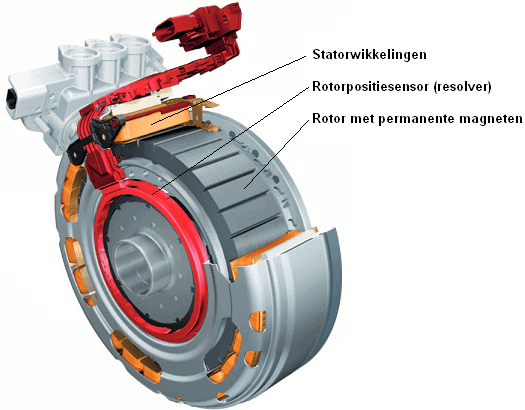
Předmluva: Pro provoz synchronní elektromotor je nezbytné, aby správné proplachování skrz střídač jsou ovládány. Aby bylo možné určit, která cívka (U, V nebo W) by měla být napájena, ECU invertoru čte polohu rotoru, která je měřena snímačem polohy rotoru, také nazývaným „resolver“.
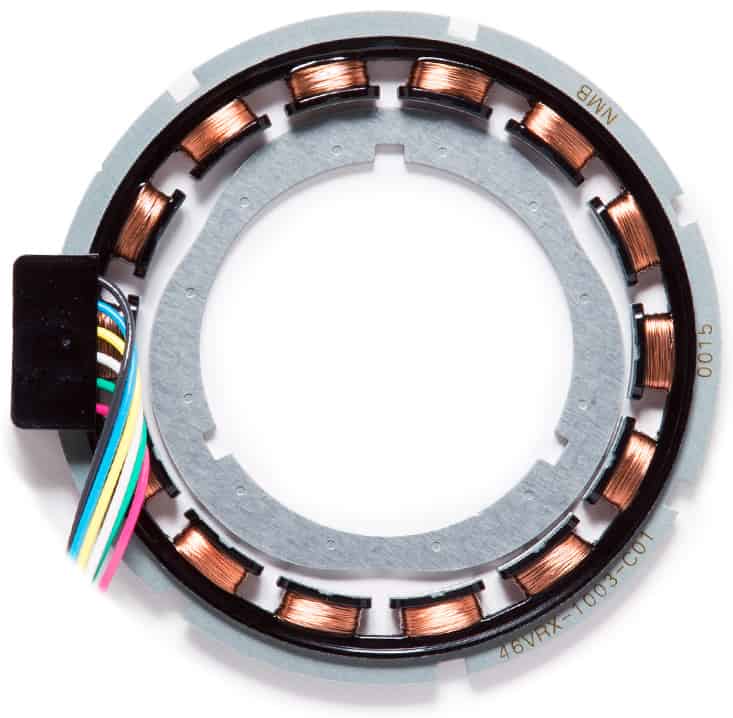
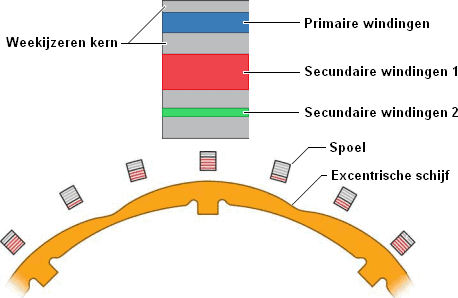
Rezolver se skládá z vnějšího kroužku s řadou cívek na vnitřní straně rotující excentrické desky. Vzdálenost mezi excentrickou deskou a cívkami se při otáčení neustále mění.
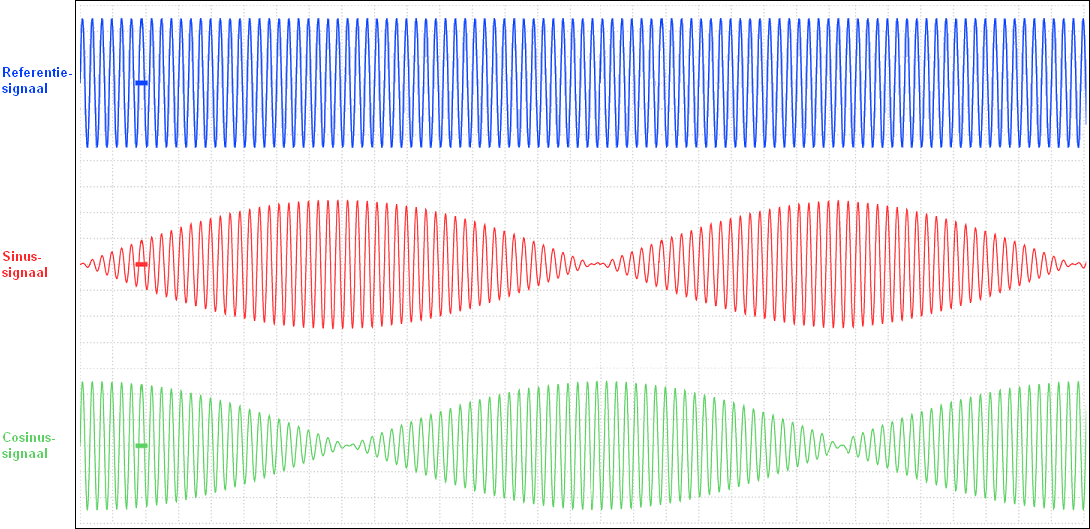
Signály z resolveru: ECU poskytuje resolveru referenční signál. Vzduchová mezera mezi cívkou a excentrem vytváří vysoké nebo nízké sinusové střídavé napětí. Při vysoké amplitudě v červeném nebo zeleném sinusovém signálu (viz obrázek níže) je vzduchová mezera mezi excentrem a cívkou malá.
Resolver funguje jak v klidu, tak i za chodu elektromotoru: v obou případech musí ECU vědět, v jaké poloze je rotor. Obrázek níže ukazuje teoretické signály. Ve skutečnosti je frekvence mnohem vyšší, takže kolísání amplitudy sinusových a kosinových signálů je jasně viditelné.
Dva obrázky níže ukazují skutečné měření na resolveru. I zde vidíme referenční signál nahoře a signály sinus a kosinus dole. První obrázek stojí: elektromotor neběží. Výška sinusového signálu a kosinusového signálu zůstává konstantní. Na základě úrovně tohoto střídavého napětí ECU ví, kde se rotor nachází, když je v klidu.
Signály analyzátoru stojí
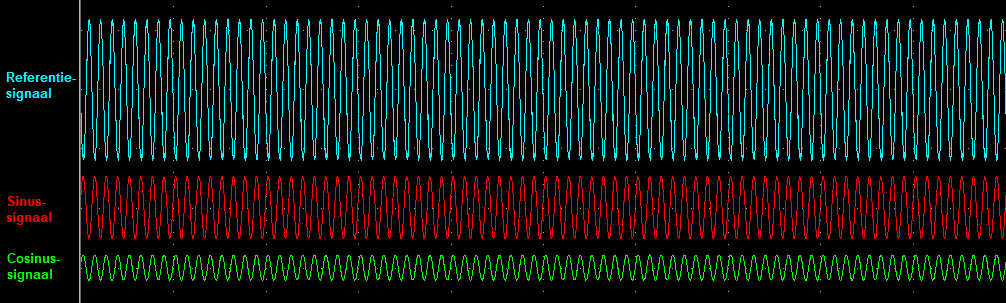
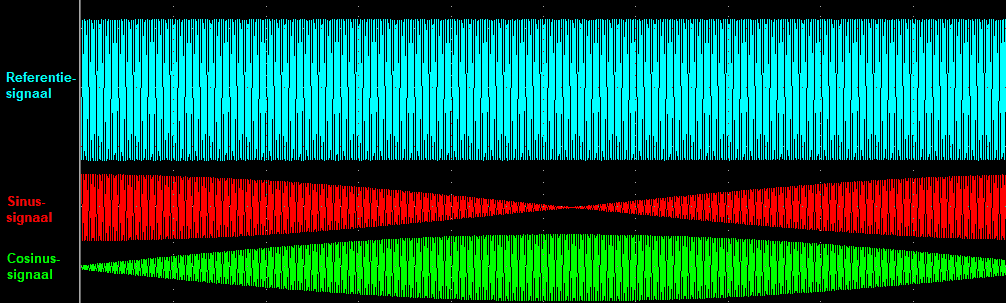
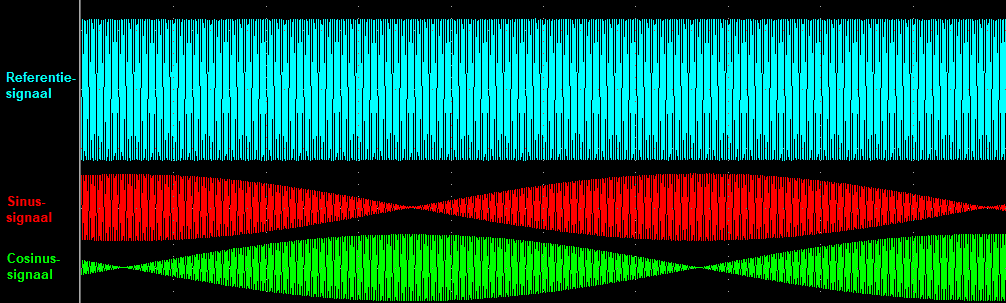
Na dalších dvou obrázcích byl čas na dělení zkrácen. Frekvence referenčního signálu na resolveru je nezměněna, ale měřena po delší časové období měření. V důsledku toho vidíme, jak se amplitudy sinusových a kosinových signálů jasně mění. První snímek byl měřen při nízké rychlosti rotoru a druhý při zvýšené rychlosti. S rostoucí rychlostí se zvyšuje frekvence sinusových a kosinusových signálů (více signálů za jednotku času), ale amplituda (úroveň střídavého napětí) zůstává konstantní.
Signály analyzátoru: nízká rychlost
Signály analyzátoru: rychlost zvýšena
Komponenty resolveru: Resolver VW E-Golf obsahuje 30 cívek zapojených do série. Každá cívka v resolveru se skládá z měkkého železného jádra se třemi různými vinutími: primární, sekundární 1 a sekundární 2.
Primární cívka (modrá) je napájena vysokofrekvenčním střídavým napětím.
Počet sekundárních závitů (1 červená, 2 zelené) je na každé cívce jiný.
Když se vačka excentrické desky pohybuje podél cívky, indukčnost v sekundárních vinutích se zesílí. V důsledku počtu závitů sekundárních vinutí 1 a 2 v každé cívce to také vede k rozdílným napětím v sekundárních vinutích. ECU ve střídači dokáže vypočítat polohu rotoru na základě napětí sekundárních vinutí 1 a 2.
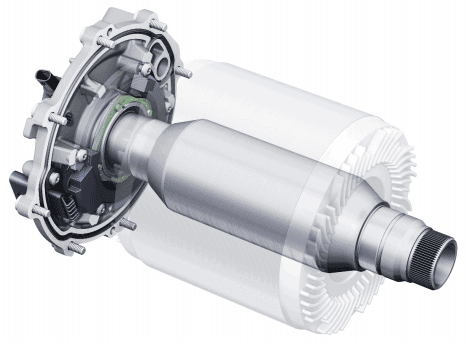
Nastavení resolveru k rotoru je velmi přesné: mnoho výrobců předepisuje výměnu celého elektromotoru, pokud se vyskytnou problémy s resolverem. Po (náhodné) demontáži resolveru nebo povolení šroubů na vnější straně skříně elektromotoru již nelze resolver správně sestavit. I v tom případě řada výrobců předepisuje výměnu elektromotoru.
Přesná poloha rotoru a synchronní motor musí být znát při stání a za jízdy. Pokud je snímač vadný, vozidlo již nemůže jet.
Od asynchronní motor na druhé straně není nutné žádné sledování polohy rotoru. Snímač polohy rotoru vysílá čtyři impulsy na otáčku rotoru. Toto měření sleduje maximální velikost skluzu mezi rotujícím magnetickým polem mezi statorem a rotorem. Hallův senzor se často používá jako senzor. Hallův snímač vysílá impulsy do ECU, když se rotor otáčí, ale nemůže provádět měření v klidu, na rozdíl od resolveru synchronního motoru. Výrobci se také někdy rozhodnou použít resolver synchronního motoru jako snímač polohy rotoru.