Předměty:
- Obecná pomoc při parkování
- Parkovací kontrola
- Couvací kamera
- Boční pohled
- Pohled do okolí
- Pomoc při parkování
Obecná pomoc při parkování:
Parkovací asistent zahrnuje systémy, které pomáhají řidiči při najíždění a vyjíždění z parkování. Nejznámějším parkovacím asistenčním systémem je „park distance control“, zkráceně PDC. Tento systém informuje řidiče vozidla o vzdálenosti od vozu vzadu, u rozsáhlých systémů i v přední části vozidla. Tato stránka popisuje moderní technologie, které jsou buď rozšířením parkovacího distančního systému, nebo zcela samostatným asistenčním systémem.
Parkovací kontrola:
Park Distance Control (PDC) je systém varování vzdálenosti, který měří signály při vjezdu a výjezdu z parkovacích míst a poskytuje informace o vzdálenosti od překážky. V zadním nárazníku a často i v předním nárazníku jsou ultrazvukové senzory (viz obrázek). Ty vydávají zvukové vlny s velmi vysokou frekvencí, které jsou pro lidské ucho nepostřehnutelné. Tyto ultrazvukové frekvence se odrážejí od blízkých objektů a jsou přijímány senzorem. Senzor měří čas mezi odesláním a přijetím těchto signálů. Čím blíže je objekt, tím rychleji se signál odrazí. Snímač jej zachytí a předá do řídicí jednotky PDC (počítače).
Tento počítač jej může přenášet do řidiče ve zvukových signálech a s obrazovými i zvukovými signály. Poté se ozve pípnutí, které se s přibližováním předmětu stále zrychluje. Ve vzdálenosti přibližně 30 cm vydává nepřetržité pípání, které vám jako řidiči říká, že musíte zastavit.

Moderní palubní počítače jsou často vybaveny možností, kdy se vzdálenost k objektu zobrazuje na obrazovce. Senzory PDC jsou stejné; řídicí jednotka vypočítává data ze senzorů a zpracovává je na informace, které může zobrazit obrazovka.
Obrázek níže ukazuje řídicí jednotku PDC (ECU). Tento šedý čtverec obsahuje mikrokontrolér, zesilovač a hradlo AND. Mikrokontrolér přenáší obdélníkové napětí s frekvencí přibližně 40 kHz (černá). Blokové napětí s nízkou frekvencí je také periodicky vydáváno (červená/modrá). Brána AND přijímá dvě bloková napětí. Když jsou obě napětí vysoká, výstupní napětí (napravo od hradla AND) je vysoké. Když je jedno ze dvou napětí nízké, sníží se také výstup. Výstupní napětí je posíláno zpět do mikrokontroléru a do vysílače v PDC senzoru. Vysílač vysílá ultrazvukový signál rychlostí přibližně 300 m/s. Když je objekt v blízkosti, ultrazvukový zvuk se odráží a přijímač jej zaznamená. Říkáme tomu „triangulace“. Přijímač posílá vytvořený blokový signál do ECU. Blokový signál je zesílen pomocí zesilovače a následně zpracován mikrokontrolérem.
Doba mezi přijetím výstupního signálu z hradla AND a zesilovače je mírou vzdálenosti k objektu. Čím menší je vzdálenost mezi PDC senzorem a objektem, tím kratší je čas. Mikrokontrolér ovládá bzučák nebo komunikuje s jinými řídicími jednotkami po sběrnici CAN.
Níže uvedené schéma zapojení (VAG) ukazuje komunikaci mezi řídicími jednotkami, vstupy do spínačů a výstupy mimo jiné do bzučáku.
Řídicí jednotka PDC (J446) přijímá signál rychlosti jízdy a zpětného chodu přes sběrnici CAN. Řídicí jednotka PDC posílá modulované blokové napětí přes připojení T12/11 do kabelového spoje (X86 v zadním nárazníku), který je připojen ke všem snímačům PDC (G203, G334, G335 a G206). Každý snímač PDC má svůj vlastní signální vodič (přes pin 2) k ECU. Dále je uzemnění každého snímače připojeno k zemnímu svaru (352).
V okamžiku, kdy jeden nebo více senzorů detekuje předmět, řídicí jednotka aktivuje bzučák (H15). V závislosti na vzdálenosti od objektu vydává bzučák rychlejší nebo pomalejší přerušovaný zvukový signál.

Díky komunikaci s diagnostickým rozhraním (J533) je možné provádět následující diagnostické funkce:
- dotaz na paměť závad
- Upravte kódování řídicí jednotky (např. po rozšíření systému o PDC senzory vpředu nebo po instalaci tažného zařízení)
- upravte hlasitost bzučáku
- Dotazujte se na bloky naměřených hodnot mimo jiné ze vzdálenosti od všech senzorů k objektu, vypočtené vzdálenosti a doby stabilizace vysílače a přijímače.
Couvací kamera:
Kromě parkovací kontroly může být parkovací asistent vybaven také couvací kamerou. V okamžiku, kdy řidič zařadí zpátečku nebo stiskne tlačítko v interiéru, aktivuje se kamera v zadní části vozidla. Obraz obvykle zobrazuje obrazovka rádia nebo palubního počítače.
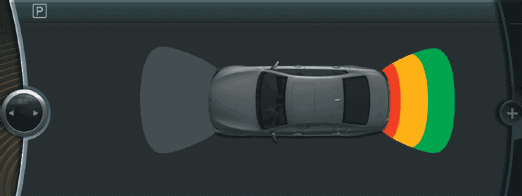
Obrázek níže ukazuje displej BMW s obrázkem na zadní části vozidla. Vpravo od obrazu kamery je vozidlo s třídílnou mřížkou vpředu a vzadu; To ukazuje vzdálenost k objektu, kterou registrují PDC senzory.
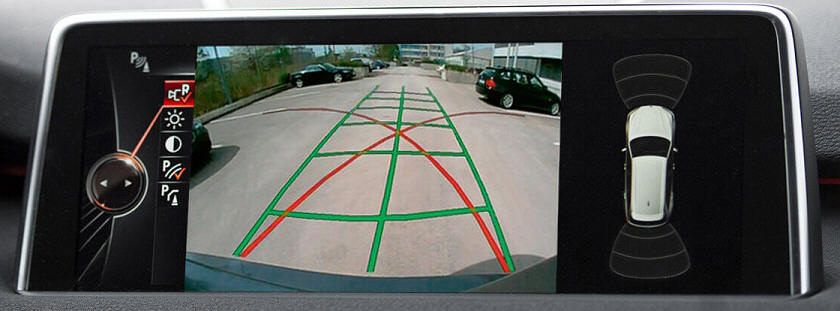
Na snímku z couvací kamery jsou vidět červené a zelené čáry. Červené čáry ukazují možný směr, kterým lze vozidlo řídit; Při maximálním řízení budou kola sledovat červenou čáru na vnější straně zatáčky. Zelená mřížka sleduje směr natočení řídítek; v tuto chvíli jsou přední kola přímo vpřed. Když řidič otočí volantem, zelené čáry označují skutečné jízdní linie. Snímač úhlu natočení volantu registruje polohu volantu.
Zpětná kamera je někdy na viditelném místě a často se nachází v blízkosti registrační značky a/nebo kliky pro otevření zadních výklopných dveří. Někdy se výrobci rozhodnou připevnit kameru mimo dohled. Obrázek níže ukazuje couvací kameru VW Golf, kde elektromotor naklání emblém VW, aby se kamera posunula směrem ven. Při další jízdě vpřed se znak automaticky složí zpět. Nejen, že je fotoaparát umístěn mimo dohled, objektiv se také méně rychle zašpiní.

Boční pohled:
Když couváte mezi dvěma vozidly nebo velkými předměty, musíte jet trochu dopředu, abyste se podívali doleva a doprava. To je mnohem snazší s boční kamerou (nazývanou také rohový pohled); kamery vlevo a vpravo v předním nárazníku posílají obraz na obrazovku v palubní desce. Obrázek ukazuje obraz z rohových kamer. Kamery bohužel nelze namontovat neviditelně. Vozy vybavené boční kamerou mají (často) černou čočku v nárazníku. Na obrázku níže je přední nárazník BMW s levou kamerou.


Pohled do okolí:
Mezi nejluxusnější parkovací asistenční systémy bezesporu patří „surround view“, známý také jako top view, 3D nebo bird-view. Každá značka dává systému svůj vlastní název a charakteristiku. Nyní používáme název prostorový pohled.
Při prostorovém zobrazení se na obrazovce zobrazuje horní část vozu. Vypadá to, jako by se kamera dívala na střechu auta a okolí. Auto je simulace a prostředí je snímáno několika (obvykle čtyřmi) složenými kamerami.
Následující tři obrázky (od BMW) ukazují obrázek, který vidí řidič. Při parkování je jasně patrné oddělení parkovacího místa a předmětů jako jsou sloupky apod. Při couvání můžete zadní část přiblížit; Zde můžete vidět především rostliny. Konvenční PDC senzory zaznamenávají vzdálenost k rostlinám. Počítač označí tuto vzdálenost červenou barvou.

Během parkování vpředu může systém zobrazovat také okolí a předek. Senzory PDC nyní také pomáhají určit vzdálenost k plotu.

Paralelní parkování podél obrubníku může, pokud řidič nebude opatrný, způsobit poškození pneumatik a ráfků. Prostorový pohled také nyní nabízí řešení; Díky dobrému přehledu o pouliční scéně můžete zaparkovat rovně a blízko obrubníku. Nejnovější vývoj od BMW umožňuje invertovat obraz kamery a simulovat vozidlo.

Další tři obrázky ukazují místa, kde se kamery často nacházejí.



Pomoc při parkování:
Jako rozšíření parkovacího asistenta může takzvaný „asistence při parkování“ pomoci řidiči při opuštění parkovacího místa pozadu s omezenou viditelností. To může být v situacích, kdy je vozidlo zaparkováno u zdi nebo mezi vozidly.
Senzory v zadní části vozu detekují provoz projíždějící za vozidlem a případně představující riziko kolize. Patří sem všechny pohybující se předměty, které se k vozidlu přibližují určitou rychlostí. Když parkovací asistenční systém detekuje blížící se vozidlo, na displeji informačního systému se zobrazí zpráva. K tomu se obvykle přidává akustický zvukový signál. Pokud řidič tyto signály ignoruje a jede couváním, systém fyzicky zasáhne ovládáním brzd, aby vozidlo zpomalil.
