Převod napětí analogových snímačů na digitální zprávu
Převod signálu generátoru pulsů na digitální zprávu
Výstupní signály
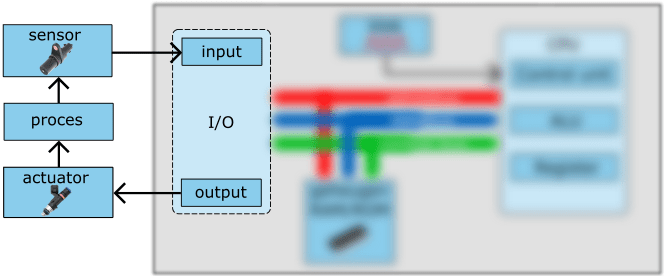
Předmluva: Ve většině případů musí být elektrické signály ze senzorů upraveny předtím, než jsou předloženy procesoru. Akční členy jsou ovládány na druhé straně počítače. Často se jedná o indukční obvody, které často spínají velké proudy. Hardware pro úpravu signálů snímačů a proudů akčních členů se nazývá obvody rozhraní. Obvod rozhraní zajišťuje převod analogového napětí na digitální.
senzory přenášet napětí s malým proudem. Obvod rozhraní převádí napětí na digitální hodnotu (0 nebo 1). Intenzita proudu je nízká se signálem senzoru;
Akční členy vyžadují vyšší proud. Do ovládací akční členy, jsou umístěny v ECU ve formě (kombinace) tranzistorů nebo FET, které se také nazývají „drivery“. Podrobněji to probereme v části „Výstupní signály“.
Obrázek níže ukazuje snímače a akční členy systému řízení (benzínového) motoru. Nejvyšší skupina snímačů (od snímače polohy plynového pedálu po lambda sondy) spadá do kategorie „analogové“. To znamená, že vstupní napětí snímače musí být nejprve digitalizováno v ADC (analogově – digitálním převodníku). Spodní skupina snímačů (snímač polohy klikového hřídele až snímač rychlosti vozidla) již poskytuje svůj signál digitálně. Signály zapnutí-vypnutí nebo bloková napětí jsou přímo přiváděny do CPU.
Akční členy vpravo jsou ovládány koncovým stupněm. Koncový stupeň, nazývaný také budič, sestává z obvodu několika tranzistorů pro generování použitelného napětí a proudu z řídicího impulsu z počítače pro ovládání akčního členu.
Systém řízení motoru se senzory (vlevo) a akčními členy (vpravo)
Tranzistorová tranzistorová logika (TTL): Procesor pracuje s napětím 5 voltů. Vstupní a výstupní napětí je proto omezeno na rozsah 0 až 5 voltů (úroveň TTL, zkráceně z Transistor Transistor Logic). U signálů, které se odchylují od této napěťové úrovně, se nastavení provádí v obvodu rozhraní.
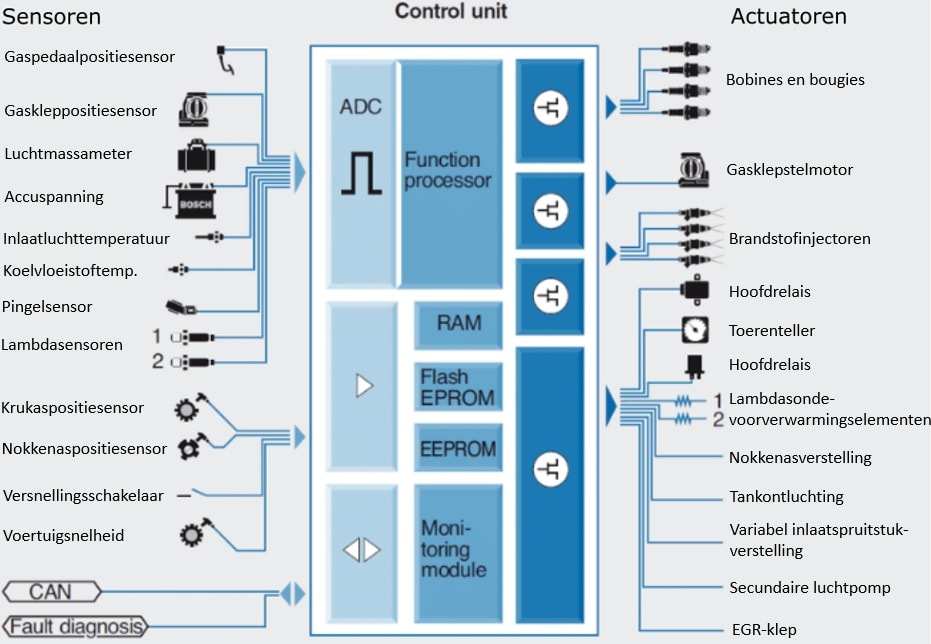
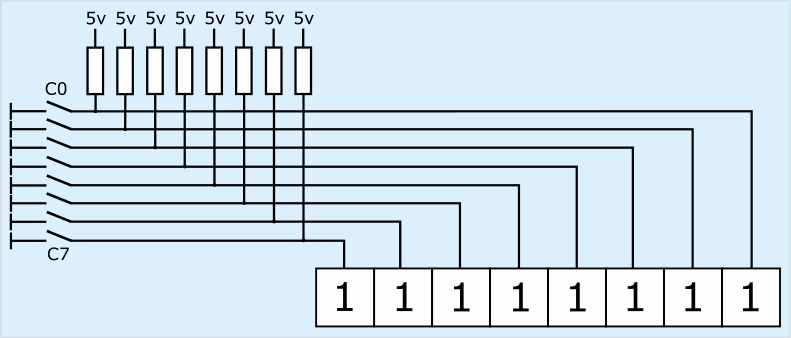
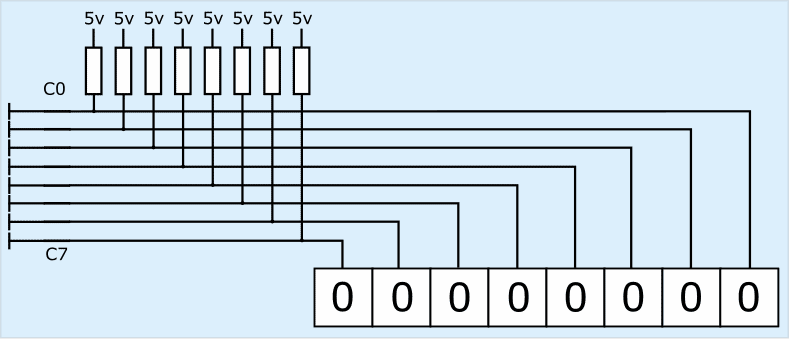
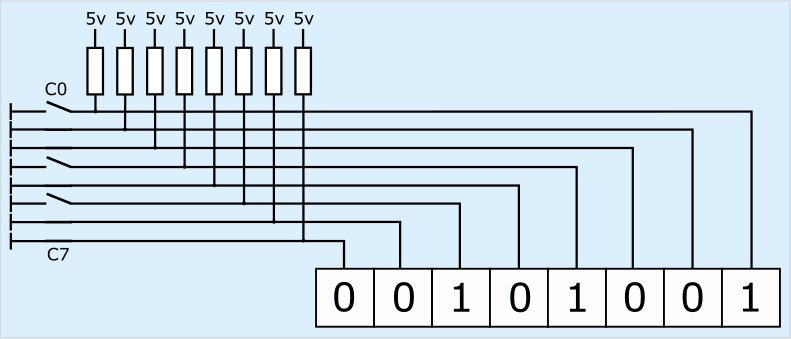
Obrázky níže ukazují, jak se z polohy přepínače tvoří 1 nebo 0. Pomocí pull-up rezistoru poskytuje napětí 5 voltů a logický 1 na vstupu procesoru při rozepnutí spínače. Napětí na pull-up rezistoru pak není spojeno se zemí. Když se spínače sepnou, dojde k poklesu napětí na pull-up rezistoru. Napětí 0 voltů na vstupu procesoru je vnímáno jako logický 0.
Všechny spínače otevřeny: 11111111 na vstupu procesoru
Všechny spínače sepnuté: 00000000 na vstupu procesoru
Kombinace otevřených a zavřených spínačů vytváří řadu jedniček a nul. Na obrázku je 8bitová zpráva pro procesor: 00101001.
U 8bitového procesoru se osm bitů čte současně za cyklus. Během dalšího cyklu, který se odehrává během dalšího „tiknutí“ hodin (viz systémová sběrnice na stránce o činnosti ECU) následuje sekvence s osmi novými bity.
Rozepnuté a sepnuté spínače: 00101001 na vstupu procesoru
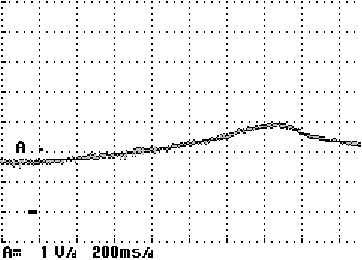
Převod napětí analogového snímače na digitální zprávu: Digitální vstupní signály jsou zpracovávány přímo procesorem. Analogové signály jsou nejprve převedeny na digitální signál v A/D převodníku. Jako příklad si vezmeme analogovou křivku napětí snímače tlaku turba:
při volnoběhu je napětí přibližně 1,8 voltu;
při akceleraci napětí stoupne téměř na 3 volty.
Změnu napětí nelze zpracovat přímo v procesoru. Nejprve je třeba naměřené napětí převést na desítkovou hodnotu (0 až 255).
S rozsahem od 0 do 5 voltů a desetinnou hodnotou od 0 do 255 (takže 256 možností). Jednoduchý výpočet ukazuje, že pokud rozdělíme 5 voltů na 256 možností, lze provést kroky po 19,5 mV (0,0195 voltu).
Výše uvedený příklad ukazuje vývoj napětí v závislosti na čase snímače tlaku turba. Napěťová křivka snímače teploty a snímače polohy plynového pedálu je stejná, jen v jiném časovém rámci: ohřev chladicí kapaliny trvá déle než navinutí turba.
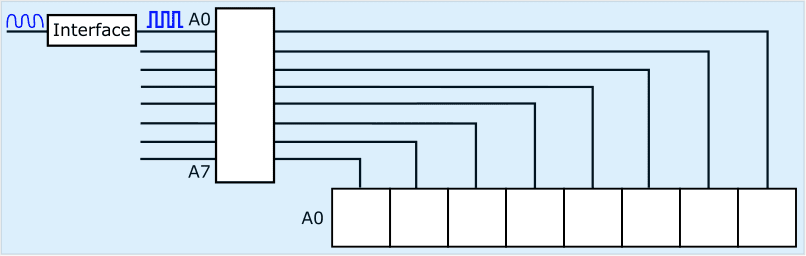
Dříve v této části je obrázek zobrazující kategorii analogových signálů. Ten ukazuje mimo jiné snímač teploty a snímač polohy plynového pedálu. Analogové napětí je v A/D převodníku převedeno na 8bitovou jednotku informace. Mnoho procesorů s více vstupními piny má pouze jeden A/D převodník. Více analogových signálů je kombinováno do jednoho signálu pomocí multiplexování.
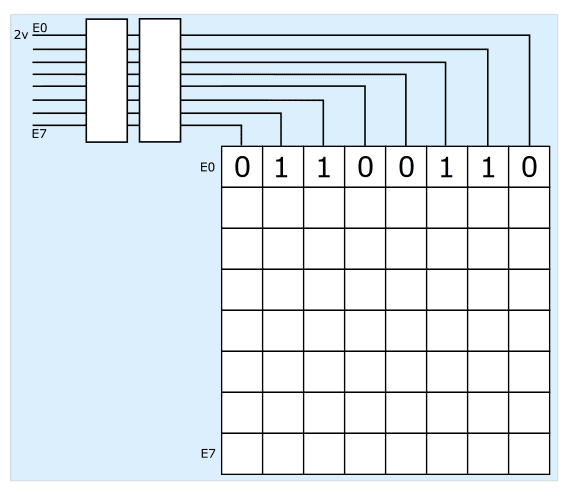
V tomto příkladu vidíme A/D převodník s osmi vstupy. Na pinu 0 je napětí 2 volty. Piny E1 až E7 mohou být napájeny současně napětím. Ty jsou jeden po druhém převedeny na digitální zprávu pomocí multiplexování.
Napětí 2 V se převede na binární hodnotu. Pomocí následujícího vzorce můžeme převést analogové napětí na desítkovou hodnotu a poté ji převést na binární hodnotu:
2v / 5v * 255d = 102d
Zde vydělíme vstupní napětí (2v) maximálním napětím (5v) a vynásobíme maximální desetinnou hodnotou (255).
Provedením nějakého výpočtu nebo provedením úhledného triku můžeme převést desetinné číslo 255d na binární hodnotu 01100110. Podívejte se na tuto stránku: binární, desítkové, šestnáctkové.
8bitový A/D převodník
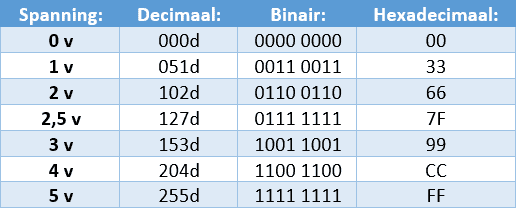
Následující tabulka ukazuje desítkové, binární a hexadecimální hodnoty spojené s různými napětími.
Při čtení živých dat může být zobrazena desítková, binární nebo hexadecimální hodnota signálu senzoru.
Napěťový signál <0,5 voltu (025d) je považován za zkrat k zemi;
Pokud signál stoupne nad 4,5 voltu (220 d), počítač to přeloží jako zkrat s kladným pólem.
Napětí v desítkových, binárních a hexadecimálních hodnotách
Převod signálů pulzního generátoru na digitální zprávu: Signály z pulzních generátorů, včetně indukčního snímače polohy klikového hřídele, jsou ve skutečnosti signály zapnuto-vypnuto, které vznikají poté, co se zuby pulzního kola přesunou za snímač. Střídavé napětí snímače musí být nejprve převedeno na obdélníkové napětí, než je signál předán procesoru.
Na obrázku vidíme sinusové střídavé napětí na levé straně rozhraní. V elektronice rozhraní se toto střídavé napětí převádí na obdélníkové napětí. Toto napětí bloku je pak čteno blokem časovače/počítadla: když je puls vysoký, počítadlo začne počítat a přestane počítat, když se puls opět zvýší. Počet počtů je měřítkem doby období. frekvence signálu.
Převod signálu generátoru pulsů na digitální signál pomocí bloku časovače/čítače
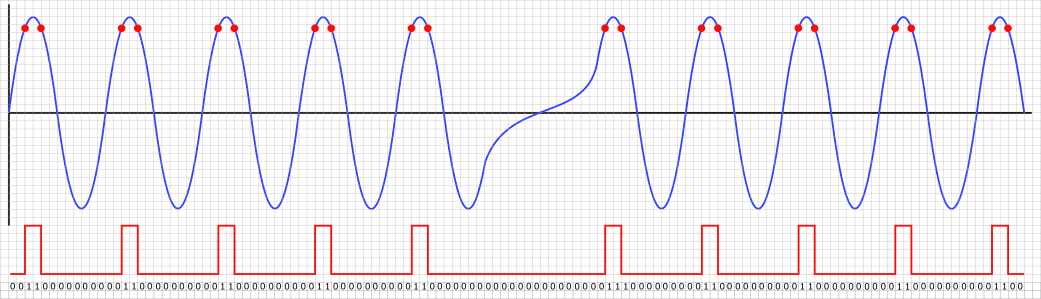
Na obrázku níže vidíme signál z indukčního snímače klikového hřídele s červenými tečkami na horních bocích. Červené body jsou nastaveny na napětí pro zvýšení (logická 1) nebo snížení (logická 0) napětí bloku. Vysvětlení pokračuje pod tímto obrázkem.
Sinusové střídavé napětí a digitalizovaný signál bez hystereze
Napětí snímače však není nikdy zcela čisté. Vždy bude docházet k malému kolísání napěťového profilu. V takovém případě to může elektronika rozhraní nesprávně indikovat jako logickou 0, zatímco ve skutečnosti by to měla být 1.
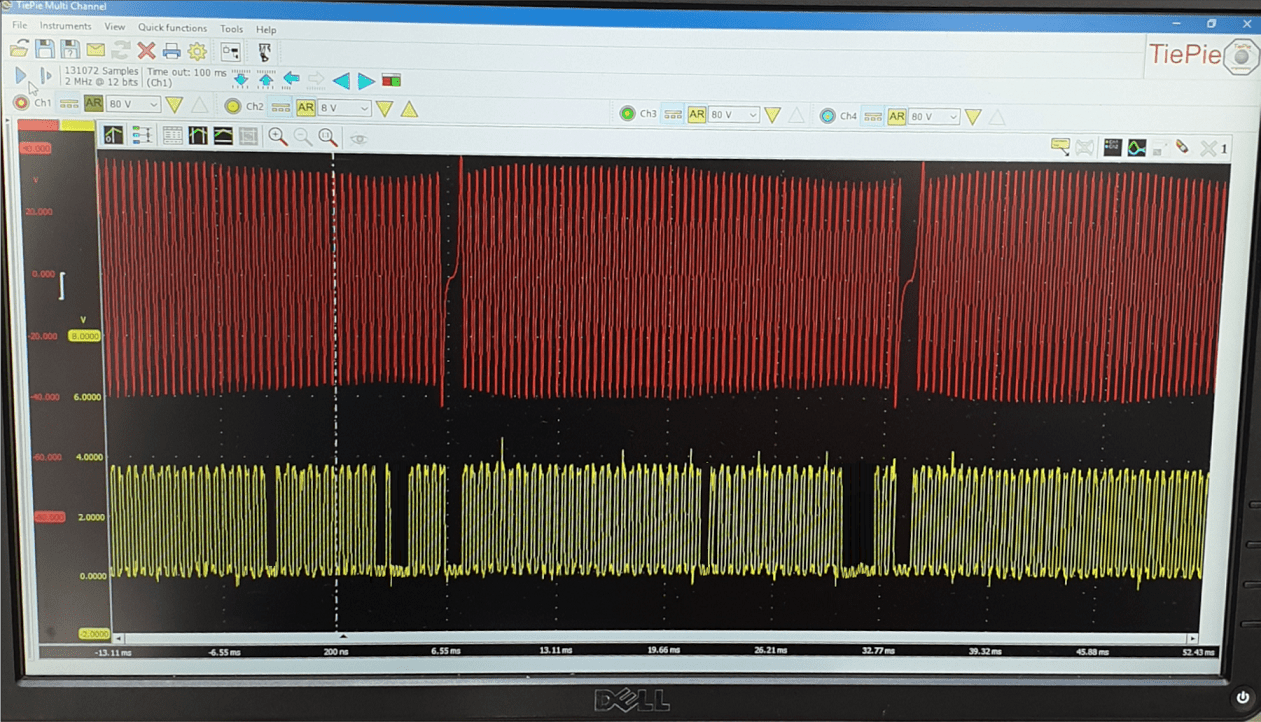
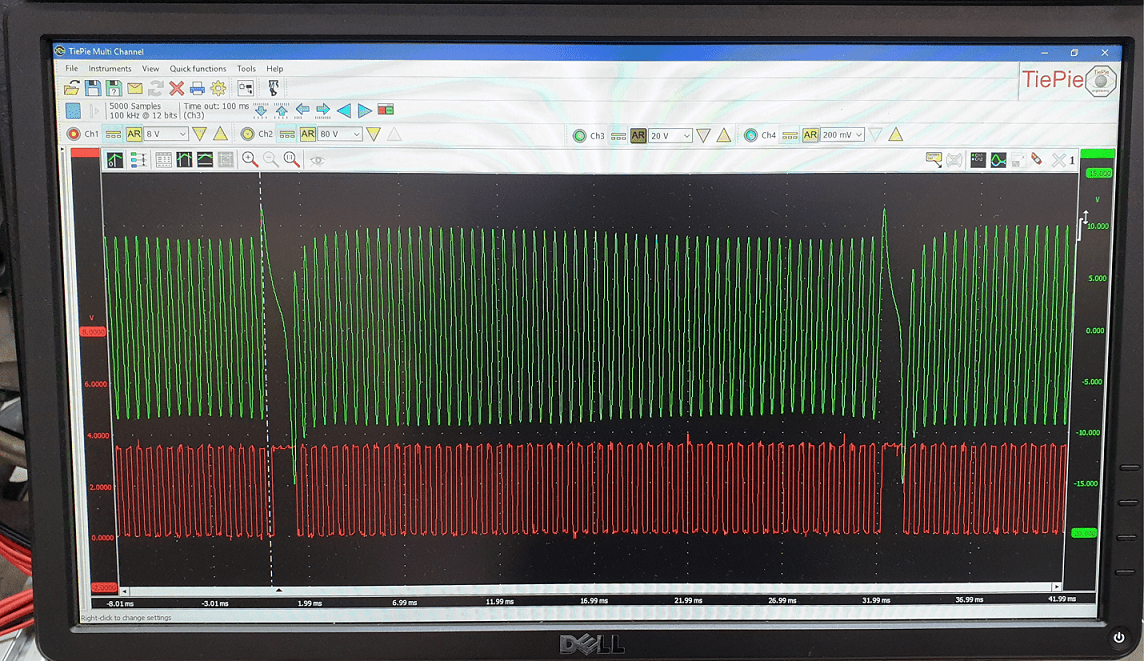
Níže uvedený snímek dalekohledu byl zaznamenán při jeho spuštění Projekt BMW Megasquirt. Obrázek dalekohledu ukazuje digitalizaci (žlutá) signálu indukčního klikového hřídele (červená). Obrázek jasně ukazuje, že v signálu žlutého bloku chybí impulzy, zatímco v signálu klikového hřídele v tu chvíli neprochází žádný chybějící zub.
Nečistý digitální signál obsahuje chyby: toto jsou chybějící informace
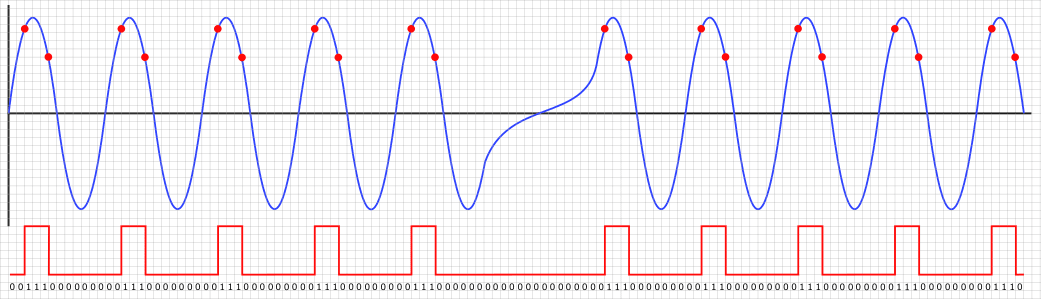
Aby malé kolísání napěťového profilu nezpůsobilo nesprávnou interpretaci ECU, byla zabudována tzv. hystereze. Hystereze je rozdíl mezi náběžnou a sestupnou hranou napěťového profilu. Na obrázku níže vidíme, že červené tečky na vzestupných hranách jsou na vyšším napětí než červené tečky na sestupných hranách. Můžeme si tak být jisti, že malé kolísání signálu neovlivní digitální konverzi.
V prvním odstavci, kde jsme začali o převodu pulzního signálu na digitální, již bylo zmíněno, že frekvence signálu je určena na základě doby mezi dvěma vzestupnými hranami čtvercového signálu. Z těchto příkladů lze jasně odvodit, že hystereze má vliv na šířku čtvercového signálu, ale nemá žádný vliv na dobu mezi vzestupnými hranami, a proto nemá žádný vliv na frekvenci signálu.
Digitalizovaný signál pulzního generátoru s hysterezí
Při správně nastavené hysterezi se sinusový signál správně převede na použitelné obdélníkové napětí s tím, že jen ty vícenásobné logické jsou v místech, kudy prochází chybějící zub.
Vezměte prosím na vědomí, že při nastavování ECU MegaSquirt byla změněna nastavení, včetně spouštění na vzestupné a sestupné linii. Výsledkem je, že při projetí chybějícího zubu v prvním příkladu je napětí 0 voltů a na obrázku dalekohledu pod napětím je 5 voltů.
Signál pulzního generátoru s čistým a správným obdélníkovým napětím
Výstupní signály: Výstupní signály se skládají z digitálních impulzů zapnutí/vypnutí s rozsahem napětí mezi 0 a 5 volty (úroveň TTL) s velmi nízkým proudem. Pohony však vyžadují ovládání vyššími úrovněmi napětí a proudy. Signály zapnutí/vypnutí lze modulovat šířkou pulzu (PWM), kde se šířka pulzu může měnit při konstantní frekvenci.
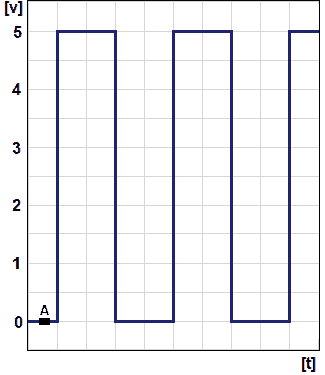
Následující obrázek ukazuje obdélníkové napětí na úrovni TTL jako funkci času. The pracovní cyklus tohoto PWM signálu je 50 %.
K ovládání akčních členů jsou zapotřebí ovladače. Pomocí digitálního výstupního signálu lze dosáhnout požadovaného proudu pomocí budiče. V další části se budeme zabývat ovladači.
Příklad: PWM signál
Drivery najdeme v každé ECU a v některých aktuátorech, jako jsou zapalovací cívky DIS. Ovladač se také nazývá koncový stupeň nebo výkonový tranzistor. Ovladač umožňuje převádět výstupní signály na úrovni TTL: 0 až 5 voltů, s nízkým proudem 1 mA z ECU na napětí do 14 voltů a proudy do přibližně 10 A.
Ovladač může připojit několik tranzistory obsahovat. Takový tranzistor nazýváme „Darlingtonův tranzistor“. Následující obrázky ukazují následující obvody:
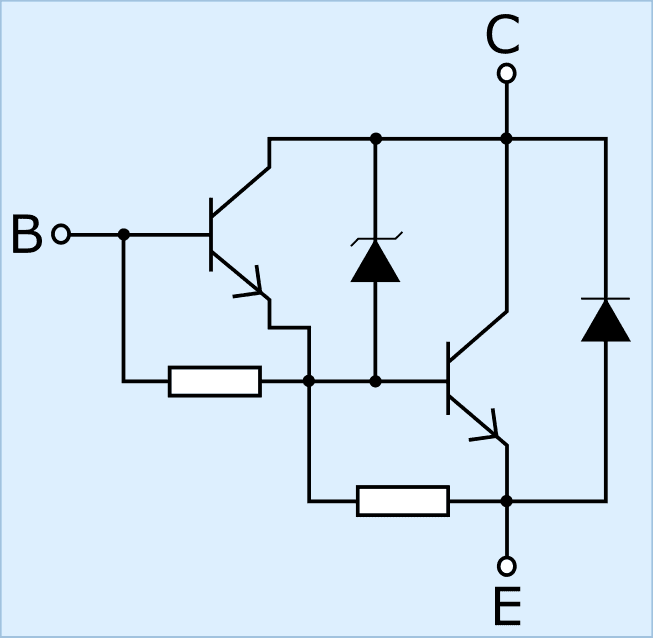
Schéma Darlingtonova obvodu se dvěma tranzistory pro řízení zapalovací cívky (zdroj: datasheet BU941ZR).
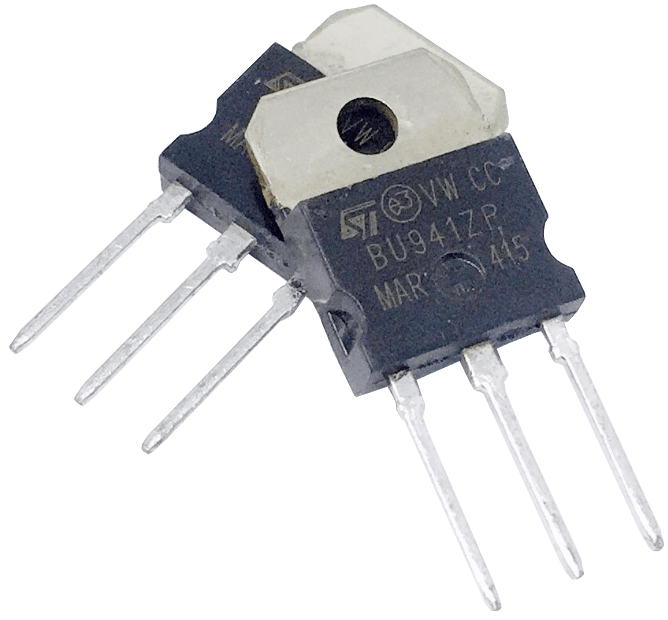
Dva tranzistory, každý s obvodem Darlington (BU941ZR)
Ovladač IC s Darlingtonovými obvody a další elektronikou mimo jiné pro teplotní ochranu a zpětnou vazbu k mikroprocesoru.
1. Darlingtonův okruh
2. Darlington tranzistory (2x)
3. IO ovladače s více obvody Darlington
Na stránce: způsoby ovládání pohonů podrobněji je rozebráno řízení pasivních, aktivních a inteligentních aktorů pomocí (výkonového) tranzistoru nebo FET.