Konvertering af analoge sensorspændinger til digital besked
Konvertering af impulsgeneratorsignal til digital besked
Udgangssignaler
Forord: I de fleste tilfælde skal de elektriske signaler fra sensorerne justeres, før de præsenteres for processoren. Aktuatorerne styres på den anden side af computeren. Disse er ofte induktive kredsløb, der ofte skifter store strømme. Hardwaren til at justere sensorsignalerne og aktuatorstrømmene kaldes grænsefladekredsløb. Et interfacekredsløb sikrer oversættelsen af en analog til en digital spænding.
sensorer overføre en spænding med lav strøm. Interfacekredsløbet konverterer spændingen til en digital værdi (0 eller 1). Strømintensiteten er lav med et sensorsignal;
Aktuatorer kræver højere strøm. Til styre aktuatorer, er placeret i ECU'en i form af (en kombination af) transistorer eller FET'er, som også kaldes "drivere". Vi vil diskutere dette mere detaljeret i afsnittet "outputsignaler".
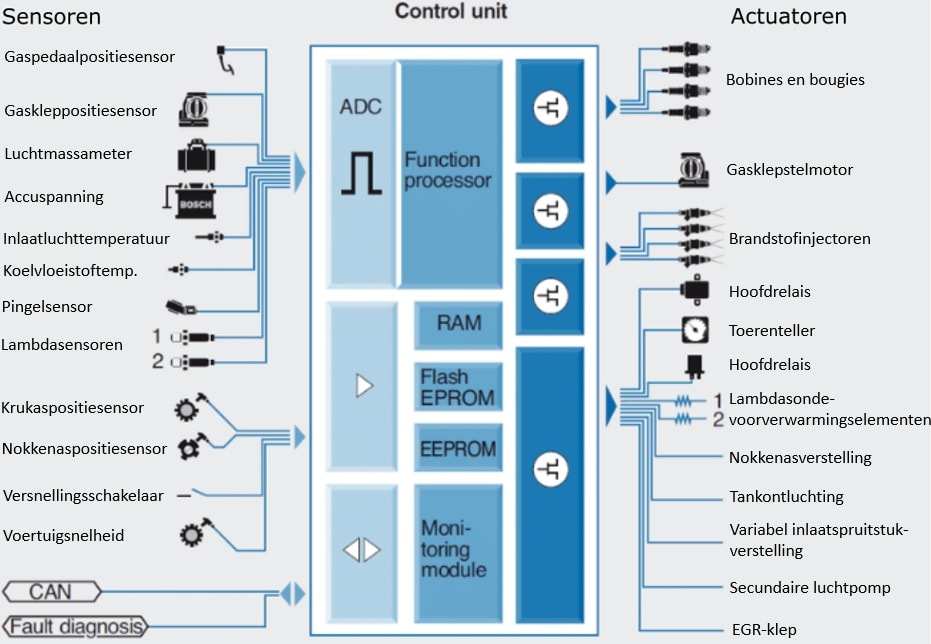
Billedet nedenfor viser sensorerne og aktuatorerne i et (benzin)motorstyringssystem. Den øverste gruppe af sensorer (fra gaspedalpositionssensoren til lambdasensorerne) falder ind under kategorien "analog". Det betyder, at de indgående sensorspændinger først skal digitaliseres i ADC'en (analog – digital konverter). Den nederste gruppe af sensorer (krumtapakselpositionssensoren til køretøjets hastighedssensor) giver allerede deres signal digitalt. On-off-signalerne eller blokspændingerne tilføres direkte til CPU'en.
Aktuatorerne til højre styres af et udgangstrin. Et udgangstrin, også kaldet en driver, består af et kredsløb af flere transistorer til at generere en brugbar spænding og strøm fra en styreimpuls fra computeren til at styre aktuatoren.
Motorstyringssystem med sensorer (venstre) og aktuatorer (højre)
Transistor Transistor Logic (TTL): Processoren arbejder med spændinger på 5 volt. Indgangs- og udgangsspændinger er derfor begrænset til et område på 0 til 5 volt (TTL-niveau, forkortet fra Transistor Transistor Logic). For signaler, der afviger fra dette spændingsniveau, sker en justering i et interfacekredsløb.
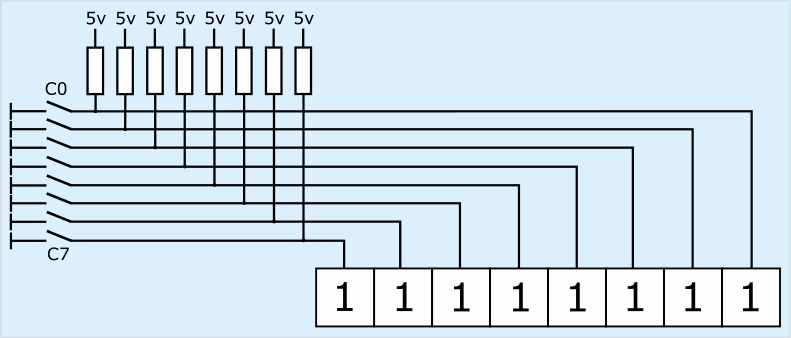
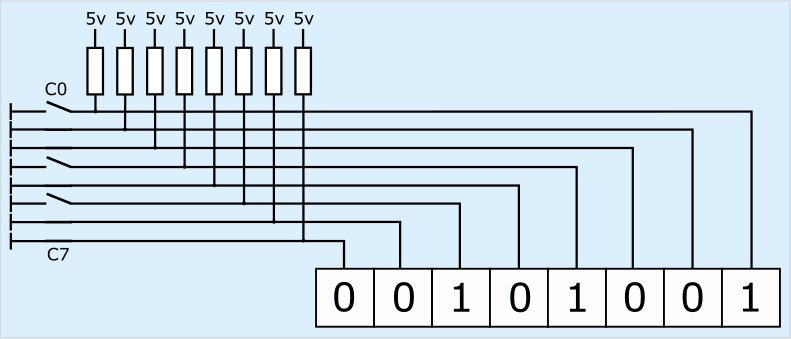
Billederne nedenfor viser, hvordan et 1 eller et 0 dannes fra en kontaktposition. Ved hjælp af en pull-up modstand giver spændingen på 5 volt en logisk 1 på processorens indgang, når kontakten åbnes. Spændingen over pull-up modstanden er så ikke forbundet til jord. Når kontakterne lukker, opstår der et spændingsfald over pull-up modstanden. Spændingen på 0 volt ved indgangen til processoren ses som logisk 0.
Alle kontakter åbne: 11111111 på processorindgang
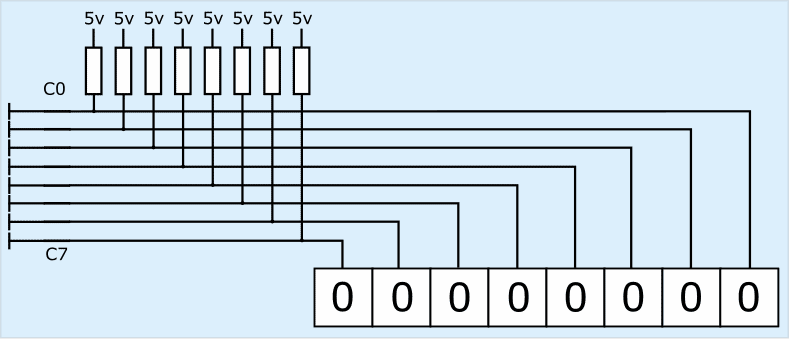
Alle kontakter lukket: 00000000 på processorindgang
En kombination af åbne og lukkede kontakter frembringer en række etere og nuller. I figuren er 8-bit beskeden til processoren: 00101001.
Med en 8-bit processor læses de otte bits samtidigt pr. cyklus. Under den næste cyklus, som finder sted under det næste "tick" af uret (se systembus på siden om betjeningen af ECU) følger en sekvens med otte nye bits.
Åbnede og lukkede kontakter: 00101001 på processorindgang
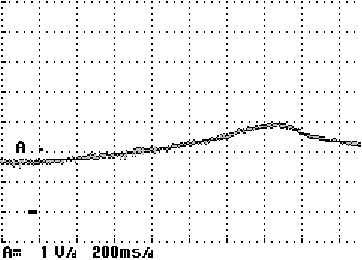
Konvertering af analoge sensorspændinger til digital meddelelse: Digitale indgangssignaler behandles direkte af processoren. Analoge signaler konverteres først til et digitalt signal i A/D-konverteren. Som et eksempel tager vi den analoge spændingskurve for en turbotryksensor:
ved tomgang er spændingen ca. 1,8 volt;
ved acceleration stiger spændingen til næsten 3 volt.
Spændingsændringen kan ikke behandles direkte i processoren. Først skal den målte spænding konverteres til en decimalværdi (0 til 255).
Med et område fra 0 til 5 volt og en decimalværdi fra 0 til 255 (altså 256 muligheder). En simpel beregning viser, at hvis vi deler 5 volt over 256 muligheder, kan der laves trin på 19,5 mV (0,0195 volt).
Ovenstående eksempel viste spændingsudviklingen i forhold til tiden for en turbotryksensor. Spændingskurven for en temperatursensor og gaspedalpositionssensor er den samme, kun i en anden tidsramme: Opvarmning af kølevæsken tager længere tid end at spolere turboen op.
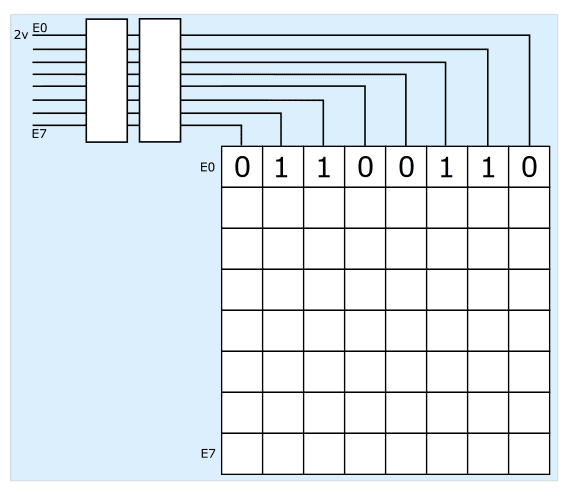
Tidligere i dette afsnit er der et billede, der viser en kategori af analoge signaler. Dette viser blandt andet temperatursensor og gaspedalpositionssensor. Den analoge spænding konverteres til en 8-bit informationsenhed i A/D-konverteren. Mange processorer med flere inputben har kun én A/D-konverter. Flere analoge signaler kombineres til ét signal ved hjælp af multipleksing.
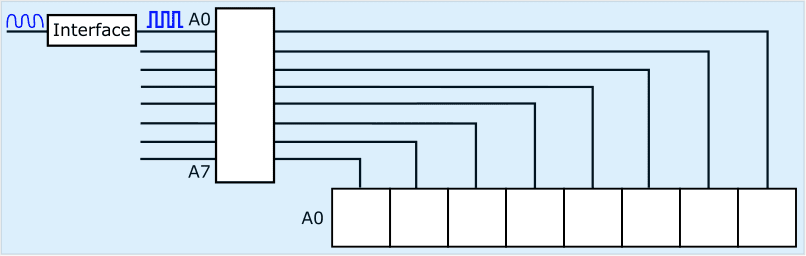
I dette eksempel ser vi en A/D-konverter med otte indgange. Der er en spænding på 0 volt på ben 2. Ben E1 til E7 kan forsynes med spændinger på samme tid. Disse konverteres én efter én til en digital besked ved hjælp af multipleksing.
2 volt spændingen konverteres til en binær værdi. Med følgende formel kan vi konvertere den analoge spænding til en decimalværdi og derefter konvertere den til en binær værdi:
2v / 5v * 255d = 102d
Her dividerer vi indgangsspændingen (2v) med den maksimale spænding (5v) og multiplicerer denne med den maksimale decimalværdi (255).
Ved at lave en udregning eller udføre et pænt trick, kan vi konvertere decimaltallet 255d til den binære værdi af 01100110. Se siden for dette: binær, decimal, hexadecimal.
8 bit A/D konverter
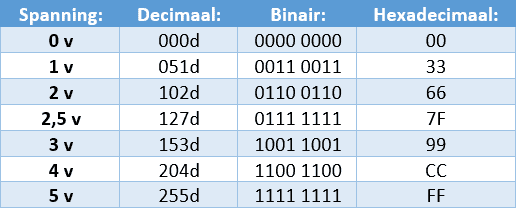
Følgende tabel viser de decimale, binære og hexadecimale værdier forbundet med forskellige spændinger.
Ved læsning af live-data kan sensorsignalets decimal-, binære eller hexadecimale værdi blive vist.
Et spændingssignal på <0,5 volt (025d) betragtes som en kortslutning til jord;
Hvis signalet stiger over 4,5 volt (220d), oversætter computeren dette som en kortslutning med positiv.
Spænding i decimale, binære og hexadecimale værdier
Konvertering af impulsgeneratorsignaler til en digital meddelelse: Signalerne fra impulsgeneratorer, inklusive den induktive krumtapakselpositionssensor, er faktisk on-off signaler, der opstår, efter at impulshjulets tænder har bevæget sig forbi sensoren. Sensorens vekselspænding skal først konverteres til en firkantbølgespænding, før signalet præsenteres for processoren.
På figuren ser vi en sinusformet vekselspænding på venstre side af grænsefladen. I grænsefladeelektronikken omdannes denne vekselspænding til en firkantbølgespænding. Denne blokspænding aflæses så af timeren/tællerblokken: når pulsen er høj, begynder tælleren at tælle, og stopper med at tælle, når pulsen bliver høj igen. Antallet af tællinger er et mål for periodetiden. signalets frekvens.
Konvertering af impulsgeneratorsignal til digitalt signal med timer/tællerblok
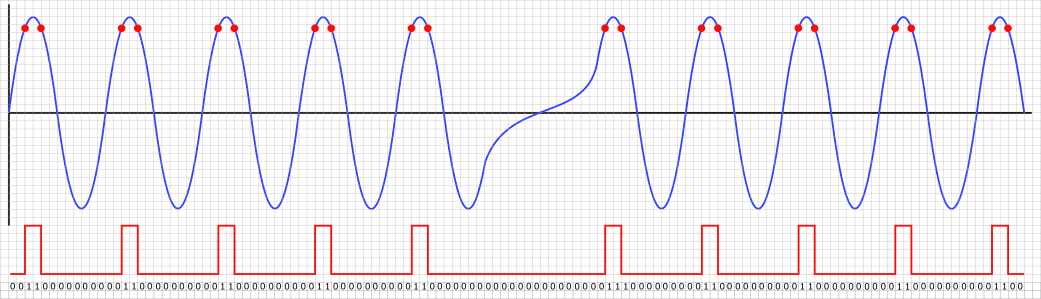
På billedet nedenfor ser vi et signal fra den induktive krumtapakselsensor med røde prikker i de øverste flanker. De røde punkter er sat til en spænding for at øge (logisk 1) eller mindske (logisk 0) blokspændingen. Forklaringen fortsætter under dette billede.
Sinusformet vekselspænding og et digitaliseret signal uden hysterese
Sensorspændingen er dog aldrig helt ren. Der vil altid være et lille udsving i spændingsprofilen. I så fald kan grænsefladeelektronikken fejlagtigt angive dette som et logisk 0, mens det faktisk burde være et 1.
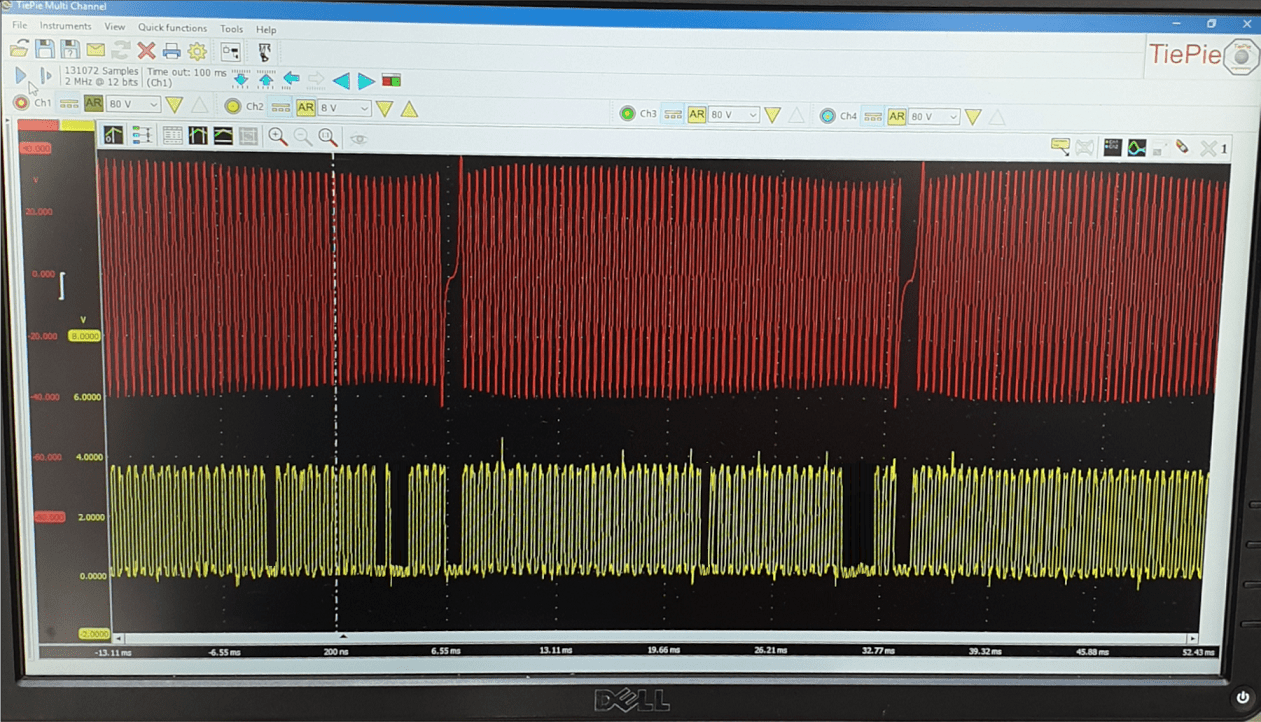
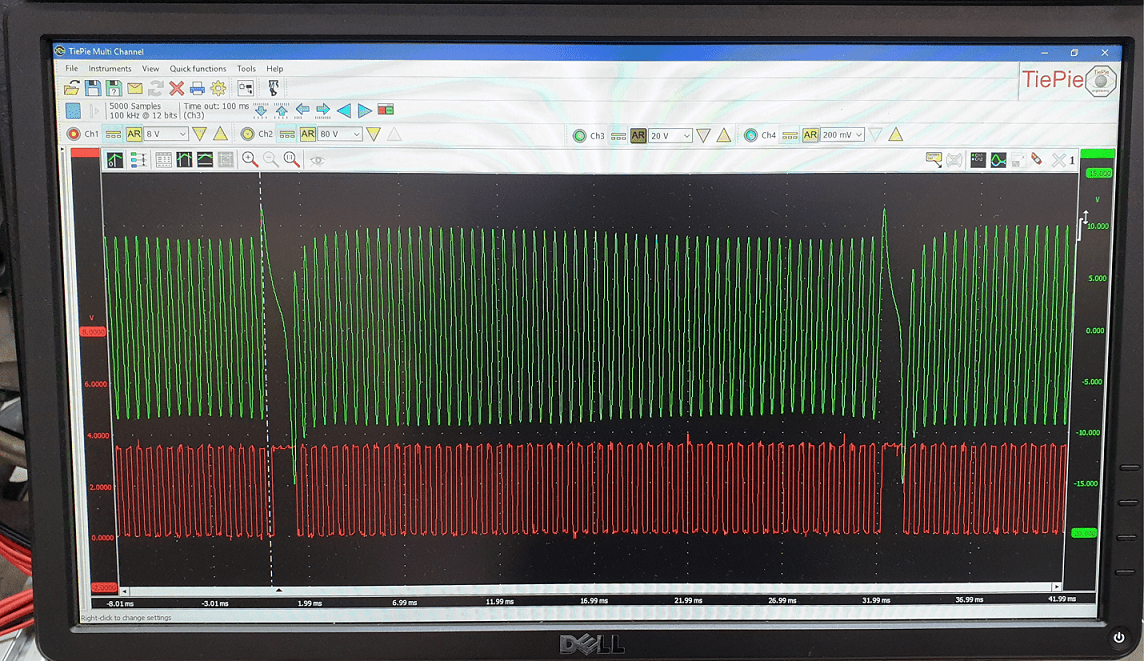
Scopebilledet nedenfor blev optaget, mens det kørte BMW Megasquirt projekt. Scopebilledet viser digitaliseringen (gul) af det induktive krumtapakselsignal (rødt). Billedet viser tydeligt, at der mangler impulser i det gule bloksignal, mens der i det øjeblik ikke passerer nogen manglende tand i krumtapakselsignalet.
Urent digitalt signal indeholder fejl: dette mangler information
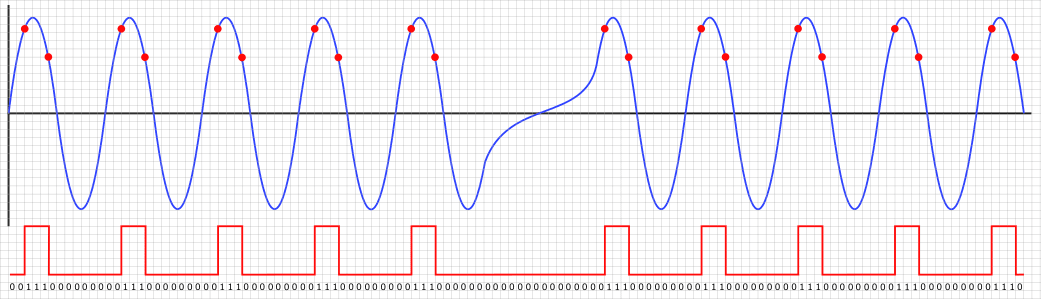
For at sikre at små udsving i spændingsprofilen ikke forårsager en forkert fortolkning af ECU'en, er der indbygget en såkaldt hysterese. Hysteresen er forskellen mellem de stigende og faldende kanter af spændingsprofilen. På billedet nedenfor ser vi, at de røde prikker på de stigende kanter har en højere spænding end de røde prikker på de faldende kanter. På denne måde kan vi være sikre på, at små udsving i signalet ikke påvirker den digitale konvertering.
I det første afsnit, hvor vi startede om konverteringen af pulssignalet til det digitale signal, blev det allerede nævnt, at frekvensen af signalet bestemmes ud fra tiden mellem to stigende flanker af kvadratsignalet. I disse eksempler kan det tydeligt udledes, at hysteresen har indflydelse på bredden af kvadratsignalet, men ikke har nogen indflydelse på tiden mellem de stigende kanter og derfor ikke har nogen indflydelse på frekvensen af signalet.
Digitaliseret pulsgeneratorsignal med hysterese
Med en korrekt indstillet hysterese konverteres det sinusformede signal korrekt til en brugbar firkantbølgespænding, med kun de flere logiske på de steder, hvor den manglende tand passerer.
Bemærk venligst, at under opsætningen af MegaSquirt ECU'en blev indstillingerne ændret, herunder udløsning på de stigende og faldende linjer. Som følge heraf er spændingen 0 volt, når man passerer den manglende tand i det første eksempel, og i scope-billedet under er spændingen 5 volt.
Pulsgeneratorsignal med ren og korrekt firkantbølgespænding
Udgangssignaler: Udgangssignalerne består af digitale tænd/sluk-impulser med et spændingsområde mellem 0 og 5 volt (TTL-niveau) med meget lav strøm. Aktuatorer kræver dog styring med højere spændingsniveauer og strømme. On/off-signalerne kan pulsbreddemoduleres (PWM), hvor pulsbredden kan variere med en konstant frekvens.
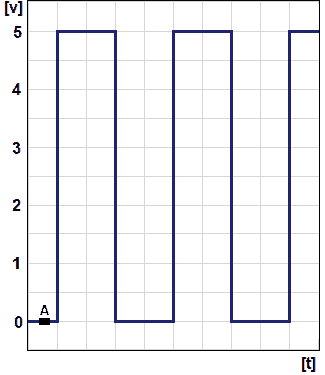
Den følgende figur viser en firkantbølgespænding på TTL-niveau som funktion af tiden. Det arbejdscyklus af dette PWM-signal er 50 %.
Drivere er nødvendige for at styre aktuatorer. Med det digitale udgangssignal kan den nødvendige strøm opnås med en driver. I næste afsnit vil vi diskutere driverne.
Eksempel: PWM-signal
Vi finder drivere i hver ECU og i nogle aktuatorer såsom DIS tændspoler. En driver kaldes også et udgangstrin eller effekttransistor. Driveren gør det muligt at konvertere udgangssignaler på TTL-niveau: 0 til 5 volt, med en lav strøm på 1 mA fra ECU'en til spændinger op til 14 volt og strømme op til ca. 10 A.
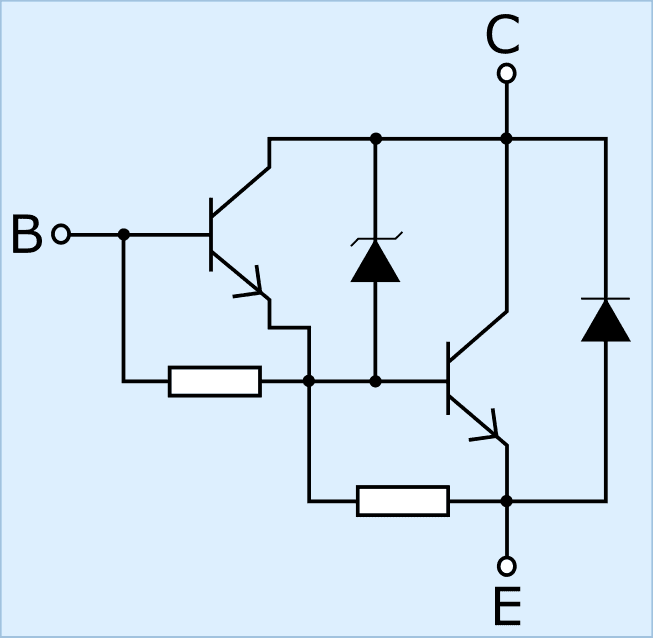
En chauffør kan forbinde flere transistorer indeholde. Vi kalder sådan en transistor en "Darlington transistor“. Følgende billeder viser følgende kredsløb:
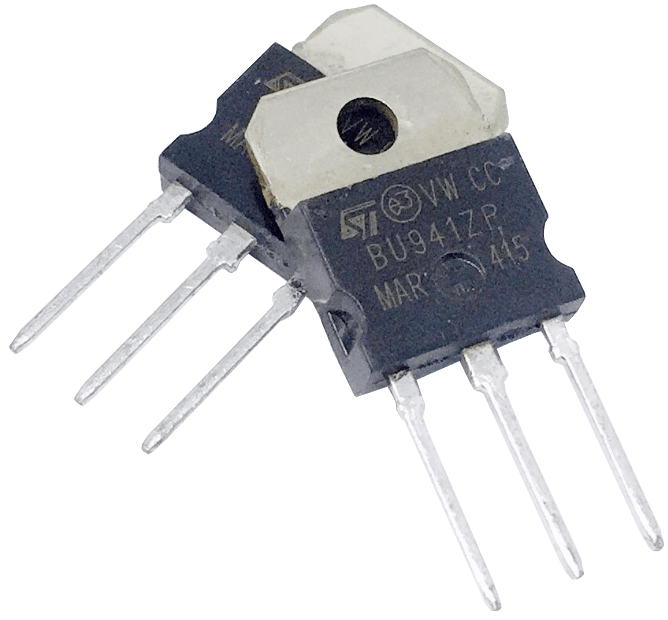
Skematisk af et Darlington-kredsløb med to transistorer til tændspolestyringen (kilde: datablad BU941ZR).
To transistorer, hver med et Darlington-kredsløb (BU941ZR)
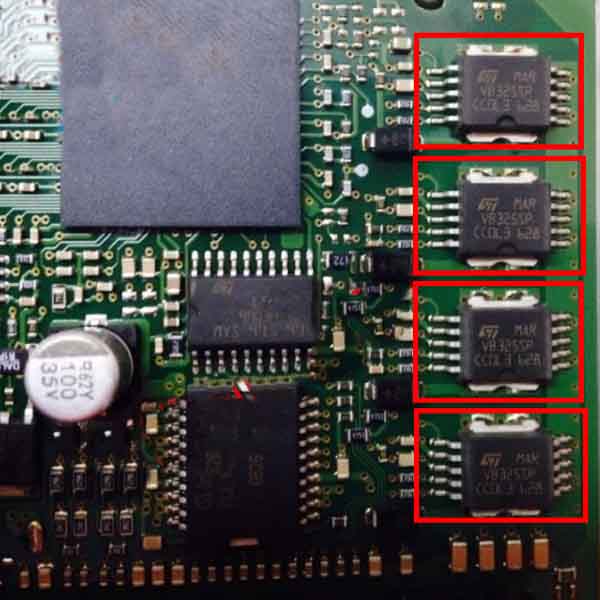
Driver IC'er med Darlington-kredsløb og ekstra elektronik til blandt andet temperaturbeskyttelse og feedback til mikroprocessoren.
1. Darlington kredsløb
2. Darlington transistorer (2x)
3. Driver IC'er med flere Darlington-kredsløb
På siden: kontrolmetoder for aktuatorer styringen af passive, aktive og intelligente aktuatorer ved hjælp af en (effekt)transistor eller FET diskuteres mere detaljeret.