Предмети:
- въведение
- AC електродвигател (синхронен, с постоянни магнити)
- AC управление на синхронния двигател
- Електрически двигател с променлив ток (асинхронен двигател с катерица)
- Карта на ефективността на синхронен и асинхронен електродвигател
Предговор:
Електрическият двигател се използва за задвижване на хибридно или изцяло електрическо превозно средство. Електрическият мотор преобразува електрическата енергия (от батерията или удължителя на обхвата) в движение за задвижване на колелата. Освен това електрическият мотор може да преобразува кинетичната енергия в електрическа енергия при спиране на двигателя: регенеративно спиране. В този случай електродвигателят функционира като динамо. Поради тези две функции ние наричаме електродвигателя също „електрическа машина“.
Вариантите за поставяне на електродвигателя в хибридно превозно средство са:
- При двигател с вътрешно горене, където трансмисията се осъществява чрез мулти-ремък или директно през коляновия вал;
- Между двигателя и скоростната кутия: входният вал на скоростната кутия се задвижва от електрическия мотор;
- Интегриран в скоростната кутия;
- На диференциала;
- На главините на колелата (двигател на главината).
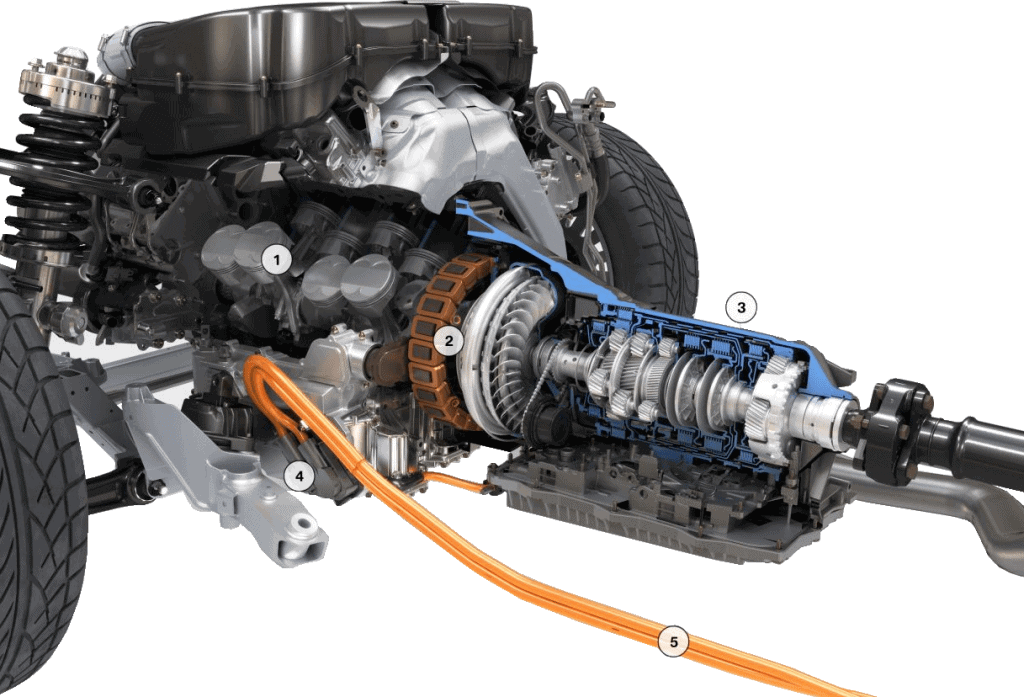
Електрическият мотор на изцяло електрически автомобил често се монтира на задната ос. Изображението по-долу показва електрическия мотор с инвертора в цилиндричен корпус и крайно задвижване на Tesla.

AC електродвигател (синхронен, с постоянни магнити):
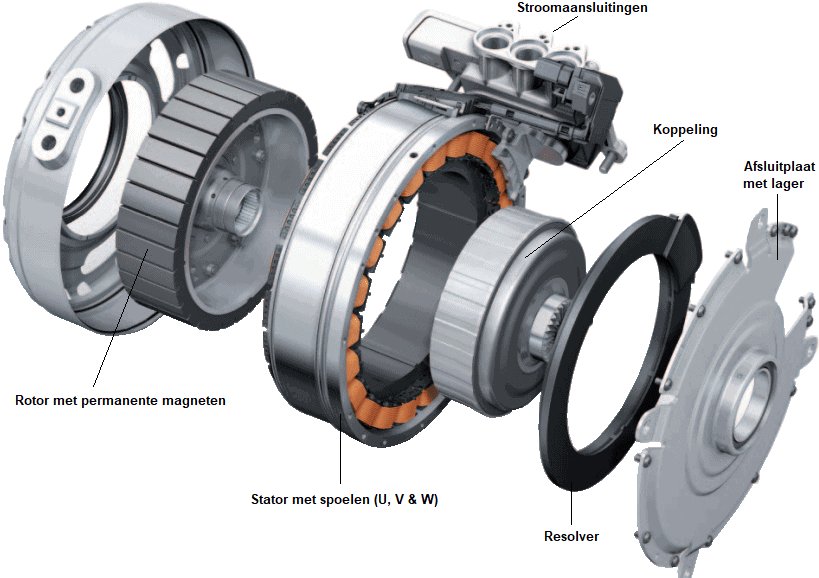
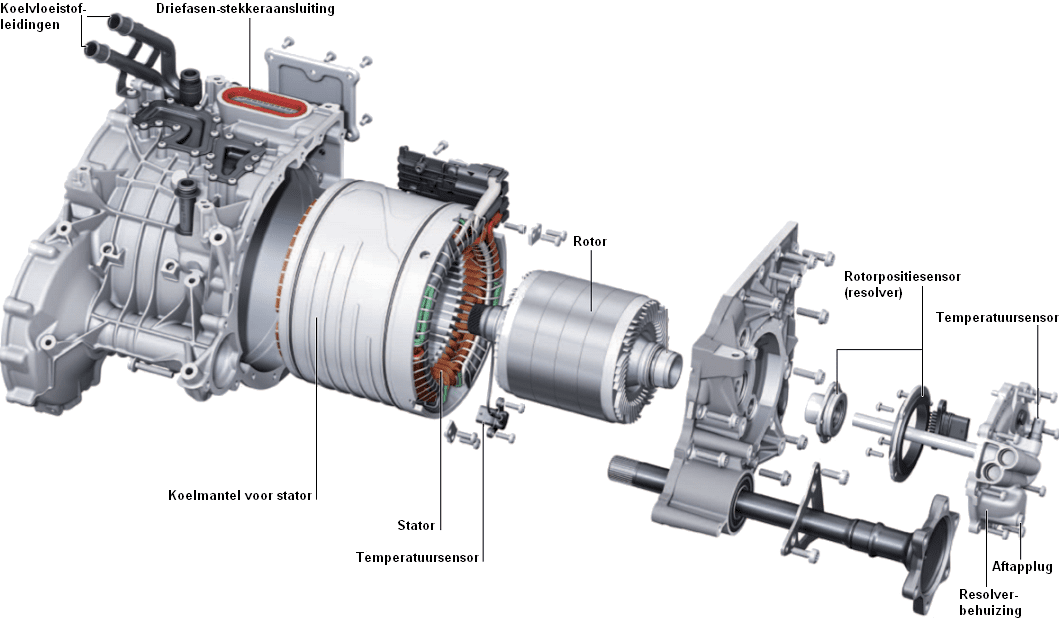
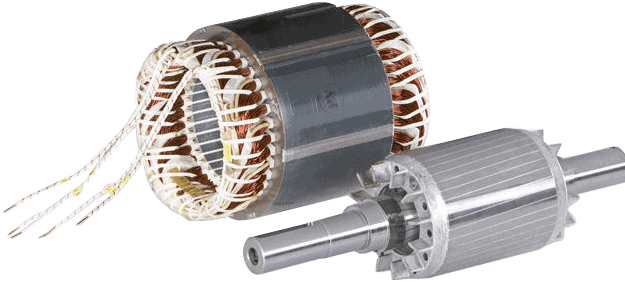
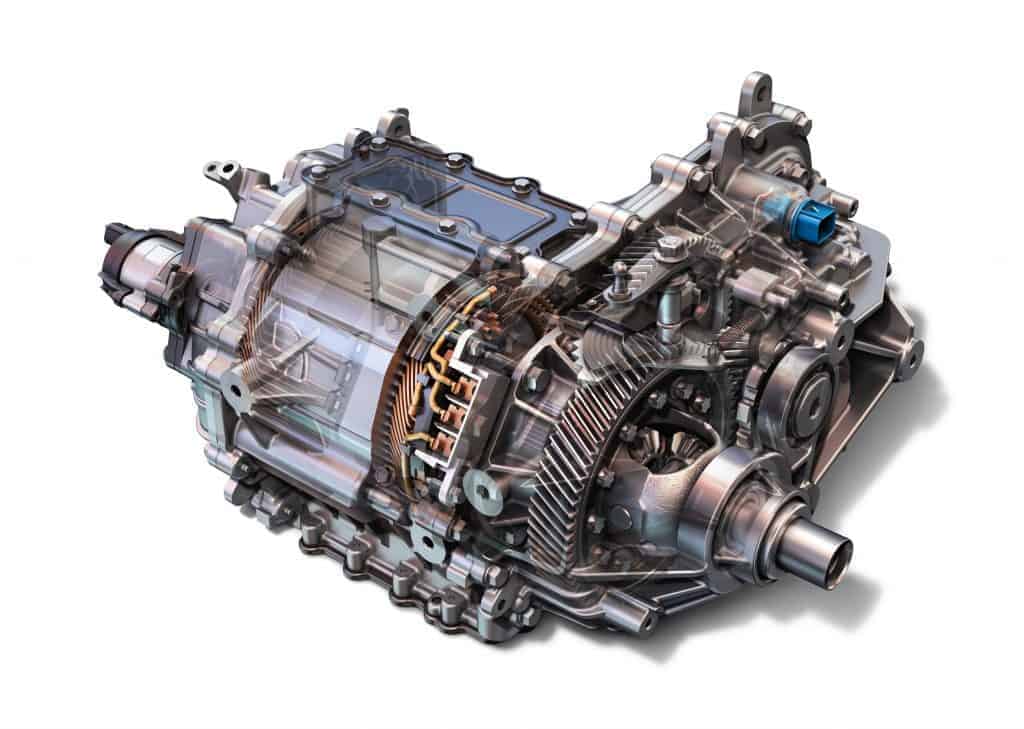
Следното изображение показва частите на (синхронен) електродвигател на Audi. Този тип се използва в хибридните варианти на A6 и A8. Ще изброим накратко компонентите. Тези компоненти са описани подробно в следващите параграфи.
Роторът с постоянни магнити ще започне да се върти в резултат на промяна на магнитното поле в статора. Роторът е свързан към съединителя, който може да свързва или изключва двигателя с вътрешно горене и електрическия мотор (във връзка със съединителя (не е показан)) при различни работни условия. Положението на ротора се определя от резолвера измерени: тези данни са важни за драйверите на IGBT, за да контролират намотките на статора в точното време.
Електрическият мотор с постоянни магнити може да се управлява както от DC (директно напрежение), така и от AC (променливо напрежение).
Синхронният двигател е един от най-често използваните електрически двигатели в хибридни или изцяло електрически превозни средства. Този тип електродвигател се състои от статор с намотки и ротор с няколко постоянни магнита. Роторът се върти със същата скорост като магнитното поле на статора. Синхронният двигател може да се управлява, както следва:
- AC: управлява се от синусоидален сигнал (променлив ток).
- DC: управляван с квадратен или трапецовиден сигнал (постоянен ток)
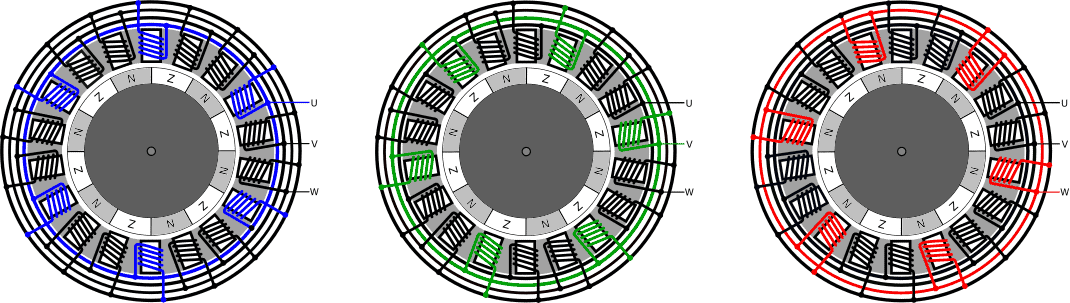
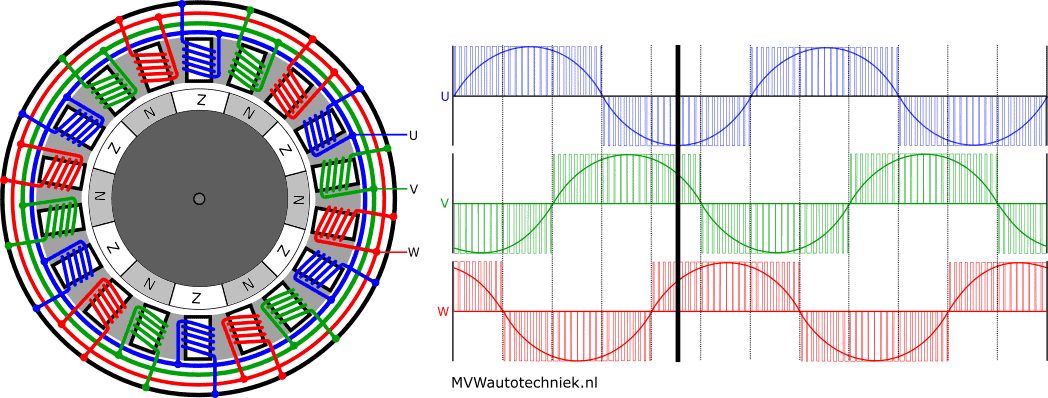
Статорът на синхронния двигател се състои от три групи статорни намотки: U, V и W. Всяка група съдържа три комплекта от шест намотки, свързани паралелно, които са разпределени по цялата обиколка на статора. Всяка трета бобина принадлежи към същата серия.
- U-бобини: сини
- V-намотки: зелено
- W намотки: червено
Роторът съдържа няколко постоянни магнита. Чрез редуващо се захранване на намотки в статора се създава въртящо се магнитно поле. Роторът следва въртящото се поле и следователно се върти.
AC управление на синхронния двигател:
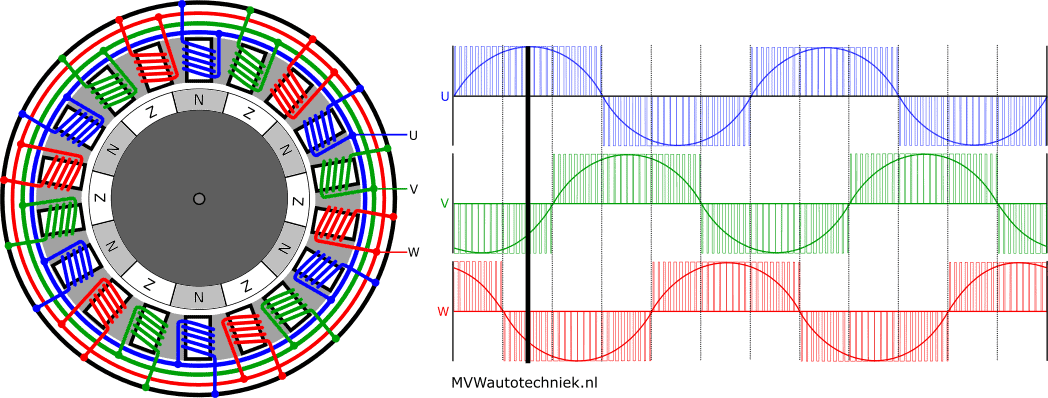
AC управлението използва честотно контролирано управление или синусоидална комутация. Бобините на статора се захранват с променливо трифазно синусоидално напрежение за въртене на ротора.
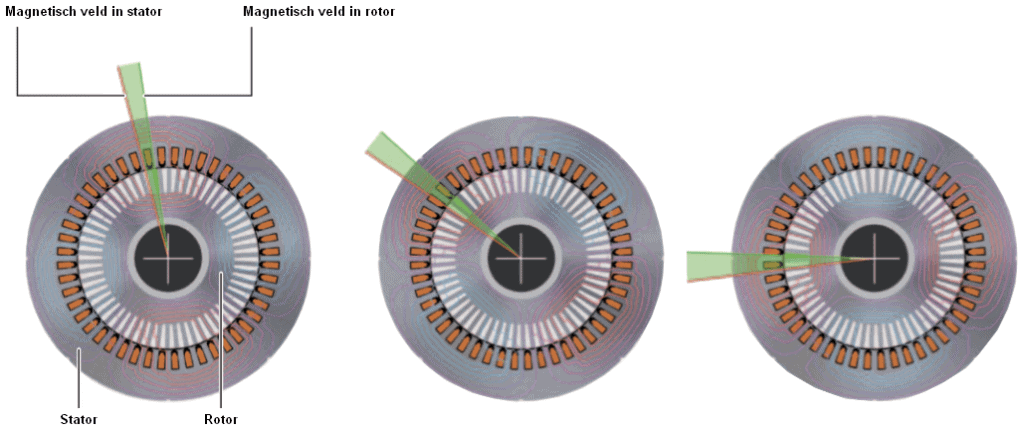
Изображението по-долу показва позицията на ротора с максимално възбудена U-намотка. В резултат на магнитното поле, северните полюси са се позиционирали точно срещу заредените U-намотки. Курсорът в графиката до електрическия мотор показва управлението на бобините в този момент.
За ваша информация: роторът в обяснението се върти, когато управлява намотките на статора по часовниковата стрелка.
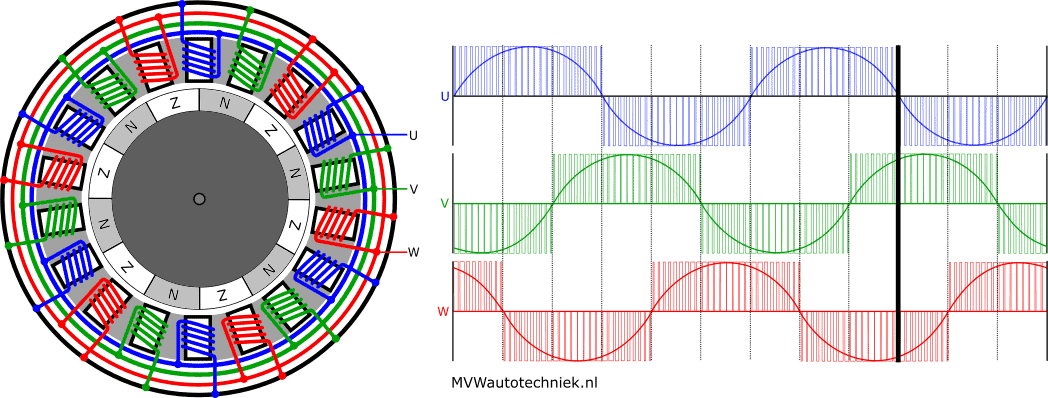
На следното изображение синусоидата, т.е. променливият ток през U-намотката, е максимално отрицателна. По време на това управление южните полюси на ротора са точно срещу захранените (U) намотки на статора.
Всъщност има малка въздушна междина между северния и южния полюс на ротора. По време на промяната от южния към северния полюс посоката на тока в U-намотката се променя. Освен това:
- Токът през V-намотката (зелено) е почти максимално положителен; северният полюс също е почти срещу намотката.
- Токът през W намотката е максимално отрицателен и нараства. Южният полюс се е завъртял покрай намотката.
За да създадете представа как протича токът, анимацията по-долу показва въртенето на ротора поради променливия ток.
Електрически двигател с променлив ток (асинхронен двигател с катерица):
Електрическият двигател с катерица или котва с късо съединение е асинхронен двигател. Разликата между синхронния двигател с постоянни магнити и асинхронния двигател е в ротора: това е барабан от меко желязо с проводници в надлъжна посока. Роторът работи асинхронно със статора, което означава, че има разлика в скоростта между ротора и магнитната скорост на статора. Статорът е абсолютно същият.
Роторът на асинхронния електродвигател се състои от късо свързани намотки; намотките U, V и W са свързани една с друга от едната страна. Когато роторът е във въртящото се поле на статора, в бобините на ротора се създава индукционно напрежение. Тъй като намотките на ротора са свързани накъсо една с друга, през тях протича ток. Този ток кара ротора да генерира магнитно поле, създавайки въртящ момент. Тъй като работата на асинхронния електродвигател се основава на закона за индукцията, ние го наричаме още асинхронен двигател.
Доставеният въртящ момент влияе на приплъзването между въртящото се магнитно поле в статора и скоростта на ротора.
Асинхронният двигател има редица предимства и недостатъци в сравнение със синхронния двигател.
Предимства:
- сравнително прост, здрав и евтин ротор;
- висок въртящ момент при ниска скорост.
минуси:
- по-ниска плътност на мощността (на маса) и ефективност (КПД). Токовете в късо съединените намотки на ротора водят до допълнителни загуби на ротора;
- скоростта не може да се контролира точно, защото зависи от натоварването. Само по себе си това не трябва да е недостатък: с добра система за управление скоростта на асинхронния двигател също може да се регулира;
- висок стартов ток.
Положението на ротора и скоростта на асинхронния двигател се измерват чрез a сензор за положение на ротора. Сензорите на Хол често осигуряват поне четири импулса на оборот на ротора, за да предадат позицията и скоростта на ротора. Ние не наричаме този тип датчик за положение на ротора резолвер, какъвто е случаят със синхронния двигател.
За разлика от синхронния двигател, сензорът за положение на ротора не е необходим, за да знае позицията на ротора в покой. Позицията на ротора е важна по време на въртене: трябва да се внимава приплъзването между магнитното въртящо се поле и ротора да не стане твърде голямо. Когато въртящото се поле се движи твърде бързо, може да възникне ситуация, при която роторът внезапно иска да се завърти в другата посока. Силите, които възникват, могат да бъдат пагубни за механичните и електрическите компоненти.
Някои производители също избират да използват асинхронен двигател резолвера прилагане. Причината не ми е известна. Във всеки случай, резолверът е изключително точен както когато стои неподвижно, така и докато бяга, което може да е от полза за прецизния контрол.
Карта на ефективността на синхронния и асинхронния електродвигател:
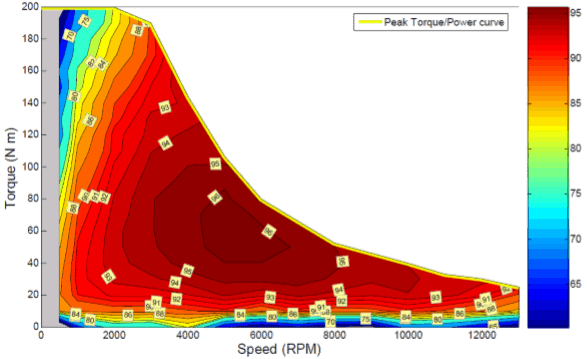
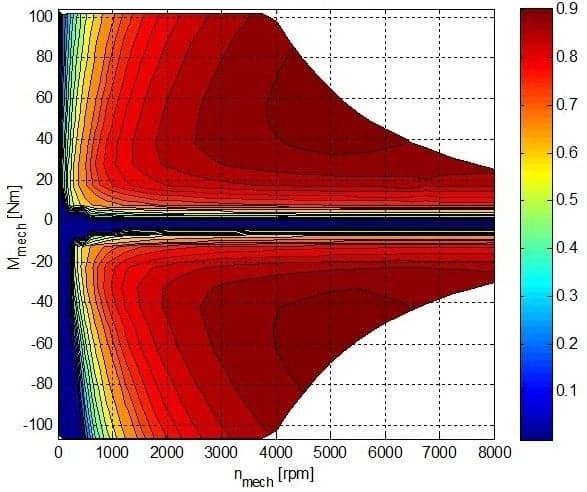
Изображенията по-долу показват ефективността на синхронния електродвигател (вляво) и асинхронния електродвигател (вдясно).
- Синхронният електродвигател е много ефективен. Ефективността е над 90% в голяма площ, с пикови стойности до 96%. От 2000 rpm настъпва отслабване на полето, което води до намаляване на максималния въртящ момент.
- Асинхронният двигател има значително по-ниска ефективност от синхронния двигател при по-ниски скорости.
Свързани страници: