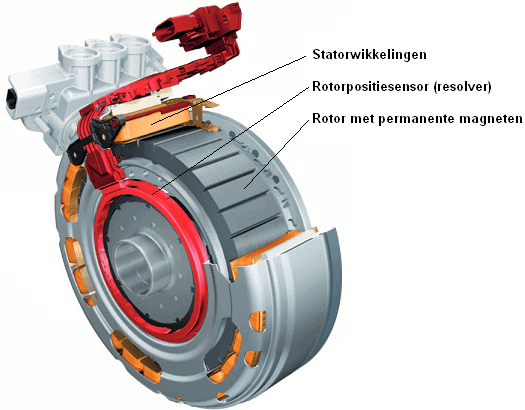
Предговор: За функционирането на синхронен електродвигател от съществено значение е правилното промиване през инвертор се контролират. За да се определи коя бобина (U, V или W) трябва да бъде захранена, инверторното ECU отчита позицията на ротора, която се измерва от сензора за позиция на ротора, наричан още „резолвер“.
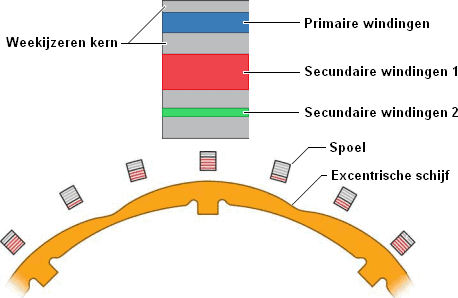
Резолверът се състои от външен пръстен с множество намотки от вътрешната страна на въртяща се ексцентрична плоча. Разстоянието между ексцентричната плоча и намотките постоянно се променя, докато се върти.
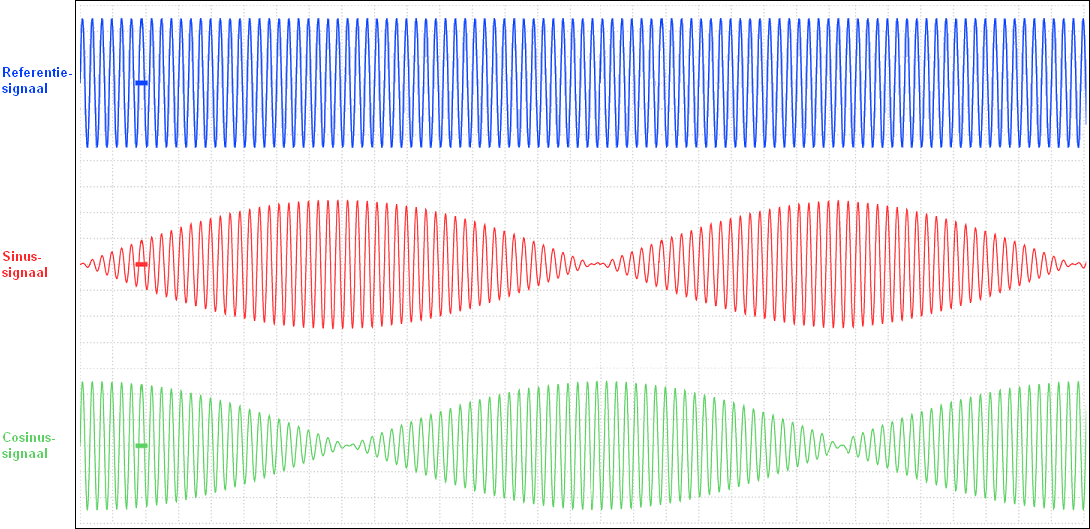
Сигнали от резолвера: ECU предоставя на резолвера референтен сигнал. Въздушната междина между бобината и ексцентрика създава високо или ниско синусоидално променливо напрежение. При висока амплитуда на червения или зеления синусоидален сигнал (вижте фигурата по-долу), въздушната междина между ексцентрика и намотката е малка.
Резолверът функционира както в покой, така и докато електродвигателят работи: и в двата случая ECU трябва да знае в каква позиция е роторът. Изображението по-долу показва теоретичните сигнали. В действителност честотата е много по-висока, така че промяната в амплитудата на синусовите и косинусовите сигнали е ясно видима.
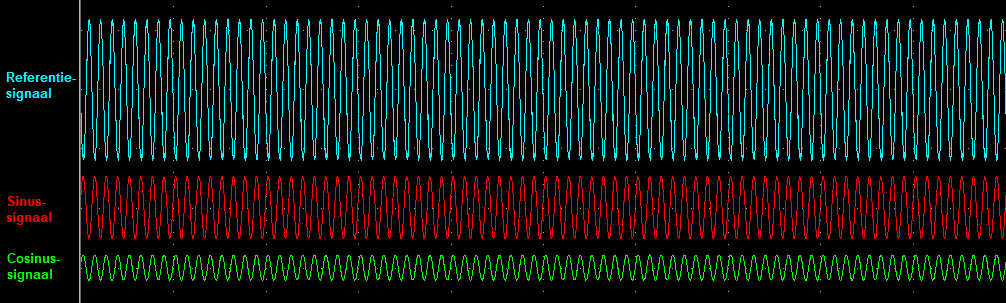
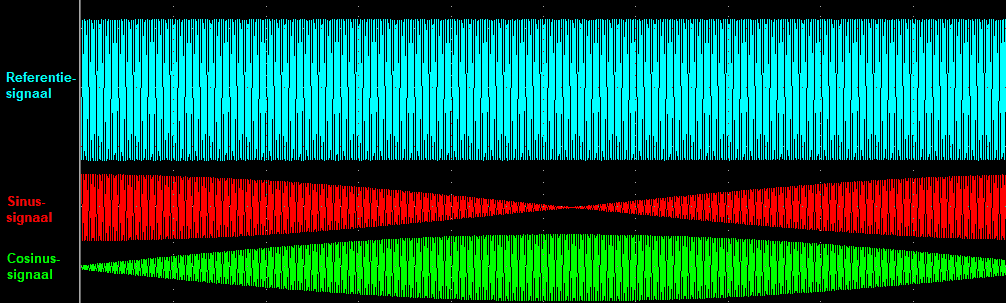
Двете изображения по-долу показват действително измерване на резолвер. Тук също виждаме референтния сигнал в горната част и синусовите и косинусовите сигнали отдолу. Първото изображение е в застой: електродвигателят не работи. Височината на синусоидалния сигнал и косинусоидалния сигнал остава постоянна. Въз основа на нивото на това променливо напрежение, ECU знае къде е роторът, когато е неподвижен.
Резолвер сигнали в покой
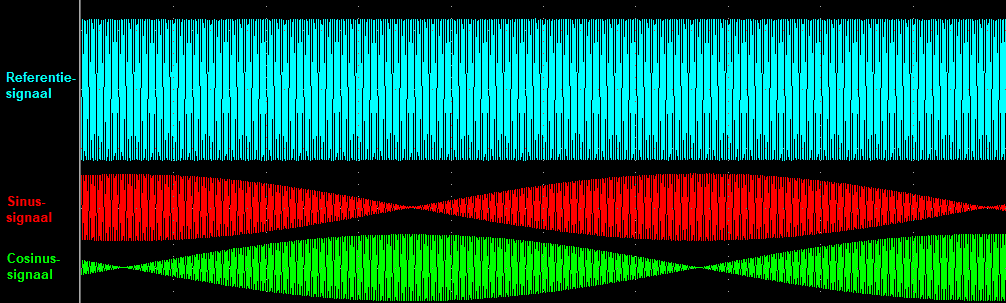
В следващите две изображения времето за разделяне е намалено. Честотата на референтния сигнал на резолвера е непроменена, но е измерена за по-дълъг период от време в измерването. В резултат виждаме, че амплитудите на синусовите и косинусовите сигнали се променят ясно. Първото изображение е измерено при ниска скорост на ротора, а второто при повишена скорост. С увеличаване на скоростта честотата на синусоидалните и косинусовите сигнали се увеличава (повече сигнали за единица време), но амплитудата (нивото на променливото напрежение) остава постоянна.
Резолвер сигнали: ниска скорост
Резолвер сигнали: скоростта е увеличена
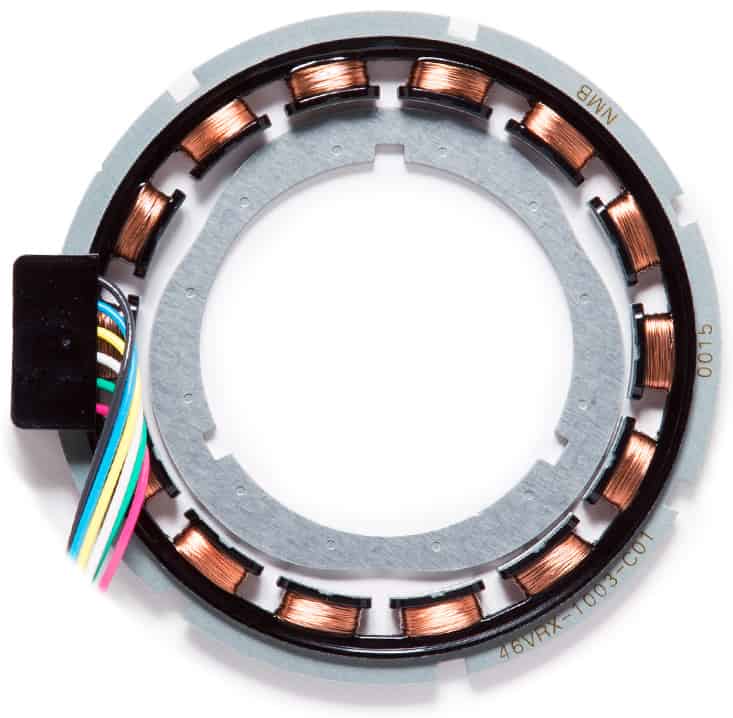
Компоненти на резолвера: Резолверът на VW E-Golf съдържа 30 намотки, свързани последователно. Всяка бобина в резолвера се състои от сърцевина от меко желязо с три различни намотки: първична, вторична 1 и вторична 2.
Първичната намотка (синя) се захранва с високочестотно променливо напрежение.
Броят на вторичните навивки (1 червен, 2 зелени) е различен за всяка бобина.
Когато гърбицата на ексцентричната плоча се движи по бобината, индуктивността във вторичните намотки се усилва. Поради броя на навивките на вторичните намотки 1 и 2 във всяка намотка, това също води до различни напрежения във вторичните намотки. ECU в инвертора може да изчисли позицията на ротора въз основа на напреженията на вторичните намотки 1 и 2.
Регулирането на резолвера върху ротора е много прецизно: много производители предписват, че целият електродвигател трябва да се смени, ако възникнат проблеми с резолвера. След (случайно) разглобяване на резолвера или разхлабване на болтовете от външната страна на корпуса на електрическия мотор, резолверът вече не може да бъде сглобен отново правилно. И в този случай много производители предписват смяна на електродвигателя.
Точната позиция на ротора на a синхронен двигател трябва да се знае в спряло положение и по време на шофиране. Ако сензорът е дефектен, автомобилът вече не може да се движи.
От асинхронен двигател от друга страна, не е необходимо наблюдение на позицията на ротора. Сензорът за положение на ротора излъчва четири импулса на оборот на ротора. Това измерване следи максималното количество приплъзване между въртящото се магнитно поле между статора и ротора. Сензорът на Хол често се използва като сензор. Сензорът на Хол предава импулси към ECU, когато роторът се върти, но не може да извърши измерване в покой, за разлика от резолвера на синхронния двигател. Производителите също понякога избират да използват резолвера на синхронния двигател като сензор за положение на ротора.