Předměty:
- Úvod
- AC elektromotor (synchronní, s permanentními magnety)
- Střídavé řízení synchronního motoru
- Střídavý elektromotor (asynchronní, motor s kotvou nakrátko)
- Mapa účinnosti synchronního a asynchronního elektromotoru
Předmluva:
K pohonu hybridního nebo plně elektrického vozidla se používá elektromotor. Elektromotor přeměňuje elektrickou energii (z baterie nebo prodlužovače dojezdu) na pohyb k pohonu kol. Elektromotor navíc dokáže při brzdění motorem přeměnit kinetickou energii na elektrickou energii: rekuperační brzdění. V takovém případě funguje elektromotor jako dynamo. Kvůli těmto dvěma funkcím nazýváme elektromotor také „elektrický stroj“.
Možnosti umístění elektromotoru do hybridního vozidla jsou:
- Na spalovací motor, kde je převod dosaženo přes víceřemenový nebo přímo přes klikový hřídel;
- Mezi motorem a převodovkou: vstupní hřídel převodovky je poháněn elektromotorem;
- Integrováno v převodovce;
- Na diferenciálu;
- U nábojů kol (nábojový motor).
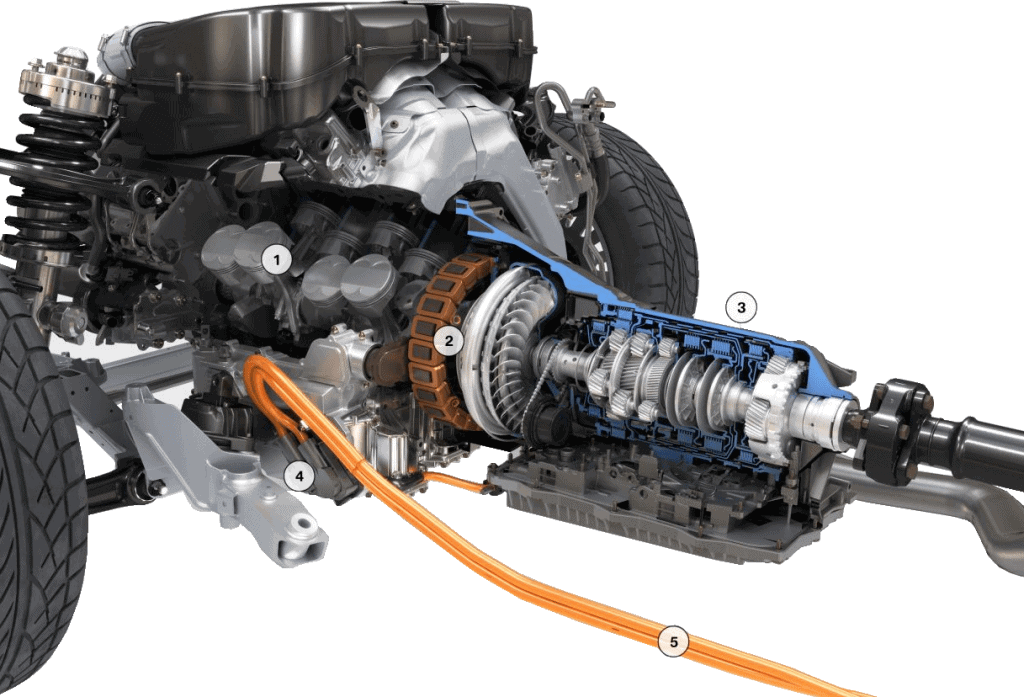
Elektromotor plně elektrického vozu je často namontován na zadní nápravě. Obrázek níže ukazuje elektromotor s měničem ve válcovém pouzdře a koncový pohon Tesly.

Střídavý elektromotor (synchronní, s permanentními magnety):
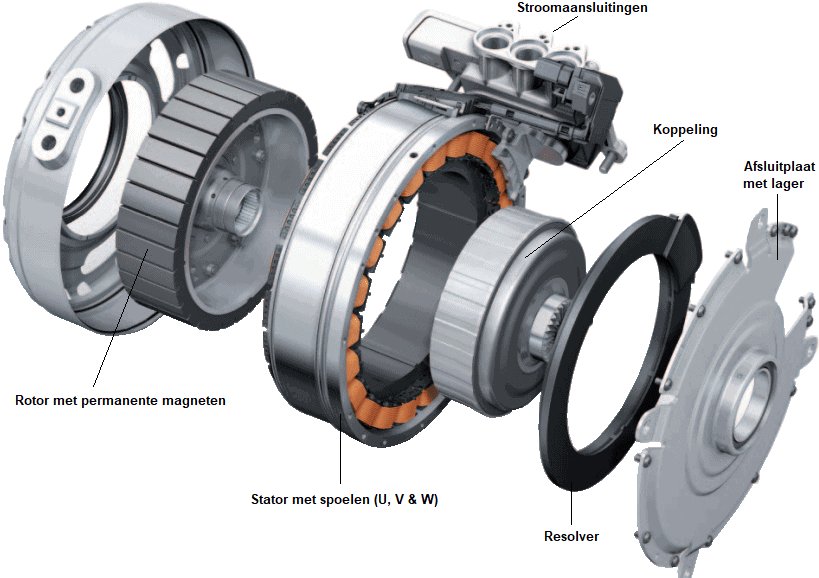
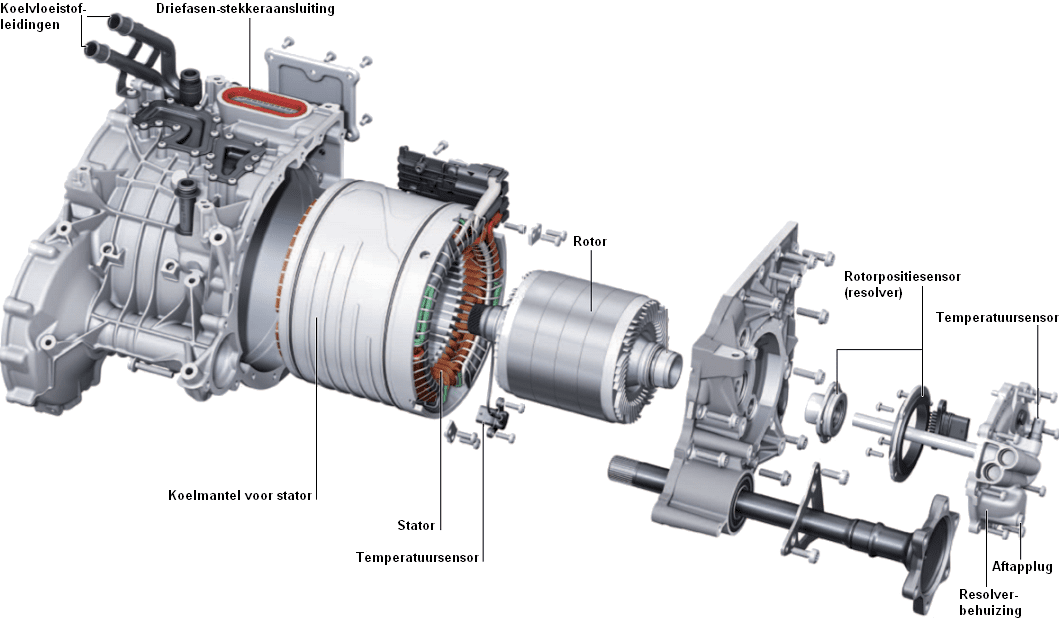
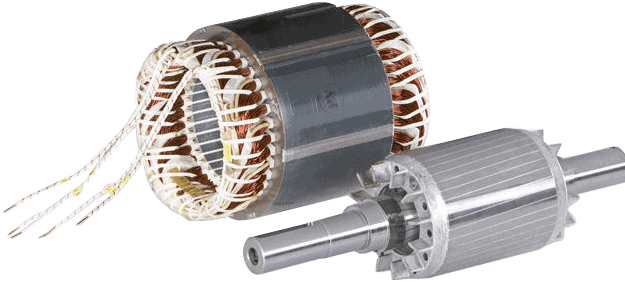
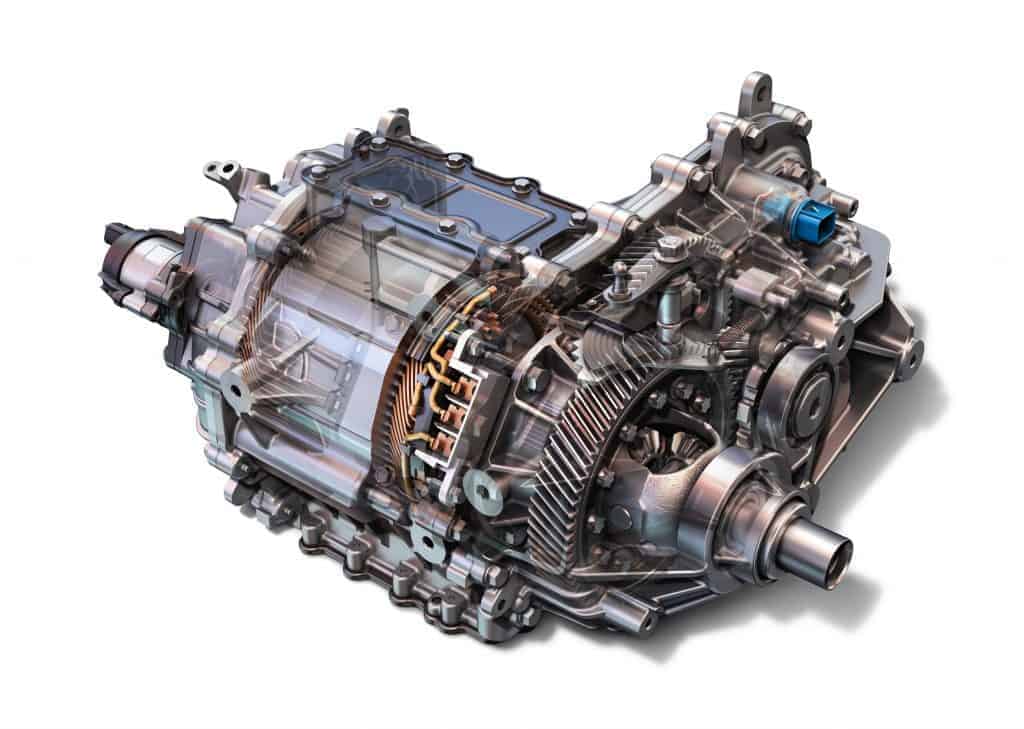
Následující obrázek ukazuje části (synchronního) elektromotoru Audi. Tento typ se používá v hybridních variantách A6 a A8. Stručně si vyjmenujeme komponenty. Tyto komponenty jsou podrobně popsány v následujících odstavcích.
Rotor s permanentními magnety se začne otáčet v důsledku změny magnetického pole ve statoru. Rotor je spojen se spojkou, která může spojovat nebo odpojovat spalovací motor a elektromotor (ve spojení se spojkou (neznázorněna)) v různých provozních podmínkách. Poloha rotoru je určena resolver měřeno: tato data jsou důležitá pro ovladače IGBT k ovládání cívek statoru ve správný čas.
Elektromotor s permanentními magnety lze ovládat jak stejnosměrným (stejnosměrným napětím), tak střídavým (střídavým napětím).
Synchronní motor je jedním z nejčastěji používaných elektromotorů v hybridních nebo plně elektrických vozidlech. Tento typ elektromotoru se skládá ze statoru s vinutím a rotoru s několika permanentními magnety. Rotor se otáčí stejnou rychlostí jako magnetické pole statoru. Synchronní motor lze ovládat následovně:
- AC: řízeno sinusovým signálem (střídavý proud).
- DC: řízené čtvercovým nebo lichoběžníkovým signálem (stejnosměrný proud)
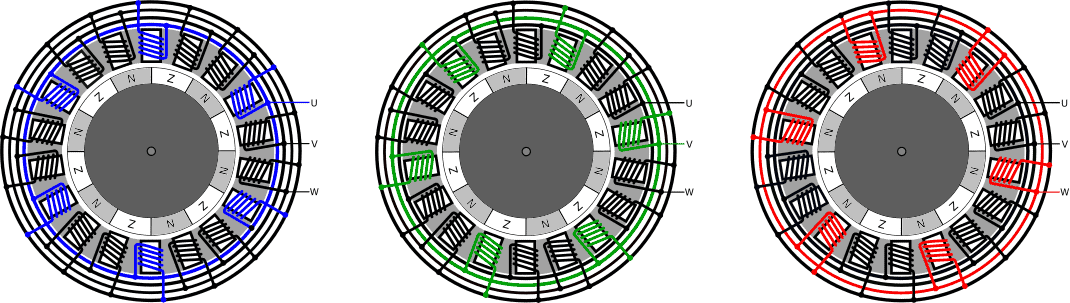
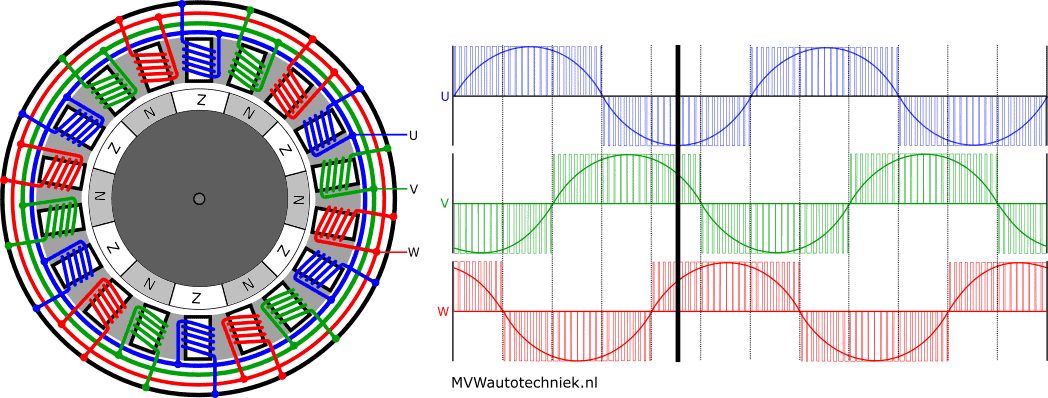
Stator synchronního motoru je tvořen třemi skupinami statorových cívek: U, V a W. Každá skupina obsahuje tři sady šesti cívek zapojených paralelně, které jsou rozmístěny po celém obvodu statoru. Každá třetí cívka patří do stejné série.
- U-cívky: modré
- V-cívky: zelená
- W cívky: červená
Rotor obsahuje několik permanentních magnetů. Střídavým buzením cívek ve statoru vzniká rotující magnetické pole. Rotor sleduje točivé pole, a proto se otáčí.
AC řízení synchronního motoru:
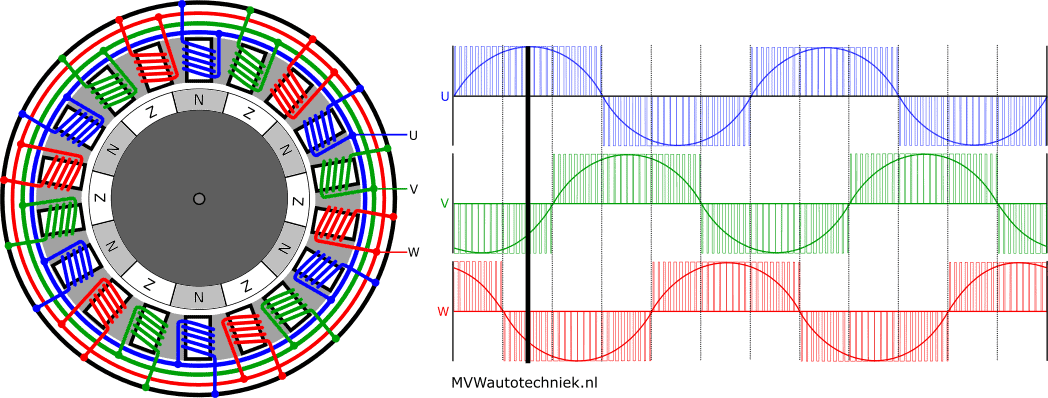
Střídavé řízení využívá frekvenčně řízené řízení nebo sinusovou komutaci. Cívky statoru jsou napájeny střídavým třífázovým sinusovým napětím pro otáčení rotoru.
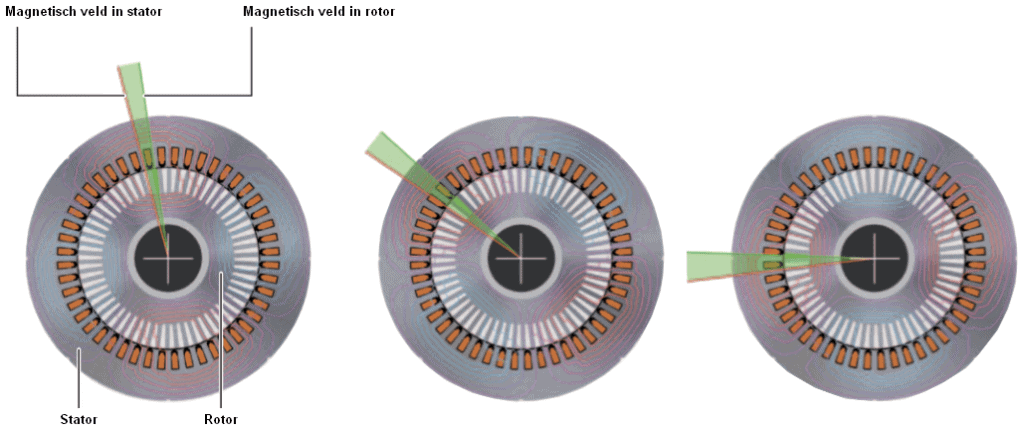
Obrázek níže ukazuje polohu rotoru s maximálně vybuzenou U-cívkou. V důsledku magnetického pole se severní póly umístily přímo proti napájeným U-cívkám. Kurzor v grafu u elektromotoru ukazuje v tu chvíli ovládání cívek.
Pro vaši informaci: rotor ve vysvětlení se při ovládání statorových cívek otáčí ve směru hodinových ručiček.
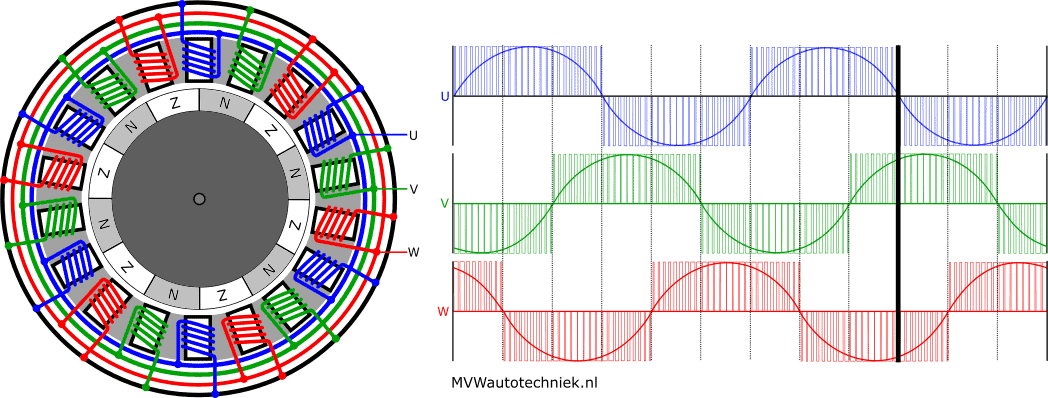
Na následujícím obrázku je sinusovka, tedy střídavý proud U-cívkou, maximálně negativní. Během tohoto řízení jsou jižní póly rotoru přímo proti vybuzeným (U) statorovým cívkám.
Mezi severním a jižním pólem rotoru je ve skutečnosti malá vzduchová mezera. Při změně z jižního na severní pól se mění směr proudu v U-cívce. Dále:
- Proud V-cívkou (zelená) je téměř maximálně kladný; severní pól je také téměř naproti cívce.
- Proud W cívkou byl maximálně záporný a roste. Jižní pól se otočil kolem cívky.
Abyste získali představu o tom, jak proud teče, níže uvedená animace ukazuje rotaci rotoru v důsledku střídavého proudu.
Střídavý elektromotor (asynchronní motor s klecovou klecí):
Klec nakrátko neboli elektromotor s kotvou nakrátko je asynchronní motor. Rozdíl mezi synchronním motorem s permanentními magnety a asynchronním motorem je v rotoru: jedná se o buben z měkkého železa s vodiči v podélném směru. Rotor běží asynchronně se statorem, což znamená, že mezi rotorem a magnetickými otáčkami statoru je rozdíl otáček. Stator je úplně stejný.
Rotor asynchronního elektromotoru se skládá z cívek nakrátko; cívky U, V a W jsou vzájemně spojeny na jedné straně. Když je rotor v točivém poli statoru, vytváří se v cívkách rotoru indukční napětí. Protože jsou cívky rotoru vzájemně zkratovány, protéká jimi proud. Tento proud způsobí, že rotor generuje magnetické pole a vytváří točivý moment. Protože činnost asynchronního elektromotoru je založena na indukčním zákonu, nazýváme jej také indukčním motorem.
Dodávaný moment ovlivňuje skluz mezi rotujícím magnetickým polem ve statoru a otáčkami rotoru.
Asynchronní motor má oproti synchronnímu motoru řadu výhod a nevýhod.
Výhody:
- relativně jednoduchý, robustní a levný rotor;
- vysoký točivý moment při nízkých otáčkách.
Nevýhody:
- nižší hustota výkonu (na hmotnost) a účinnost (účinnost). Proudy ve zkratovaných rotorových cívkách způsobují další ztráty rotoru;
- rychlost nelze přesně řídit, protože závisí na zatížení. To samo o sobě nemusí být nevýhodou: s dobrým řídicím systémem lze regulovat i otáčky asynchronního motoru;
- vysoký startovací proud.
Poloha rotoru a otáčky asynchronního motoru se měří pomocí a snímač polohy rotoru. Hallovy snímače často poskytují alespoň čtyři impulsy na otáčku rotoru pro přenos polohy a rychlosti rotoru. Tomuto typu snímače polohy rotoru neříkáme resolver, jako je tomu u synchronního motoru.
Na rozdíl od synchronního motoru není nutné, aby snímač polohy rotoru znal polohu rotoru v klidu. Při otáčení je důležitá poloha rotoru: je třeba dbát na to, aby skluz mezi magnetickým točivým polem a rotorem nebyl příliš velký. Když se rotující pole pohybuje příliš rychle, může nastat situace, kdy se rotor bude chtít náhle otočit jiným směrem. Síly, které vznikají, mohou být pro mechanické a elektrické součásti katastrofální.
Někteří výrobci také volí použití asynchronního motoru resolver uplatnění. Důvod je mi neznámý. V každém případě je resolver extrémně přesný jak při stání, tak při běhu, což může preciznímu ovládání prospět.
Mapa účinnosti synchronního a asynchronního elektromotoru:
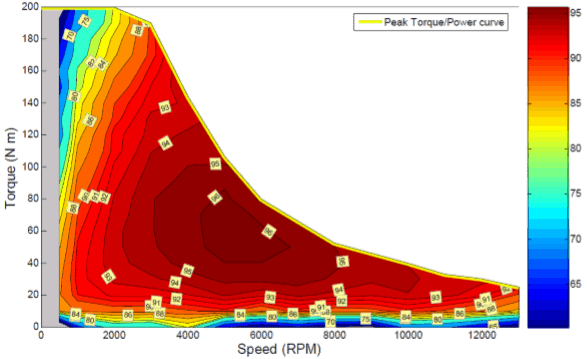
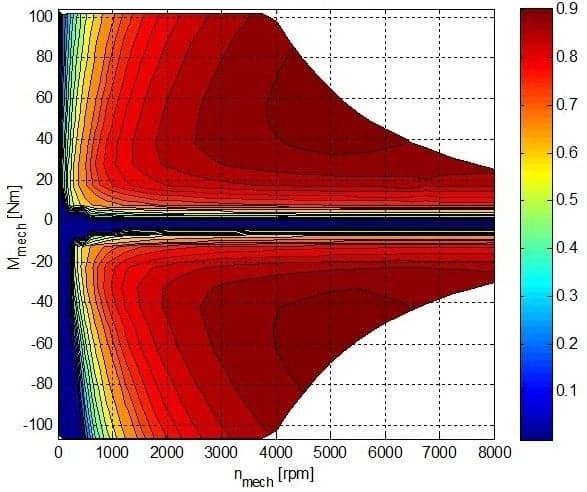
Obrázky níže ukazují účinnost synchronního elektromotoru (vlevo) a asynchronního elektromotoru (vpravo).
- Synchronní elektromotor je velmi účinný. Účinnost je nad 90 % na velké ploše, se špičkovými hodnotami až 96 %. Od 2000 otáček za minutu dochází k zeslabování pole, což způsobuje snížení maximálního točivého momentu.
- Asynchronní motor má výrazně nižší účinnost než synchronní motor při nižších otáčkách.
Související stránky: