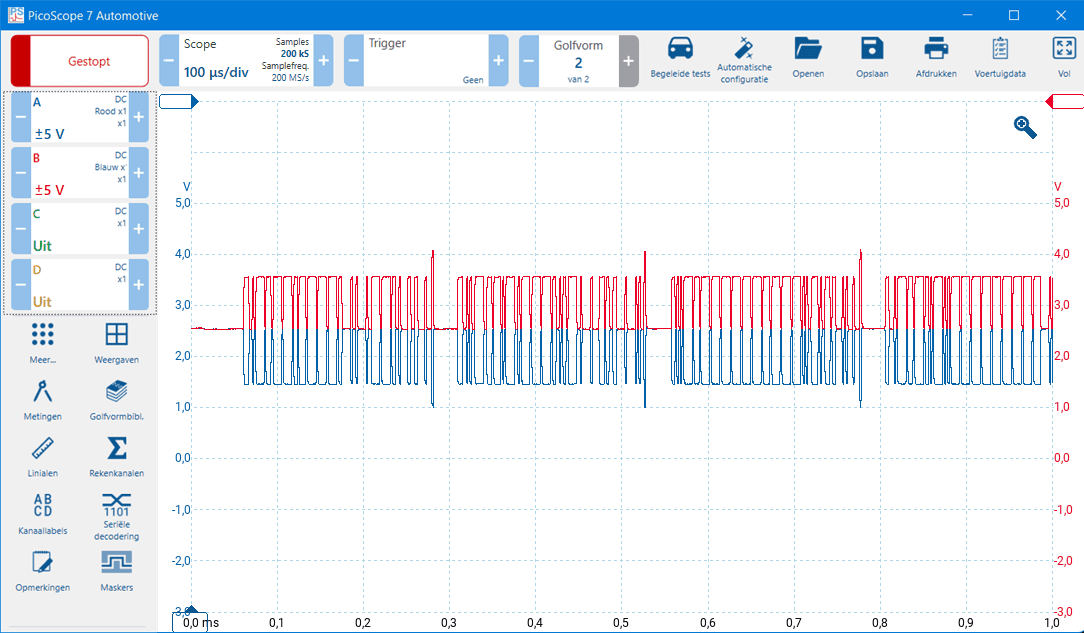
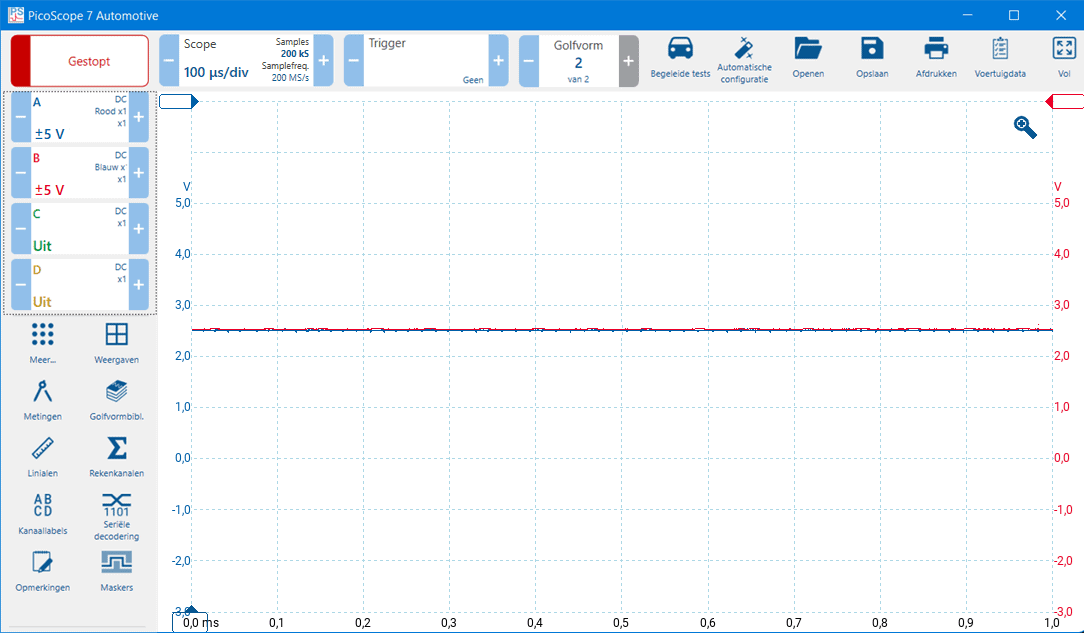
CAN-høj kortsluttet med CAN-lav:
CAN-lav ændres til spændingsprofilen for CAN-høj, når de forbindes til hinanden. Der kan opstå en kortslutning mellem CAN-høj og CAN-lav i ledningerne, hvor isoleringen af begge CAN-bus-ledninger er slidt igennem, eller på grund af en defekt i printpladen på en ECU.
På billedet nedenfor ser vi to-kanals måling, hvor CAN-høj og CAN-lav er kortsluttet med hinanden. Spændingen på begge kanaler er 2,5 volt.
Diagnose med multimeter:
Det er uklogt at måle CAN-busspændingsniveauer med multimeteret. Multimeteret viser gennemsnitsværdier ved mange varierende spændinger, så en korrekt diagnose ikke kan stilles. Oscilloskopet skal bruges til at måle spændingerne.
Vi kan bruge multimeteret til at måle modstandene i (kun) et højhastigheds CAN-netværk med afslutningsmodstande. Målingerne nedenfor viser den ohmske modstand i tre forskellige situationer: et korrekt fungerende system, en åben ledning og en kortslutning mellem CAN-høj og CAN-lav. I et lavt/medium (komfort) netværk bruges der sjældent termineringsmodstande, og disse målinger kan ikke udføres.
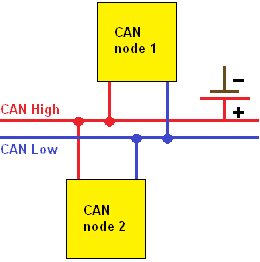
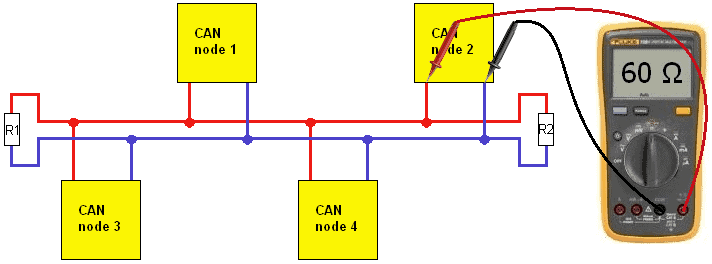
Interferensfri:
Pagina op CAN bus det er beskrevet, at der er to afslutningsmodstande i netværket. Afslutningsmodstandene har begge en modstand på 120 ohm. I et problemfrit system vil vi måle en udskiftningsmodstand på 60 ohm mellem CAN-høj og CAN-lav.
Bemærk venligst: vi kan kun måle dette, hvis strømforsyningen til alle styreenheder er afbrudt!
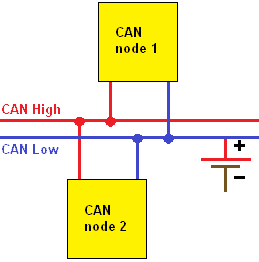
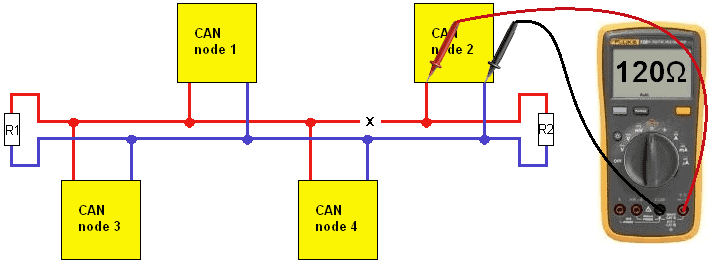
Afbrydelse:
I tilfælde af afbrydelse i en CAN-høj eller CAN-lav ledning måler vi ikke længere udskiftningsmodstanden på 60 ohm. På figuren måler vi kun værdien af modstand R2 (120 ohm).
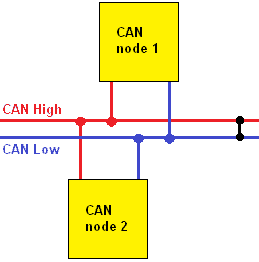
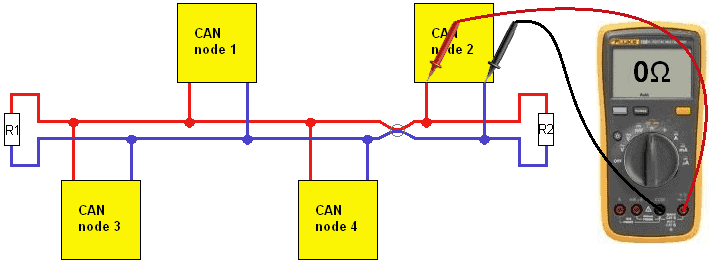
Kortslutning:
I den situation, hvor CAN-bus-ledningerne forbindes med hinanden (dvs. er kortsluttede til hinanden), måler vi en modstandsværdi på cirka 0 ohm.
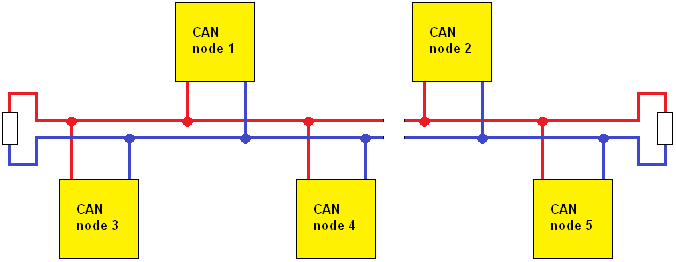
Under den næste fejl afbrydes begge CAN-ledninger. Der vil nu være en del forstyrrelser (støj) på bussen. Noderne 1, 3 og 4 kan kommunikere med hinanden, forudsat at interferensen og refleksionen er for stor, hvilket forårsager, at meddelelserne forvrænges. Knudepunkter 2 og 5 kan således også kommunikere med hinanden med det samme problem.
Nogle CAN-netværk fungerer også, når en ledning er afbrudt. Fejlkoder vil blive gemt, og chaufføren vil blive informeret med advarselslamper ved beskeder fra forskellige systemer. Det er de netværk, der er udstyret med en Fault Tolerante CAN transceiver. Afhængigt af den anvendte transceiver kan der opstå forskellige typer fejl uden at miste kommunikationen mellem knudepunkterne. Disse CAN transceivere kan også fungere normalt med førnævnte fejl med kortslutninger til plus og jord (selvfølgelig med diverse fejlmeldinger).
Relateret side: