emner:
- ESP generelt
- Andre navne for ESP
- Understyring
- Oprørt
- Styrevinkel sensor
- Tværaccelerationssensor (G-sensor)
- Giringsmomentsensor (giringssensor)
- Bremsetryksensor
ESP generelt:
ESP er en forkortelse af Electronic Stability Program og fungerer i kombination med ABS og ASR. Hvis køretøjet er udstyret med ABS (Anti-lock Braking System) og ASR/ASC (Anti-Slip Regulation / Control), kan ESP-systemet tilføjes ved hjælp af en række ekstra sensorer og en softwarejustering. Komponenterne som hjulhastighedssensorerne og ABS-pumpen/styreenheden bruges også til ESP-systemet. ESP-systemet regulerer også reduktionen af motorkraften; ved at lukke gashåndtaget mere, eller ved at slukke for tændingen.
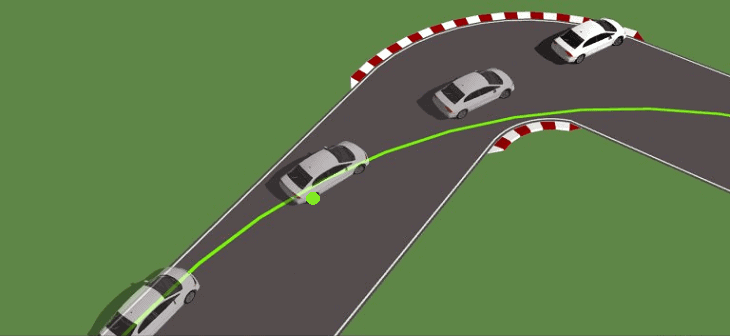
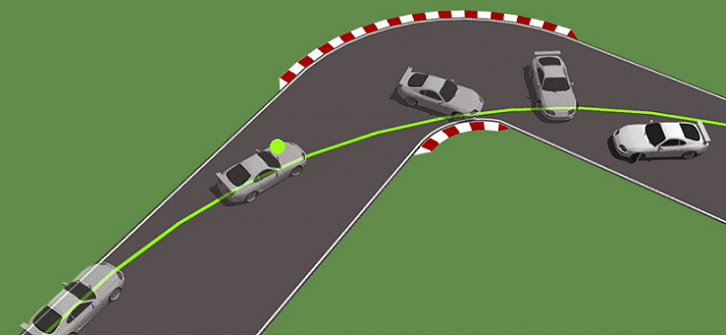
Formålet med ESP-systemet er at forbedre kurveadfærden (under- og overstyring). Det gælder blandt andet i situationer, hvor der bremses i et sving, eller når der finder en undvigemanøvre sted. ESP-systemet bremser det ene hjul på køretøjet, så normale styreegenskaber genoprettes. Nedenfor er de 2 situationer, hvor hjulet angivet med grønt er bremset. Ved at bremse vil køretøjet følge den grønne linje i stedet for at komme ud af kontrol. Forskellige nødvendige ESP-komponenter er beskrevet nederst på denne side.
Andre navne for ESP:
Bilproducenter bruger ofte deres egne navne til ESP til deres modeller, selvom betjeningen er den samme. Disse andre navne er givet for at få systemet til at fremstå "mere luksuriøst" end standard ESP. Eksempler på dette er:
- ASC + T: Automatisk stabilitet og trækkraft (gammel generation af BMW fra før 1996)
- DSC: Dynamisk stabilitetsprogram: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: Dynamic Stability and Traction Control (Volvo)
- ESP: Elektronisk stabilitetsprogram (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagen
- PSM: Porsche Stability Management (Porsche)
- VDC: Vehicle Dynamic Control (Alfa Romeo)
- VDCS: Vehicle Dynamic Control System (Subaru)
- VSC: Køretøjsstabilitetskontrol (Lexus, Toyota)
- VSA: Vehicle Stability Assist (Honda)
Understyring:
Understyring opstår, når fordækkene ikke længere har tilstrækkeligt greb på vejbanen. Bilen vil lave et blidere sving end beregnet, så den vil have en større tendens til at køre ligeud. Forhjulene vil derfor glide til ydersiden af svinget. Understyring kan elimineres for at sikre, at forhjulene igen har tilstrækkeligt greb på vejbanen. For at opnå dette kan du bruge mindre gas eller styre mindre. Endnu mere styring hjælper ikke mod understyring, det kan endda gøre det værre, fordi hjulene kun vil have mindre vejgreb. De fleste bilproducenter justerer chassiset på en sådan måde, at bilen har en tendens til at understyre frem for at overstyre. Årsagen er, at den almindelige bilist straks slipper gassen i sådan en situation (hvilket kan være løsningen, der giver bilen vejgreb igen).
Oprørt:
Overstyring opstår, når bagdækkene ikke længere griber vejbanen. Bilens bagdæk vil glide mod ydersiden af svinget. Bagenden ønsker så at overhale fronten, hvilket får køretøjet til at rotere om sin akse. Overstyring kan korrigeres ved at modstyre og sænke farten for baghjulstrukne biler (f.eks. BMW) og lidt mere gas til forhjulstrukne biler (f.eks. Volkswagen). Ofte, især inden for motorsport, bruges overstyring bevidst for at køre lettere og hurtigere igennem en svingkombination. I et ekstremt tilfælde kaldes denne form for forstyrrelse "drift". Overstyring er generelt farligere end understyring, fordi de fleste bilister er mindre tilbøjelige til at kunne rette op på det. Derfor er chassiset, når man designer bilen, justeret mere mod 'understyring', fordi det er nemmere at rette op på.
Styrevinkelsensor:
Ratvinkelsensoren er monteret på ratstammen. Dette kan være i nærheden af styrestangen, men også i det indre mellem blink-/viskerhåndtagene, som vist på billedet til højre. Det er ratstammekontakterne fra en BMW.
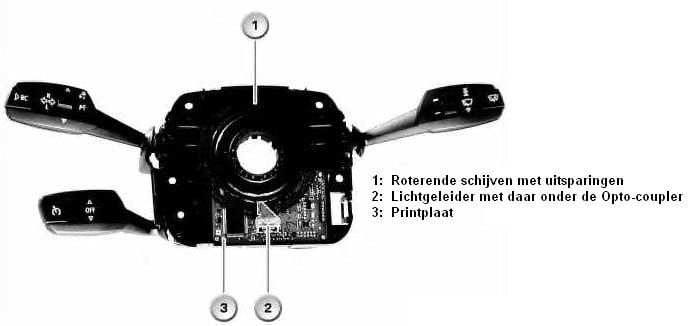
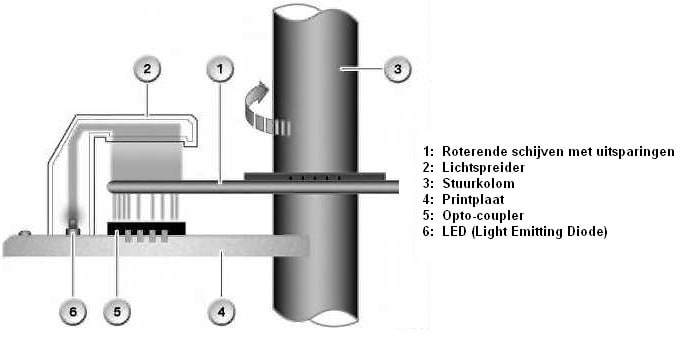
Styrevinkelsensorens opgave er at måle rattets rotationsvinkel. Denne sensor bruger en eller flere optokoblere, der måler lystransmissionen af de roterende skiver. Lysspalterne er forskellige på hvert sted på en roterende skive, hvilket gør det muligt at genkende den nøjagtige position af rattet. Alle udsparingerne i skiverne skaber et asymmetrisk firkantet signal. Optokobleren kan omdanne et lyssignal til en spænding, der så sendes videre til styreenheden.
Tværaccelerationssensor (G-sensor):
Sideaccelerationssensoren (også kaldet G-kræfternes G-sensor) placeres så meget som muligt i midten af bilen. Ved svingning skifter den bevægelige plade (se billedet nedenfor, nummer 2) mellem kondensatorerne (1). Kondensatorerne har en spænding på 5 volt. Når pladen er i midten (dvs. når bilen kører ligeud) er spændingen på begge kondensatorer 2,5 volt. Når bilen foretager et sving (i tilfældet med billedet til venstre), flytter pladen sig til den ene side på grund af centrifugalkraften og centripetalkraften.
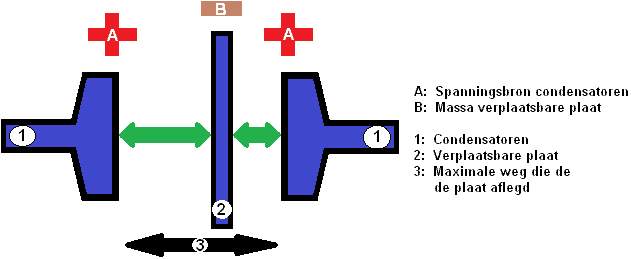
Når pladen skifter, falder kapacitansen af den højre kondensator. Dette bliver nu ikke 2,5 Volt men f.eks. 1,5V. ESP-styreenheden genkender forskellen mellem de to kondensatorer og kan ud fra denne bestemme, hvor stor centrifugalkraften eller centripetalkraften er (dvs. hvor skarpt svinget er lavet. På den måde kan det afgøres, om bilen f.eks. overstyrer) . Værdierne af denne laterale accelerationssensor bruges til at sammenligne dataene fra hjulhastighedssensorerne og bestemme, om ESP-systemet skal gribe ind.
Giringsmomentsensor (giringssensor):
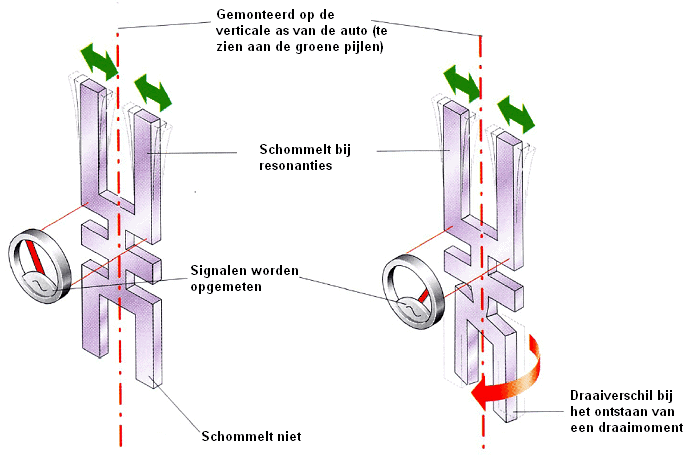
Giringsmomentsensoren, også kaldet “Yaw sensor” på engelsk, placeres så meget som muligt i midten af bilen sammen med sideaccelerationssensoren. Sensoren leverer data, som ESP-systemet har brug for. Giringsmomentsensoren registrerer køretøjets tendens til at rotere omkring den lodrette akse. Værdien af denne måling kaldes rotationshastigheden og vises i grader pr. sekund.
Sensoren består af to stemmegafler. Den øverste stemmegaffel er lavet til at vibrere (resonans) ved 11000 Hz (11kHz) med en vekselspænding og roterer, når køretøjet kører gennem et sving. Jo skarpere bøjningen er, jo mere drejes den nederste stemmegaffel i forhold til den øverste gaffel. Princippet er baseret på gyroskopiske kræfter (Coriolis-kraft). Når den roterende del flyttes ud af position med torsion, skabes gyroskopiske kræfter. Deraf navnet yaw moment sensor.
På grund af torsionen genererer et piezo-element en spændingsforskel, som måles af styreenheden. Den genererede spænding varierer mellem 0 og 5 volt. I hvileposition (når ingen rotation er registreret) udsender sensoren 2,5 volt.
Bremsetryksensor:
Der er også tilføjet separate hydrauliske tryksensorer til bremsesystemet (i begge kredsløb), som kan ses på billederne nedenfor. I ældre biler er disse sensorer placeret i bremseslangerne. I dag er bremsetryksensorerne normalt indbygget i selve ABS-systemets hydrauliske enhed. Denne enhed er ofte synlig under emhætten. Alle hydrauliske bremseledninger er forbundet til denne.

