Преобразуване на напрежението на аналоговия сензор в цифрово съобщение
Преобразуване на сигнал от импулсен генератор в цифрово съобщение
Изходни сигнали
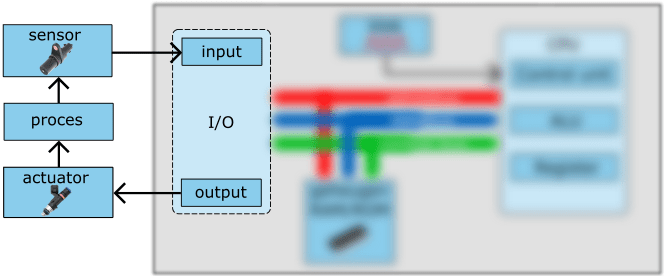
Предговор: В повечето случаи електрическите сигнали от сензорите трябва да бъдат коригирани, преди да бъдат представени на процесора. Изпълнителните механизми се управляват от другата страна на компютъра. Това често са индуктивни вериги, които често комутират големи токове. Хардуерът за регулиране на сензорните сигнали и токовете на задвижването се нарича интерфейсни вериги. Интерфейсна схема осигурява преобразуването на аналогово в цифрово напрежение.
сензори предават напрежение с нисък ток. Интерфейсната верига преобразува напрежението в цифрова стойност (0 или 1). Силата на тока е ниска със сигнал от сензор;
Актуатори изискват по-висок ток. Към управляващи изпълнителни механизми, са разположени в ECU под формата на (комбинация от) транзистори или FET, които също се наричат „драйвери“. Ще обсъдим това по-подробно в раздела „изходни сигнали“.
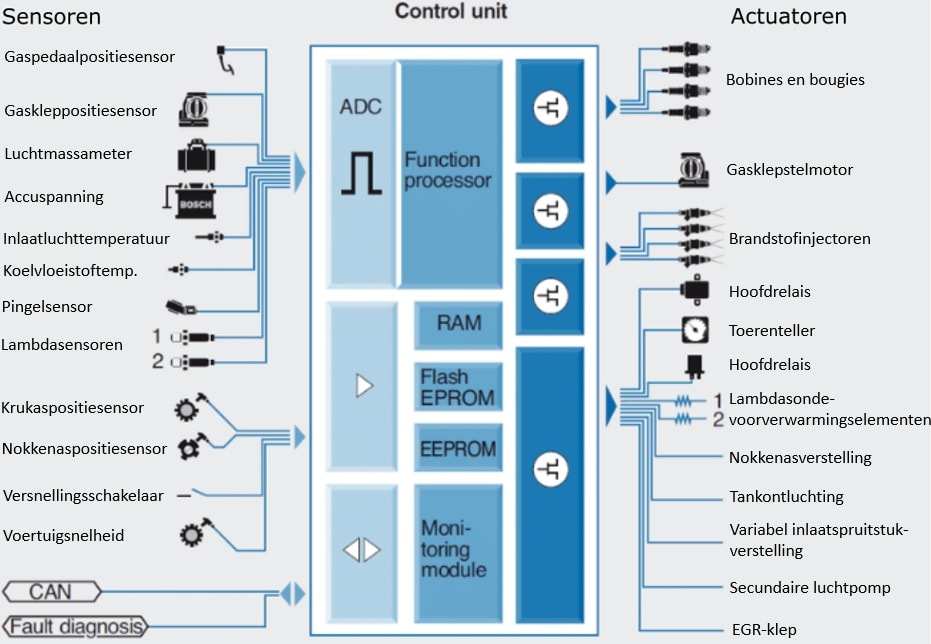
Изображението по-долу показва сензорите и изпълнителните механизми на системата за управление на (бензинов) двигател. Горната група сензори (от сензора за положение на педала на газта до ламбда сензорите) попадат в категорията „аналогови“. Това означава, че входящите сензорни напрежения трябва първо да бъдат дигитализирани в ADC (аналогово-цифров преобразувател). Долната група сензори (сензорът за положение на коляновия вал към сензора за скоростта на автомобила) вече подават сигнала си цифрово. Сигналите за включване и изключване или блоковите напрежения се прилагат директно към процесора.
Актуаторите отдясно се управляват от изходно стъпало. Изходният етап, наричан още драйвер, се състои от верига от няколко транзистора за генериране на използваемо напрежение и ток от управляващ импулс от компютъра за управление на задвижващия механизъм.
Система за управление на двигателя със сензори (вляво) и изпълнителни механизми (вдясно)
Транзисторна транзисторна логика (TTL): Процесора работи с напрежение от 5 волта. Следователно входното и изходното напрежение са ограничени до диапазон от 0 до 5 волта (ниво TTL, съкратено от Transistor Transistor Logic). За сигнали, които се отклоняват от това ниво на напрежение, се извършва настройка в интерфейсна верига.
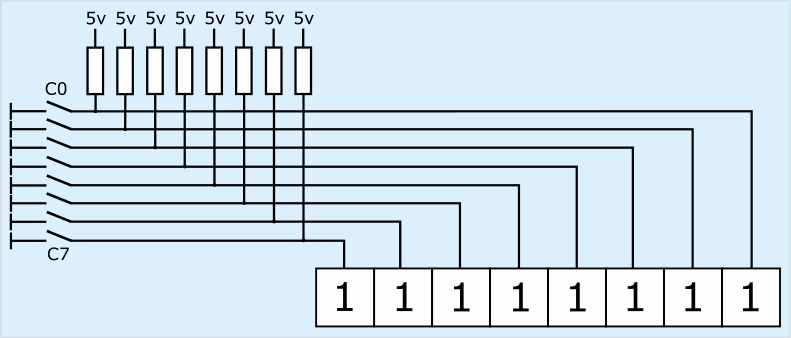
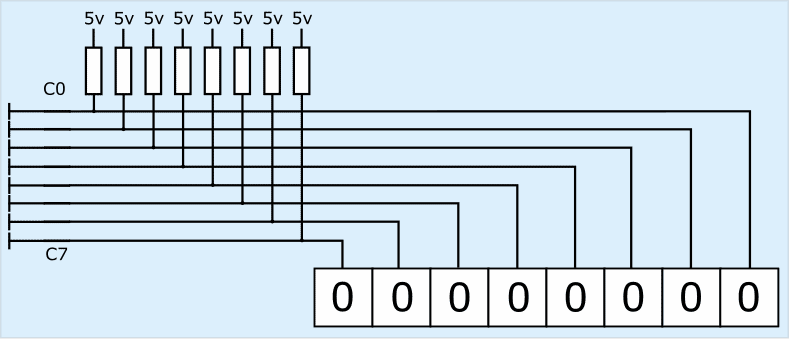
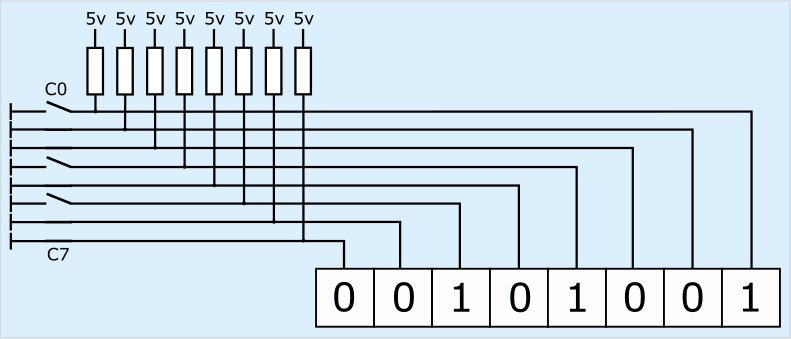
Изображенията по-долу показват как се формира 1 или 0 от позиция на превключвател. С помощта на издърпващ резистор напрежението от 5 волта осигурява a логично 1 на входа на процесора, когато ключът е отворен. След това напрежението през изтеглящия резистор не е свързано към земята. Когато превключвателите се затворят, възниква спад на напрежението в издърпващия резистор. Напрежението от 0 волта на входа на процесора се вижда като логично 0.
Всички ключове са отворени: 11111111 на входа на процесора
Всички ключове са затворени: 00000000 на входа на процесора
Комбинация от отворени и затворени превключватели създава серия от единици и нули. На фигурата 8-битовото съобщение до процесора е: 00101001.
При 8-битов процесор осемте бита се четат едновременно на цикъл. По време на следващия цикъл, който се извършва по време на следващото „тактакане“ на часовника (вижте системна шина на страницата за работата на ECU) следва последователност с осем нови бита.
Отворени и затворени ключове: 00101001 на входа на процесора
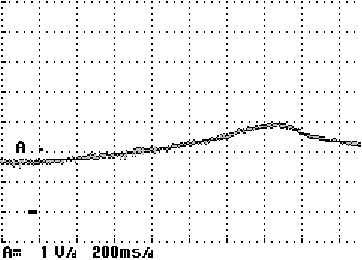
Преобразуване на напрежението на аналоговия сензор в цифрово съобщение: Цифровите входни сигнали се обработват директно от процесора. Аналоговите сигнали първо се преобразуват в цифров сигнал в A/D преобразувателя. Като пример ще вземем аналоговата крива на напрежението на датчик за турбо налягане:
на празен ход напрежението е приблизително 1,8 волта;
при ускорение напрежението се повишава до почти 3 волта.
Промяната на напрежението не може да се обработи директно в процесора. Първо, измереното напрежение трябва да се преобразува в десетична стойност (0 до 255).
С диапазон от 0 до 5 волта и десетична стойност от 0 до 255 (т.е. 256 възможности). Едно просто изчисление показва, че ако разделим 5 волта на 256 възможности, могат да се направят стъпки от 19,5 mV (0,0195 волта).
Горният пример показа развитието на напрежението спрямо времето на сензор за турбо налягане. Кривата на напрежението на датчика за температура и сензора за положение на педала на газта е една и съща, само че в различна времева рамка: загряването на охлаждащата течност отнема повече време, отколкото навиването на турбото.
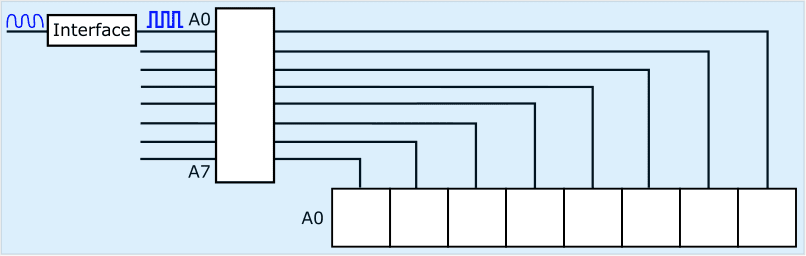
По-рано в този раздел има изображение, показващо категория аналогови сигнали. Това показва, наред с други неща, температурния сензор и сензора за положение на педала на газта. Аналоговото напрежение се преобразува в 8-битова единица информация в A/D преобразувателя. Много процесори с множество входни изводи имат само един A/D преобразувател. Множество аналогови сигнали се комбинират в един сигнал чрез мултиплексиране.
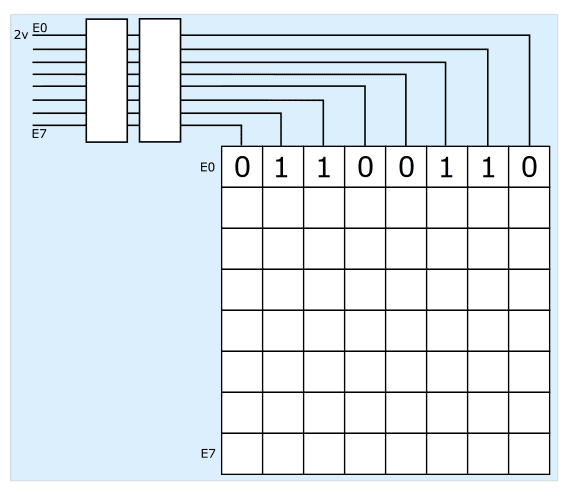
В този пример виждаме A/D преобразувател с осем входа. На пин 0 има напрежение от 2 волта. Пинове E1 до E7 могат да бъдат захранвани с напрежение едновременно. Те се преобразуват един по един в цифрово съобщение чрез мултиплексиране.
Напрежението от 2 волта се преобразува в двоична стойност. Със следната формула можем да преобразуваме аналоговото напрежение в десетична стойност и след това да го преобразуваме в двоична стойност:
2v / 5v * 255d = 102d
Тук разделяме входното напрежение (2v) на максималното напрежение (5v) и го умножаваме по максималната десетична стойност (255).
Като направим някакво изчисление или изпълним хитър трик, можем да преобразуваме десетичното число 255d в двоичната стойност 01100110. Вижте страницата за това: двоичен, десетичен, шестнадесетичен.
8 битов A/D преобразувател
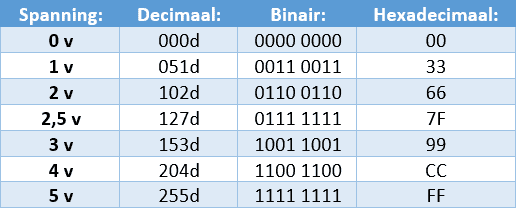
Следващата таблица показва десетичните, двоичните и шестнадесетичните стойности, свързани с различни напрежения.
При четене на живи данни може да се покаже десетичната, двоичната или шестнадесетичната стойност на сигнала на сензора.
Сигнал за напрежение <0,5 волта (025d) се счита за късо съединение към земята;
Ако сигналът се повиши над 4,5 волта (220d), компютърът превежда това като късо съединение с плюс.
Напрежение в десетични, двоични и шестнадесетични стойности
Преобразуване на сигнали от импулсен генератор в цифрово съобщение: Сигналите от генераторите на импулси, включително индуктивния сензор за положение на коляновия вал, всъщност са сигнали за включване и изключване, които възникват, след като зъбците на импулсното колело са се преместили покрай сензора. Променливото напрежение на сензора трябва първо да се преобразува в правоъгълно напрежение, преди сигналът да бъде представен на процесора.
На фигурата виждаме синусоидално променливо напрежение от лявата страна на интерфейса. В интерфейсната електроника това променливо напрежение се преобразува в напрежение с правоъгълна вълна. След това това блоково напрежение се отчита от блока на таймера/брояча: когато импулсът е висок, броячът започва да брои и спира да брои, когато импулсът отново стане висок. Броят на преброяванията е мярка за времето на периода. честота на сигнала.
Преобразуване на сигнала от генератора на импулси в цифров сигнал с блока таймер/брояч
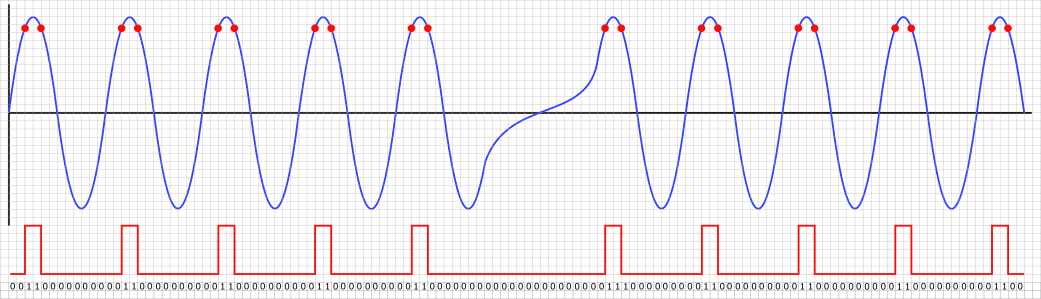
На изображението по-долу виждаме сигнал от индуктивния сензор на коляновия вал с червени точки в горните страни. Червените точки са настроени на напрежение за увеличаване (логическа 1) или намаляване (логическа 0) на блоковото напрежение. Обяснението продължава под това изображение.
Синусоидално променливо напрежение и дигитализиран сигнал без хистерезис
Напрежението на сензора обаче никога не е напълно чисто. Винаги ще има малка флуктуация в профила на напрежението. В този случай интерфейсната електроника може неправилно да посочи това като логическа 0, докато всъщност трябва да е 1.
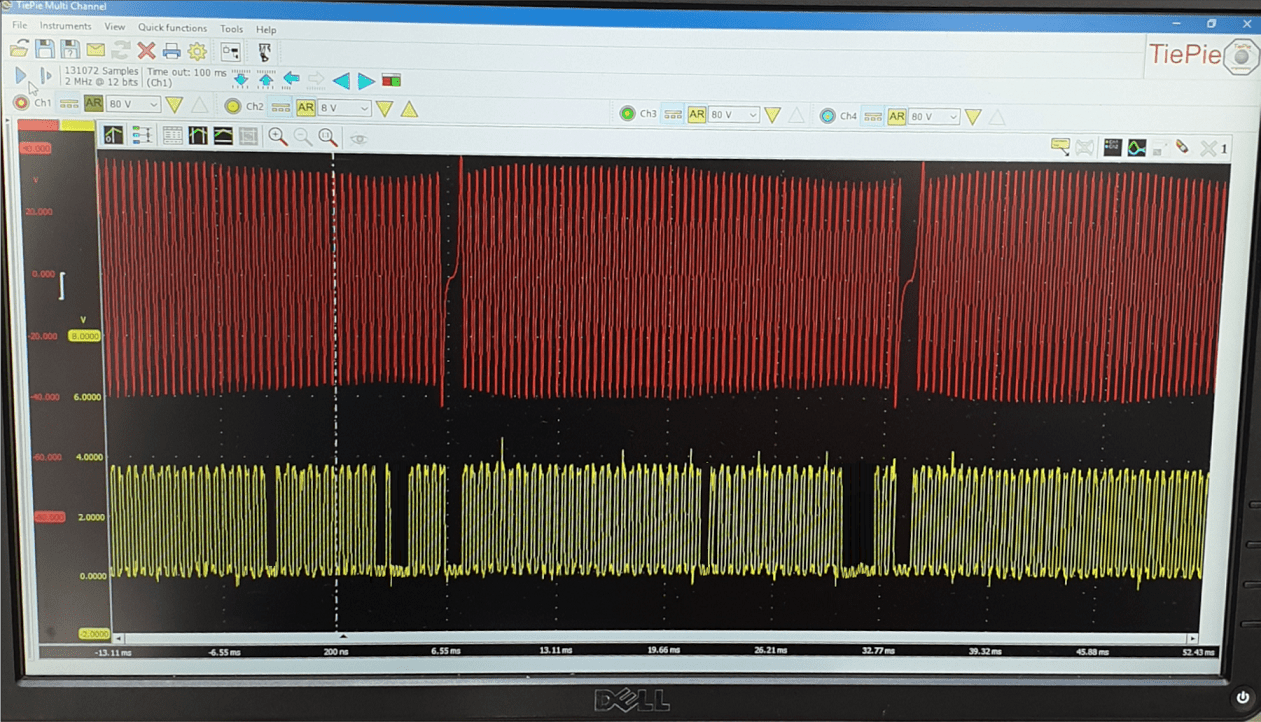
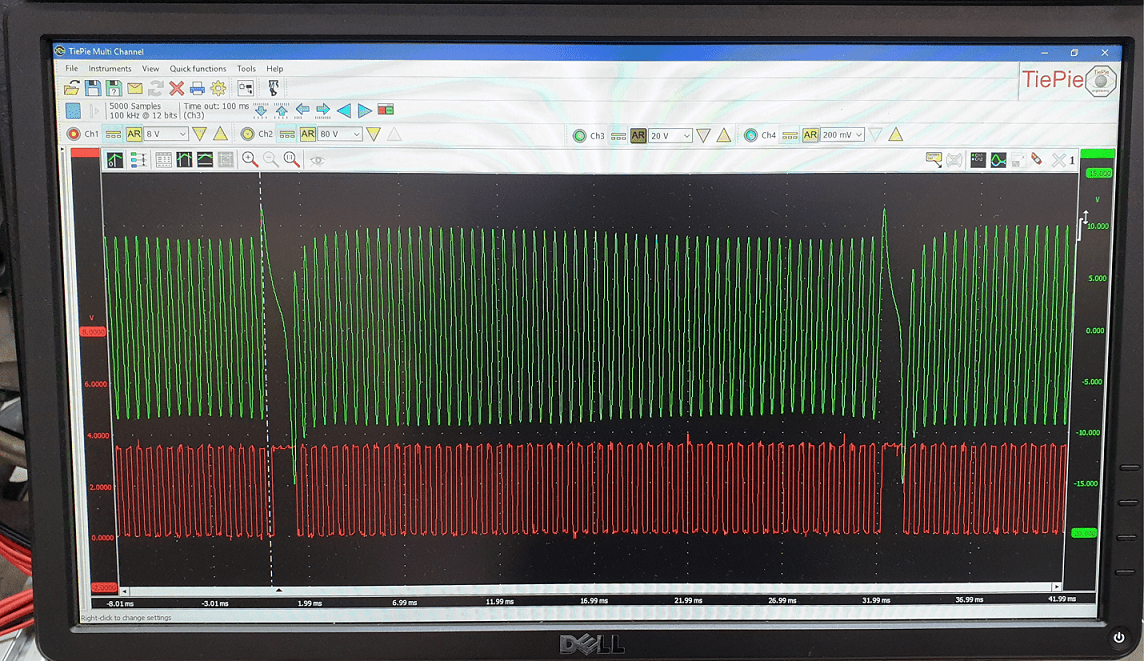
Изображението на обхвата по-долу е записано, докато се изпълнява Проект BMW Megasquirt. Изображението на обхвата показва цифровизацията (жълто) на индуктивния сигнал на коляновия вал (червено). Изображението ясно показва, че има липсващи импулси в сигнала на жълтия блок, докато в този момент липсващ зъб не преминава в сигнала на коляновия вал.
Нечистият цифров сигнал съдържа грешки: това е липсваща информация
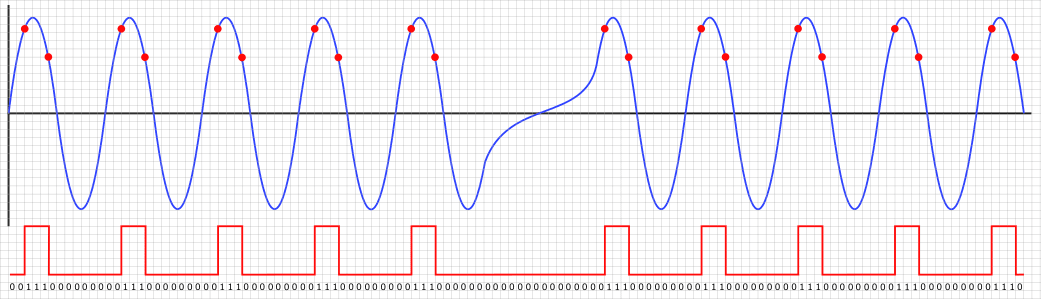
За да се гарантира, че малките колебания в профила на напрежението няма да причинят неправилна интерпретация от ECU, е вграден така нареченият хистерезис. Хистерезисът е разликата между нарастващия и спадащия ръб на профила на напрежението. На изображението по-долу виждаме, че червените точки на нарастващите ръбове са с по-високо напрежение от червените точки на падащите ръбове. По този начин можем да сме сигурни, че малките колебания в сигнала не влияят на цифровото преобразуване.
В първия параграф, където започнахме за преобразуването на импулсния сигнал в цифров сигнал, вече беше споменато, че честотата на сигнала се определя на базата на времето между два нарастващи фронта на квадратния сигнал. В тези примери може ясно да се заключи, че хистерезисът наистина влияе върху ширината на квадратния сигнал, но няма влияние върху времето между нарастващите фронтове и следователно няма влияние върху честотата на сигнала.
Дигитализиран импулсен генераторен сигнал с хистерезис
При правилно зададен хистерезис, синусоидалният сигнал се преобразува правилно в използваемо правоъгълно напрежение, като само множеството логически са на местата, където минава липсващият зъб.
Моля, имайте предвид, че докато настройвате MegaSquirt ECU, настройките бяха променени, включително задействане на нарастващите и падащите линии. В резултат на това при преминаване на липсващия зъб в първия пример напрежението е 0 волта, а в изображението на обхвата по-долу напрежението е 5 волта.
Генератор на импулсен сигнал с чисто и правилно правоъгълно напрежение
Изходни сигнали: Изходните сигнали се състоят от цифрови импулси за включване/изключване с диапазон на напрежението между 0 и 5 волта (TTL ниво) с много нисък ток. Актуаторите обаче изискват управление с по-високи нива на напрежение и токове. Сигналите за включване/изключване могат да бъдат модулирани по широчина на импулса (PWM), където ширината на импулса може да варира при постоянна честота.
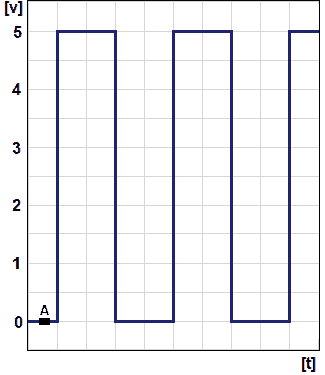
Следващата фигура показва напрежение с квадратна вълна на ниво TTL като функция на времето. The мито цикъл от този PWM сигнал е 50%.
Необходими са драйвери за управление на изпълнителни механизми. С цифровия изходен сигнал необходимият ток може да бъде постигнат с драйвер. В следващия раздел ще обсъдим драйверите.
Пример: PWM сигнал
Намираме драйвери във всяко ECU и в някои задвижващи механизми като DIS бобини за запалване. Драйверът се нарича още изходен етап или мощен транзистор. Драйверът прави възможно преобразуването на изходни сигнали на ниво TTL: 0 до 5 волта, с нисък ток от 1 mA от ECU до напрежения до 14 волта и токове до приблизително 10 A.
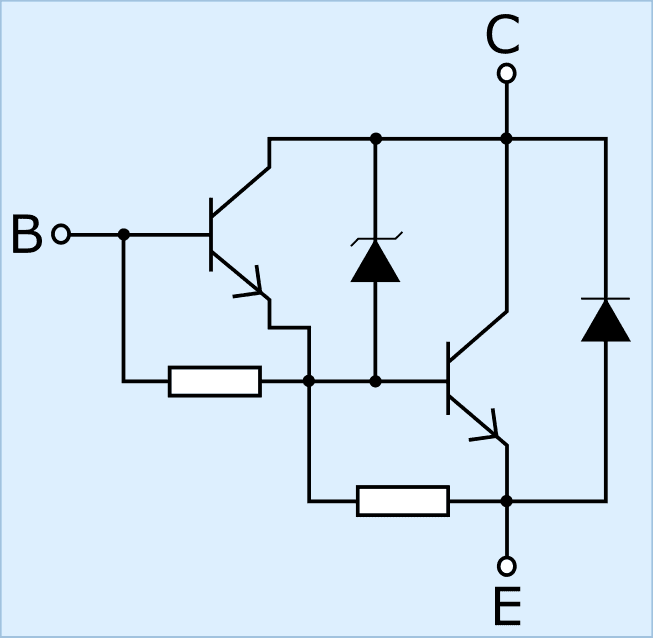
Един драйвер може да свърже няколко транзистори съдържат. Ние наричаме такъв транзистор "Транзистор Дарлингтън“. Следните изображения показват следните вериги:
Схема на верига Дарлингтън с два транзистора за управление на запалителната бобина (източник: лист с данни BU941ZR).
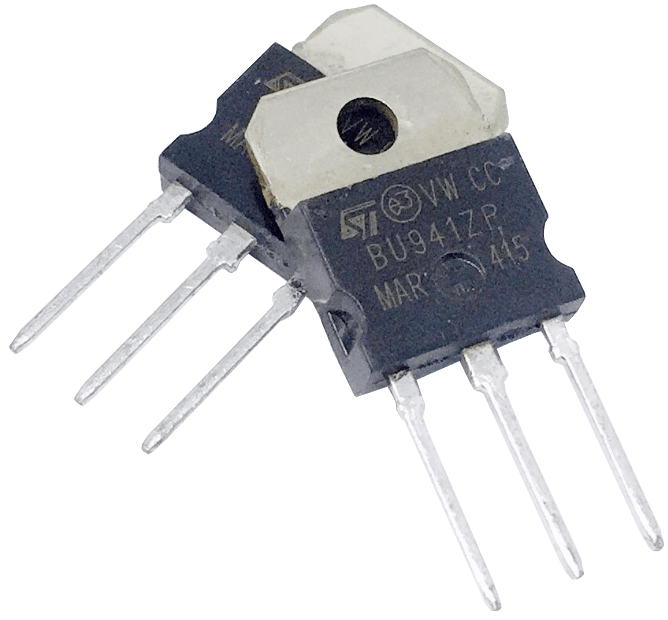
Два транзистора, всеки със схема Дарлингтън (BU941ZR)
ИС на драйвери със схеми на Дарлингтън и допълнителна електроника за, наред с други неща, температурна защита и обратна връзка към микропроцесора.
1. Писта Дарлингтън
2. Транзистори Дарлингтън (2x)
3. Интегрални схеми на драйвери с множество схеми на Дарлингтън
На страницата: методи за управление на изпълнителни механизми по-подробно е разгледано управлението на пасивни, активни и интелигентни изпълнителни механизми посредством (мощен) транзистор или FET.