Introduction:
A fault in CAN bus communication can cause multiple vehicle functions to fail, or entire control units to shut down. If a fault in the CAN bus is suspected, a diagnosis can be made by, among other things, measuring the voltage levels on the wires.
The content of the CAN bus message is not initially important. We can conduct measurements on the CAN bus wires with both the multimeter and the oscilloscope. However, measurements with the multimeter have limitations; when measuring the voltages, only an average value is indicated. The multimeter is limited for detecting interruptions or short circuits. An oscilloscope is needed for measuring voltage levels and assessing if the signal is pure.
How a CAN bus system works and how the messages are structured is explained on the page CAN-bus. This page focuses on measuring the CAN bus with the oscilloscope and the multimeter and describes possible faults and their causes.
Diagnosing CAN Bus Signals Low/Medium Speed:
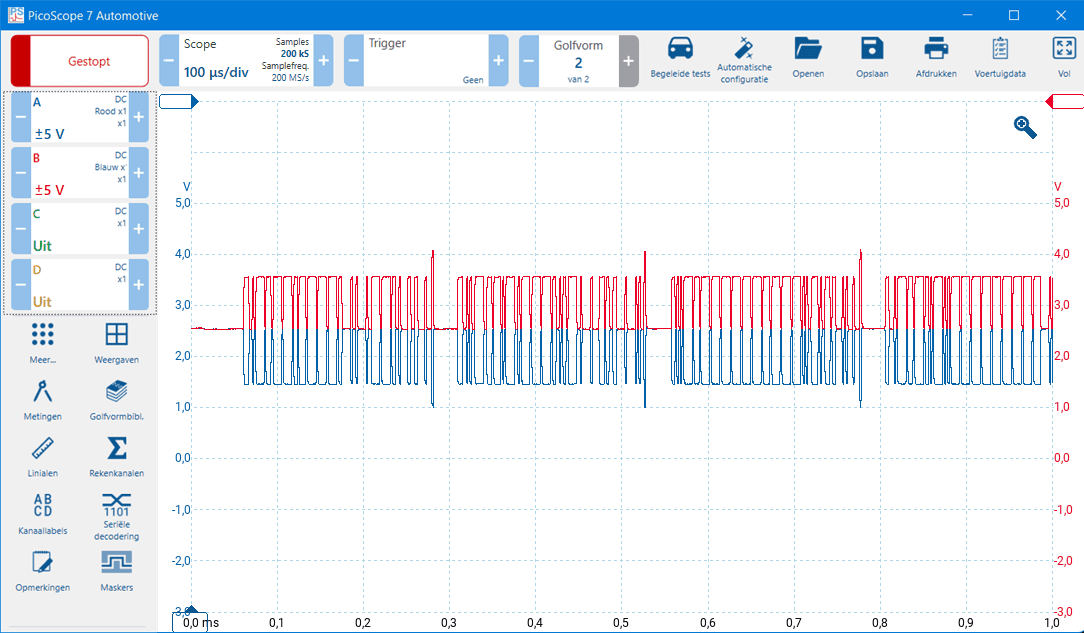
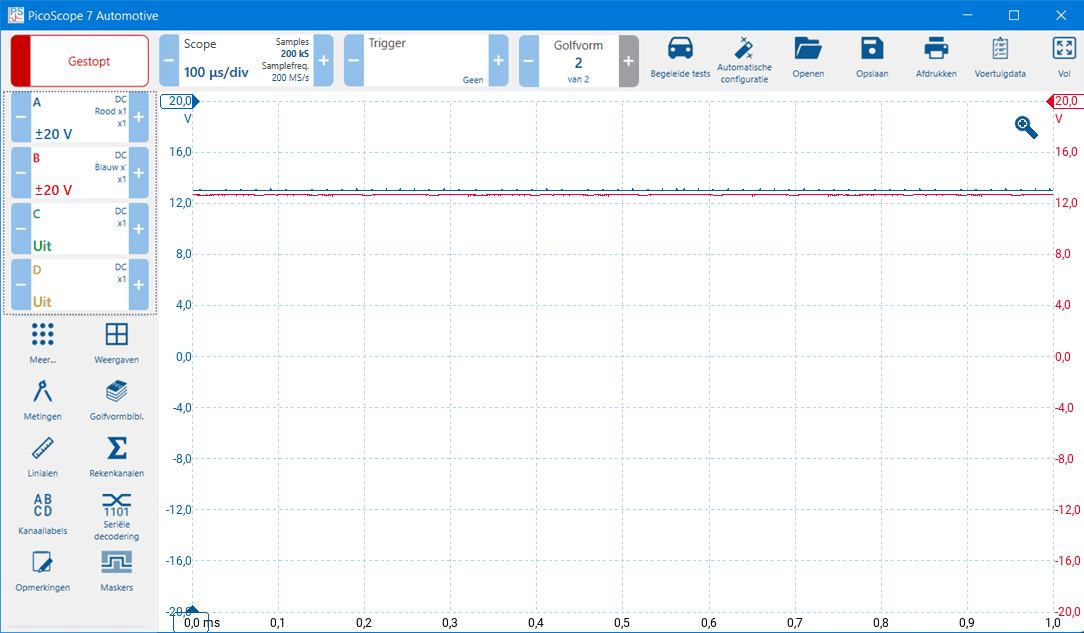
With a two-channel oscilloscope, CAN-high and CAN-low can be measured simultaneously relative to ground. The two scope images below show the CAN bus signal of the comfort bus, also known as “low speed” or “medium speed.” This network is often found in comfort electronics, such as door electronics, BCM, climate control unit, and the instrument panel. The voltages are as follows:
- CAN-low: at rest 5 volts, active 1 volt;
- CAN-high: at rest 0 volts, active 4 volts.
Once we set the baselines of both measurement channels at the same Y-axis height, the signals overlap. Therefore, for readability, it is advisable to move the Y-axis of CAN-low upwards. In the second image below, the baselines are altered so that the voltage changes of CAN-high and CAN-low can be well compared.
Note: Low and medium speed CAN networks typically do not have termination resistors, unlike the high speed CAN network. Measurements performed on a fault for this reason are also different. This section shows possible faults of the low and medium speed network, and the next section covers those of the high speed network.


CAN-high Shorted to Ground:
There is a ground short circuit in the CAN-high. When insulation is damaged, the wiring can make contact with the chassis, or a short circuit to ground occurs within a ECU.
In the measurement below, we see a constant 0-volt line on channel B.
CAN-low Shorted to Ground:
There is a ground short circuit in the CAN-low. When insulation is damaged, the wiring can make contact with the chassis, or a short circuit to ground occurs within a ECU.
In the measurement below, we see a constant 0-volt line on channel A.
CAN-high Shorted to Positive:
There is a positive short circuit in the CAN-high. If the insulation of several wires in a harness is damaged, the wiring can make contact, or a short circuit to positive occurs within a ECU.
In the two measurements below, we see:
- Channel overrange: the voltage range of channel B (red) must be increased;
- On channel B (in 20 V range), a constant voltage line equivalent to the battery voltage is visible.


CAN-low Shorted to Positive:
There is a positive short circuit in the CAN-low. If the insulation of several wires in a harness is damaged, the wiring can make contact, or a short circuit to positive occurs within a ECU.
In the two measurements below, we see:
- Channel overrange: the voltage range of channel A (blue) must be increased;
- On channel A (in 20 V range), a constant voltage line equivalent to the battery voltage is visible.


CAN-high Shorted with CAN-low:
CAN-low shifts to follow the voltage level of CAN-high when they connect. Short circuits between CAN-high and CAN-low can happen within the wiring where the insulation of both CAN bus wires is worn through, or due to a defect in a ECU circuit board.
In the image below, we see a two-channel measurement where CAN-high and CAN-low are shorted.
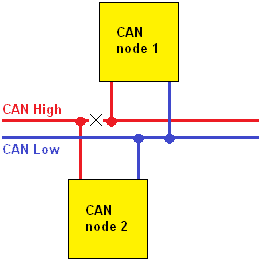
Intermittent Communication Loss on CAN-high:
Communication with one control unit in CAN-high is disrupted. This control unit no longer sends or receives data via CAN-high, while CAN-low remains operational. As a result, communication and reading remain possible.
When the connector of the relevant control unit is unplugged, CAN-low data also disappears and there is no more visible difference between CAN-high and CAN-low.
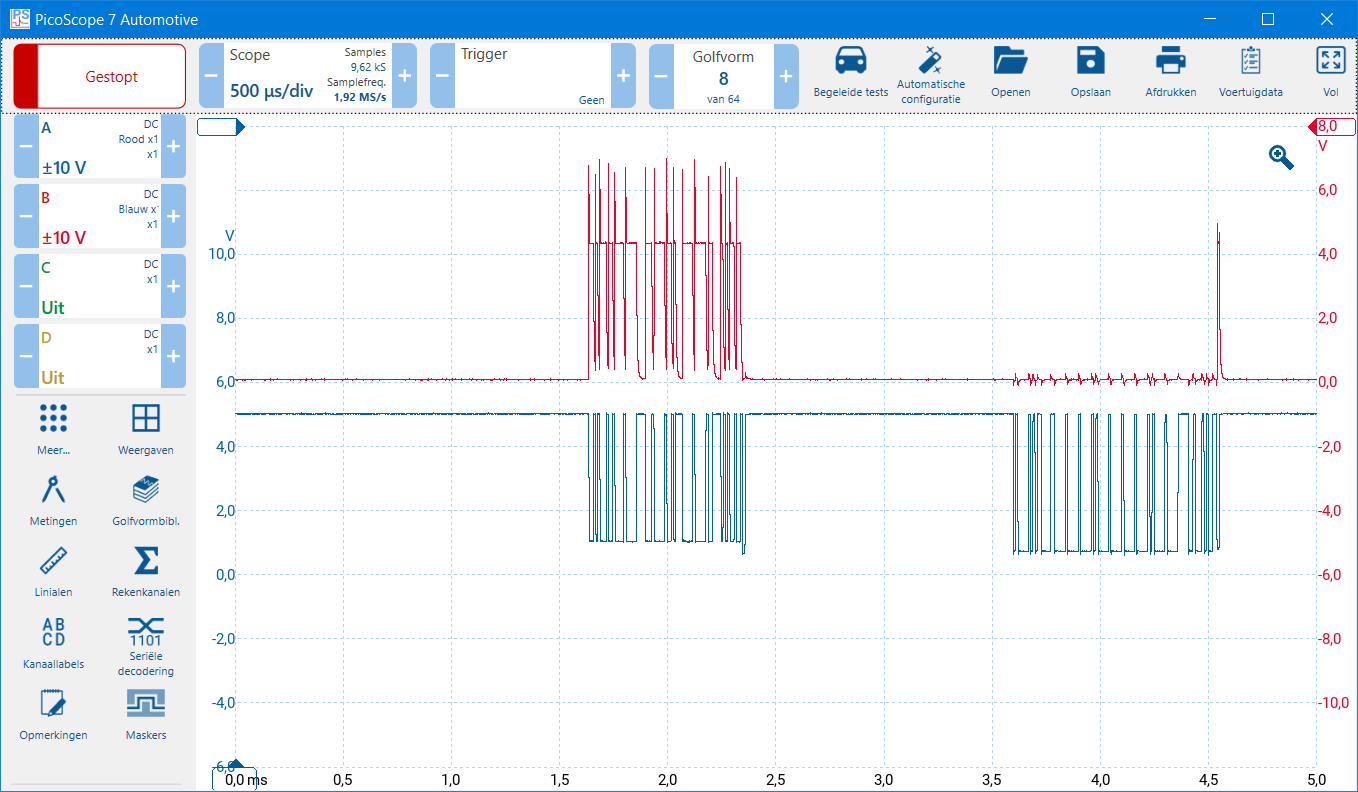
In the image below, we see CAN-high remaining passive at one point, while data is being sent on CAN-low.
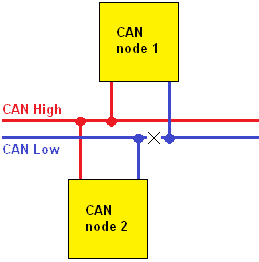
Intermittent Communication Loss on CAN-low:
Communication with one control unit in CAN-low is disrupted. This control unit no longer sends or receives data via CAN-low, while CAN-high remains operational. As a result, communication and reading remain possible.
When the connector of the relevant control unit is unplugged, CAN-high data also disappears and there is no more visible difference between CAN-high and CAN-low.
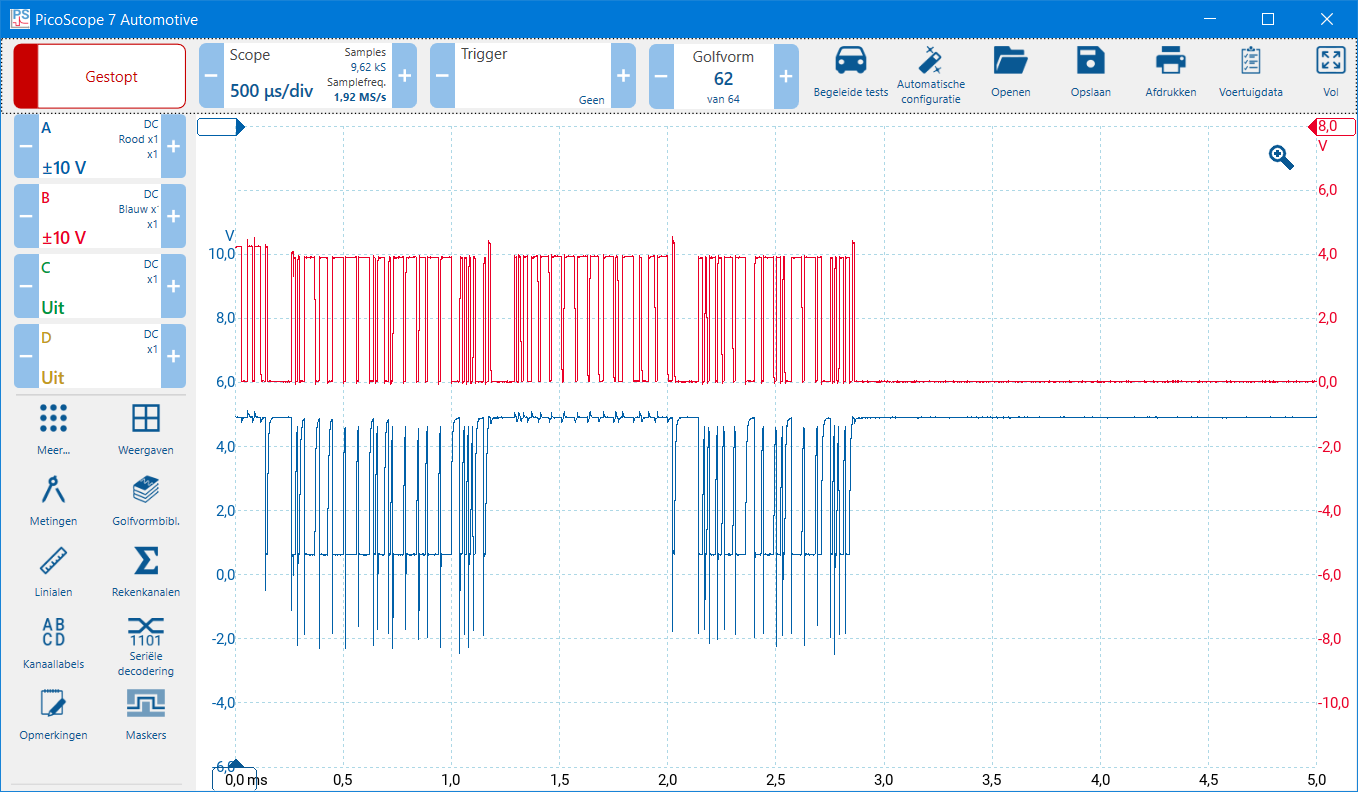
In the image below, we see CAN-low remaining passive at one point, while data is being sent on CAN-high.
Diagnosing CAN Bus Signals High Speed:
The ECUs where high communication speed is crucial are equipped with a high-speed CAN network. Examples include the internal combustion engine ECU, automatic transmission, ABS/ESP/EBS, and the airbags. A high speed network always includes termination resistors. Faults in the wiring and ECUs also result in different voltage patterns, which can sometimes make diagnosis harder than in a comfort network. As always, a fault-free situation is depicted first before proceeding to faults.
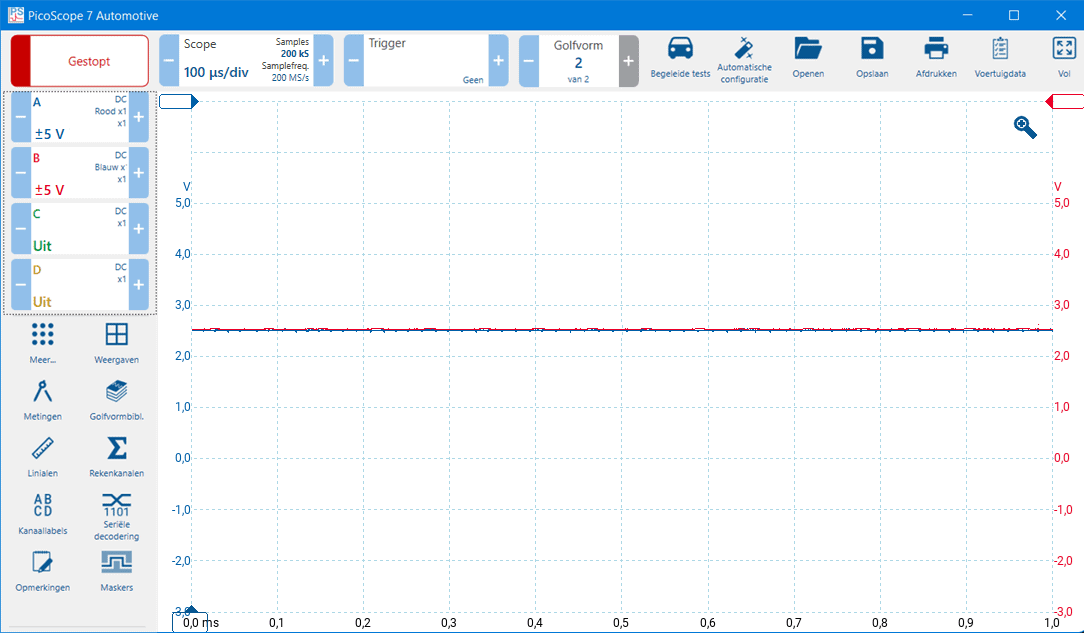
The voltages of a high-speed network are as follows:
- CAN-high: at rest 2.5 volts, active 3.5 volts;
- CAN-low: at rest 2.5 volts, active 1.5 volts.
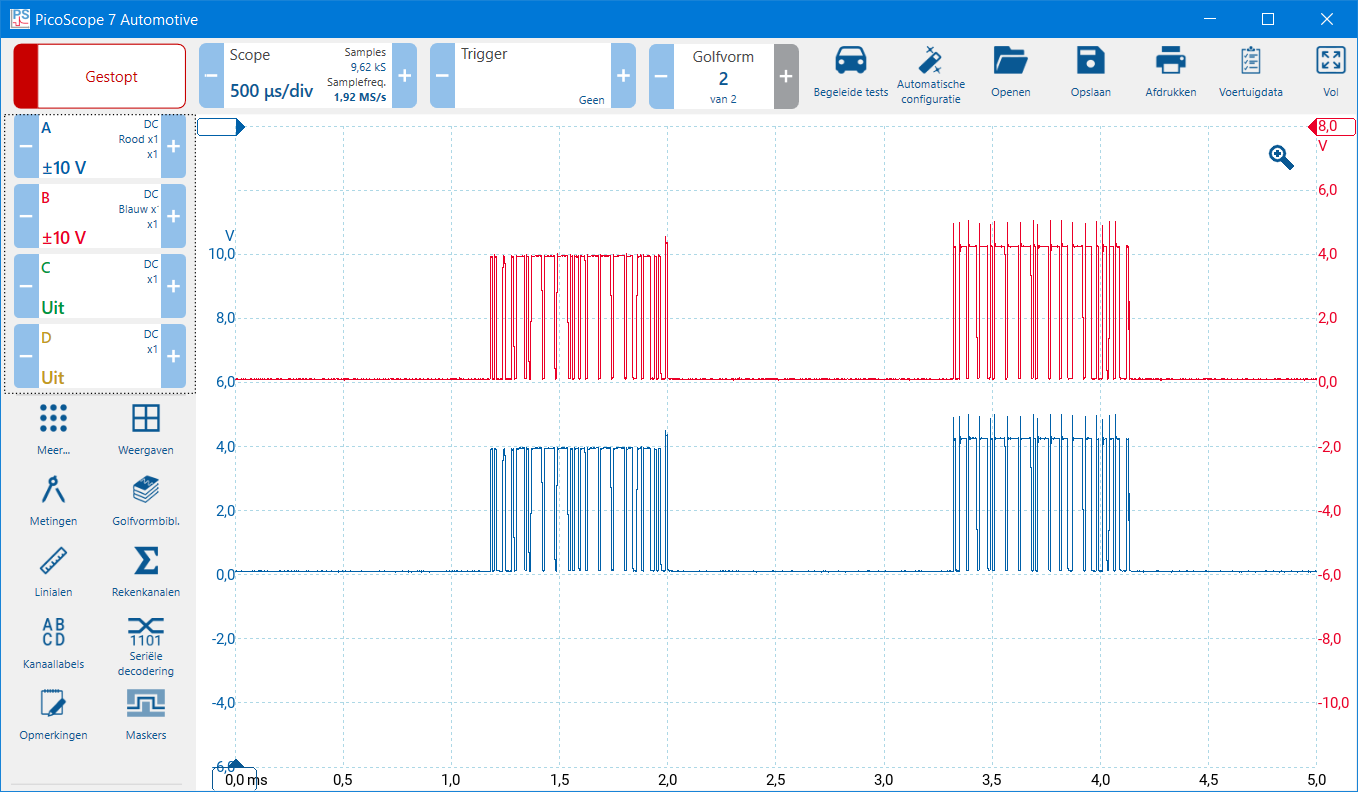
When CAN-high and CAN-low are both 2.5 volts, the bus is recessive (at rest). When CAN-high rises and CAN-low falls, the bus becomes dominant and a bit is formed. The image below shows a screenshot of a correct high-speed CAN bus signal.
If such a signal is measured and a lot of noise is visible, it is advisable to remove the vehicle battery charger, connect the oscilloscope to the vehicle ground (automotive scopes have a “ground” connection on the back for this purpose), and the signal can be made cleaner with the sample frequency. Sampling smooths the signal, so if it deviates far from the standard value, the CAN signal may become too distorted.
For clarity: in the image below, CAN-high is red, and CAN-low is blue.
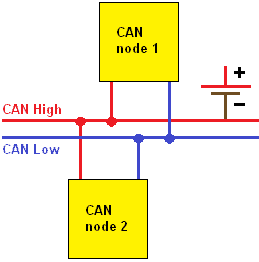
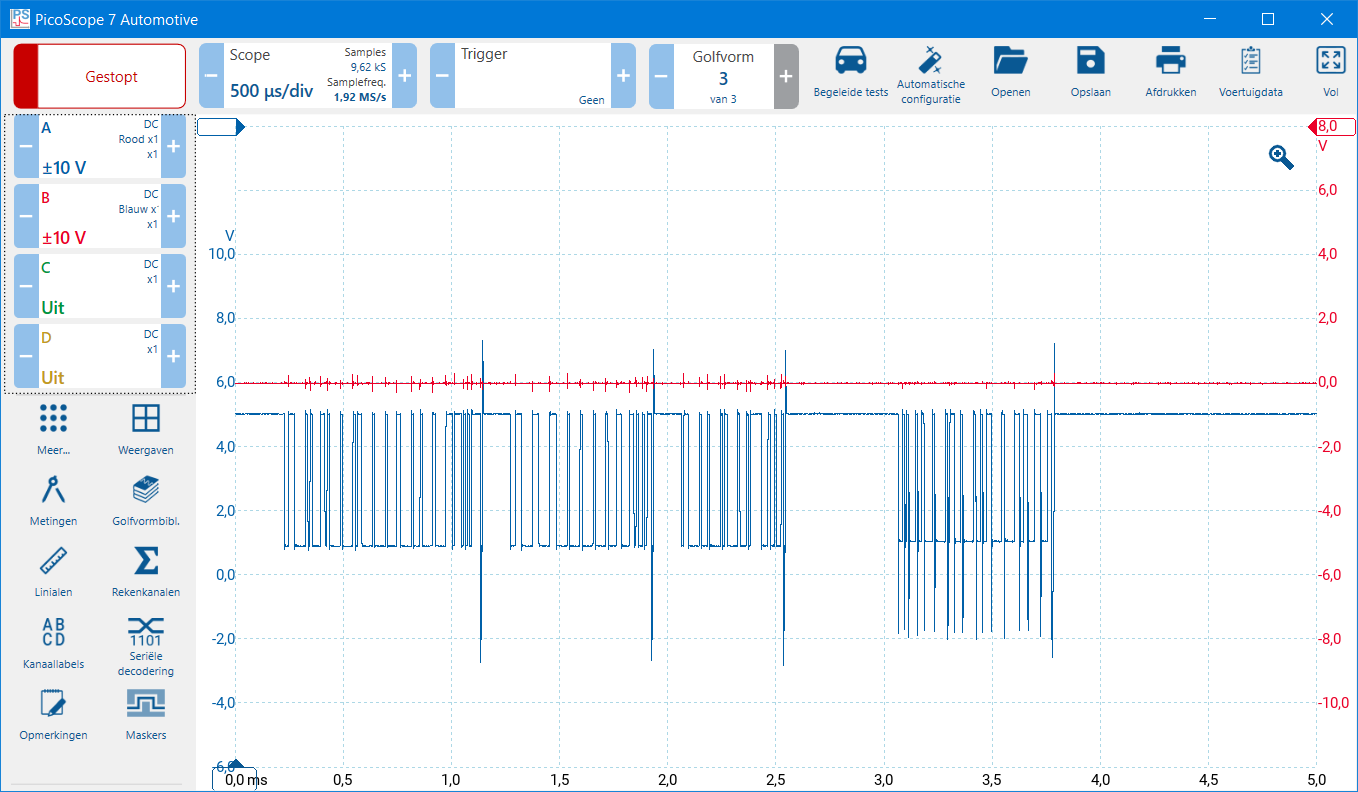
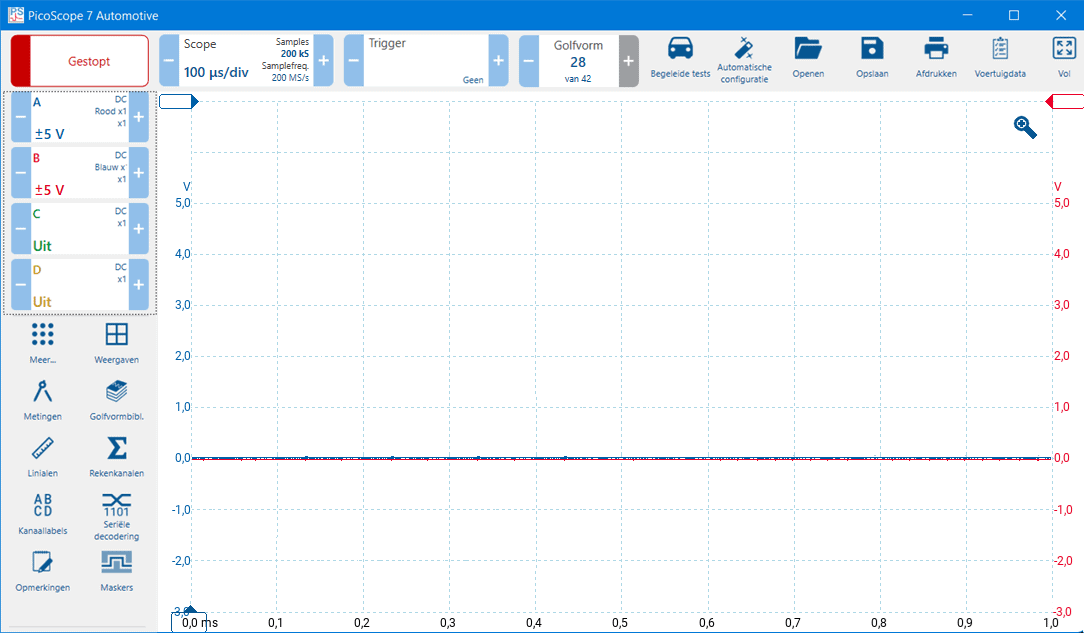
CAN-high Shorted to Ground:
There is a ground short circuit in the CAN-high. When insulation is damaged, the wiring can make contact with the chassis, or a short circuit to ground occurs within a ECU.
In the measurement below, we see that CAN-high (red) is exactly 0 volts because it is shorted to ground. CAN-low (blue) is slightly above the baseline. Zooming into this signal would make it clearer. Since CAN-high is precisely 0 volts and CAN-low is a few tenths of a volt higher, we can conclude that CAN-high is short-circuited to ground.
CAN-low Shorted to Ground:
There is a ground short circuit in the CAN-low. When insulation is damaged, the wiring can make contact with the chassis, or a short circuit to ground occurs within a ECU.
In the measurement below, we see that CAN-low is 0 volts. There is some noise visible, but it can be disregarded. CAN-low is shorted to ground. The voltage line of CAN-high is seen to rise but not enough to initiate communication. The scope image also shows that CAN-low is always lower in voltage than CAN-high (red is always higher than blue), so we can assume CAN-low is shorted to ground.
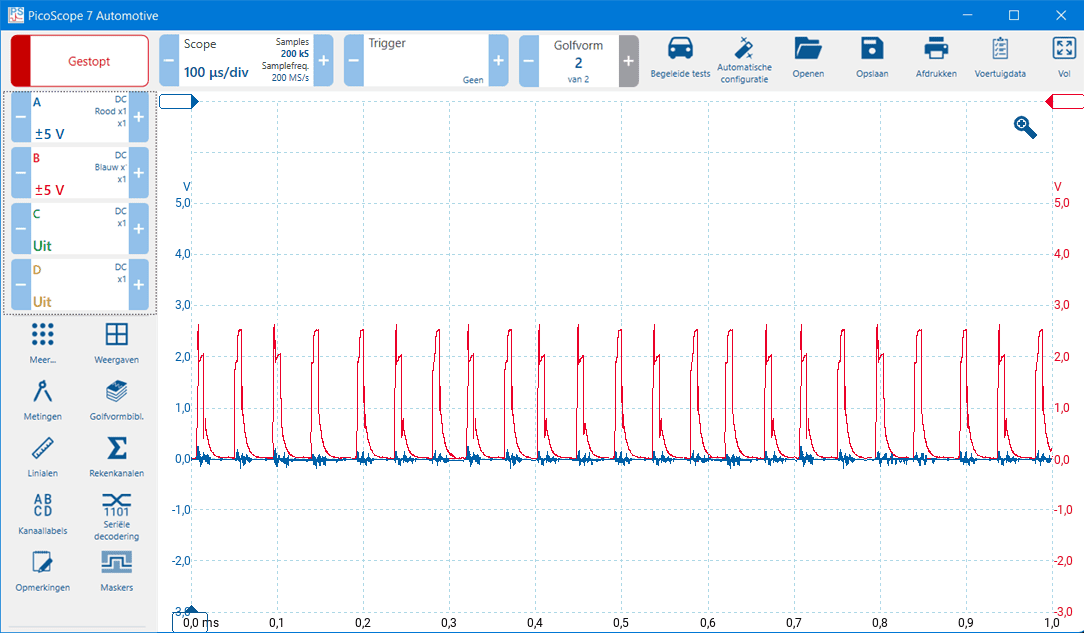
CAN-high Shorted to Positive:
There is a positive short circuit in the CAN-high. If the insulation of several wires in a harness is damaged, the wiring can make contact, or a short circuit to positive occurs within a ECU.
In the image below, we see a phenomenon resembling the situation where CAN-low was shorted to ground. CAN-high (red) has risen to the board voltage around 12 volts. CAN-low (blue) has also increased in voltage and tries to communicate by lowering the signal. Since communication does not start, negative voltage spikes continue to repeat.
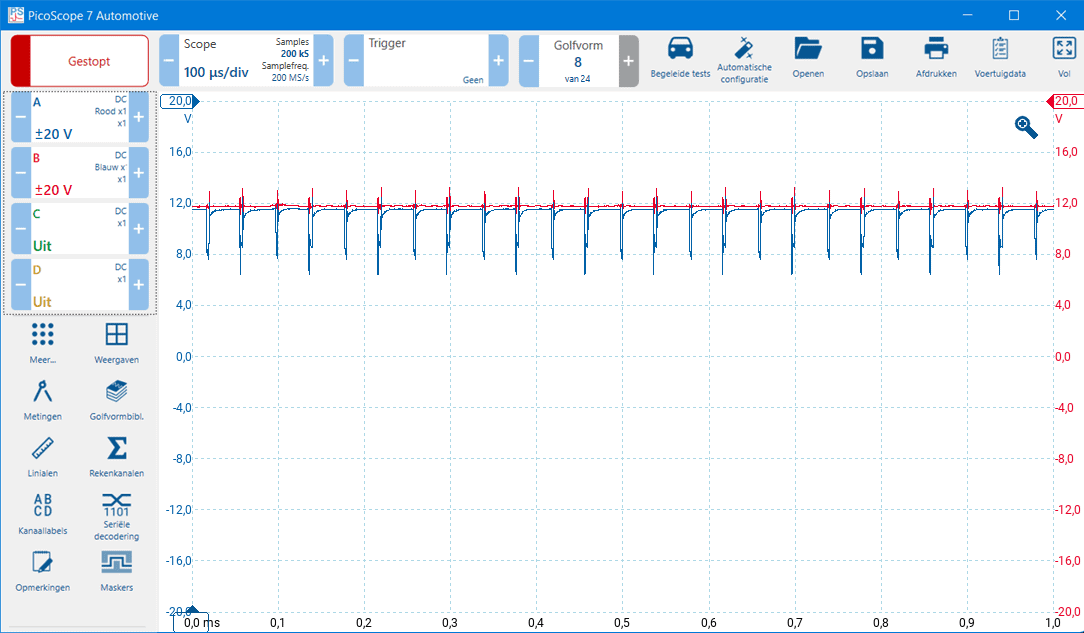
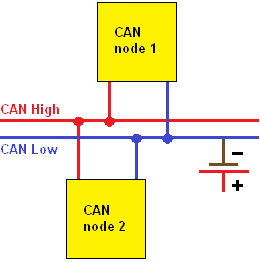
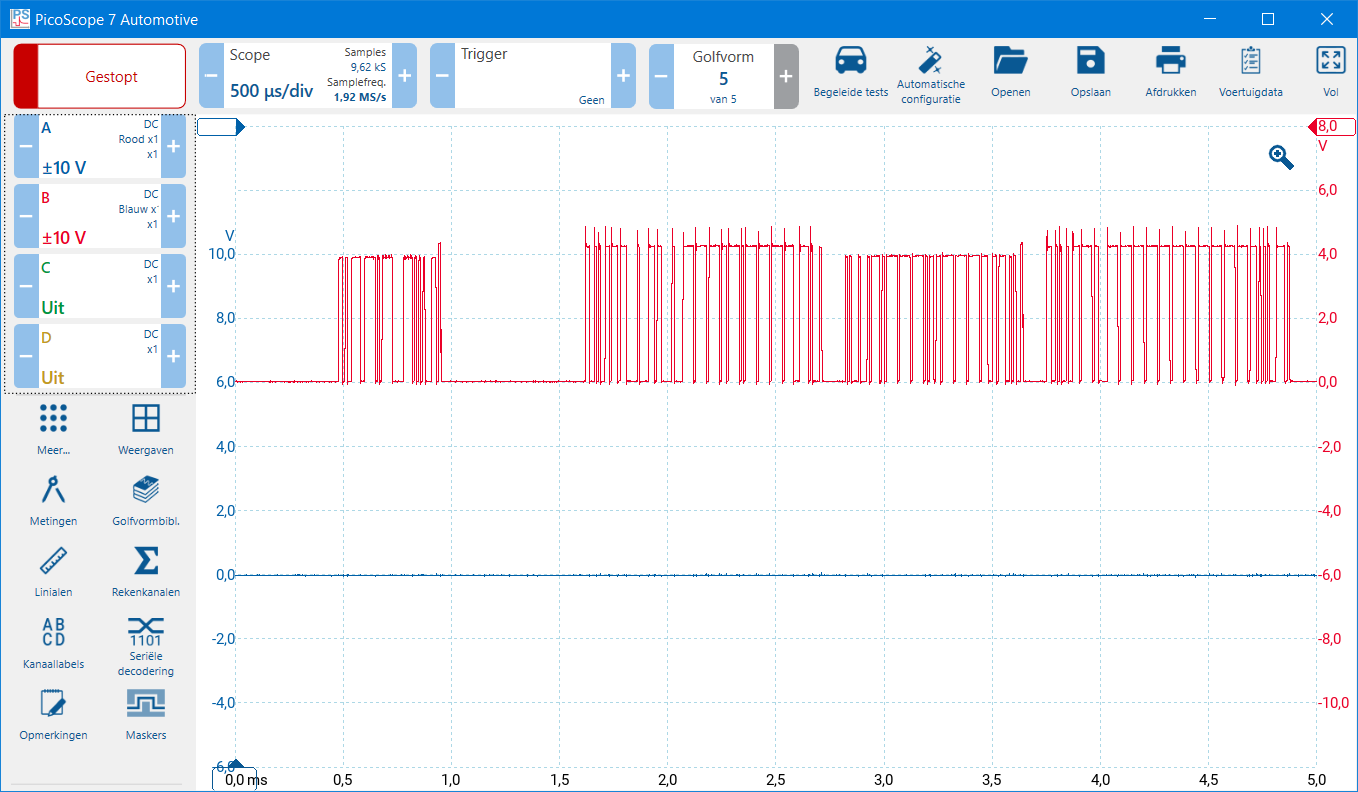
CAN-low Shorted to Positive:
There is a positive short circuit in the CAN-low. If the insulation of several wires in a harness is damaged, the wiring can make contact, or a short circuit to positive occurs within a ECU.
In the measurement below, we see that CAN-high and CAN-low are around 12 volts. However, the voltage of CAN-low is about 200 mV higher than CAN-high. CAN-low has lifted CAN-high upwards. This indicates that CAN-low is shorted to positive.
CAN-high Shorted with CAN-low:
CAN-low shifts to follow the voltage level of CAN-high when they connect. Short circuits between CAN-high and CAN-low can happen within the wiring where the insulation of both CAN bus wires is worn through, or due to a defect in a ECU circuit board.
In the image below, we see a two-channel measurement where CAN-high and CAN-low are shorted. The voltage on both channels is 2.5 volts.
Diagnosing with the Multimeter:
Measuring the voltage levels of the CAN bus with a multimeter is unwise. The multimeter provides average values for fluctuating voltages, resulting in a poor diagnosis. The oscilloscope should be used for measuring voltages.
The multimeter can be utilized to measure the resistances of (only) a high-speed CAN network with termination resistors. The measurements below show the ohmic resistance in three different scenarios: with a functioning system, a broken wire, and a short circuit between CAN-high and CAN-low. Termination resistors are rarely present in low/medium (comfort) networks, hence these measurements are not possible.
Fault-Free:
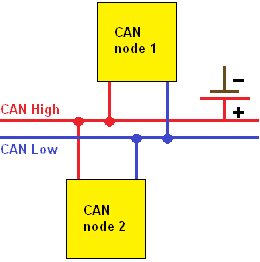
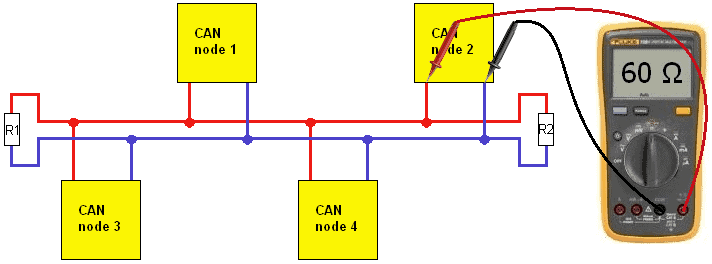
On the page CAN-bus it is outlined that two termination resistors are present in the network. Both termination resistors have a resistance of 120 ohms. In a fault-free system, a replacement resistance of 60 ohms will be measured between CAN-high and CAN-low.
Note: this can only be measured if the supply voltage of all control units is switched off!
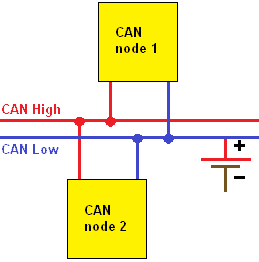
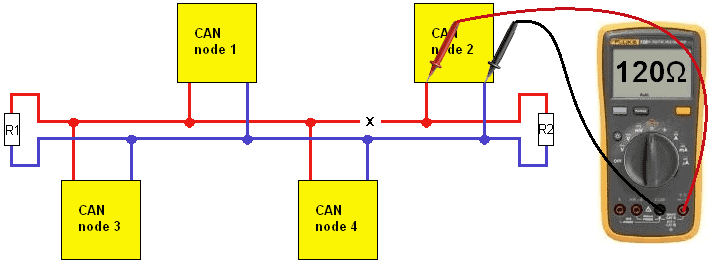
Interruption:
In the case of an interruption in a CAN-high or CAN-low wire, we no longer measure the replacement resistance of 60 ohms. In the image, we measure only the value of resistor R2 (120 ohms).
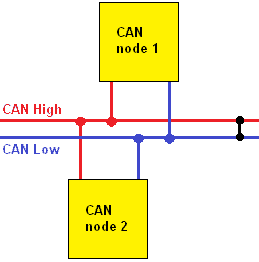
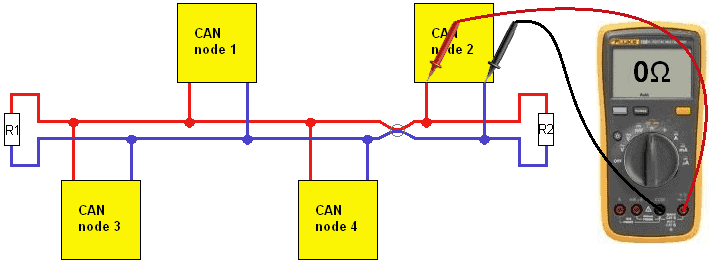
Short Circuit:
When the CAN bus wires make contact with each other (thus are shorted), we measure a resistance value of approximately 0 ohms.
In the following fault, both CAN wires are interrupted. A lot of interference (noise) will now occur on the bus. Nodes 1, 3, and 4 can communicate with each other unless the interference and reflection become too great, causing the messages to distort. Nodes 2 and 5 can also communicate with each other under the same conditions.
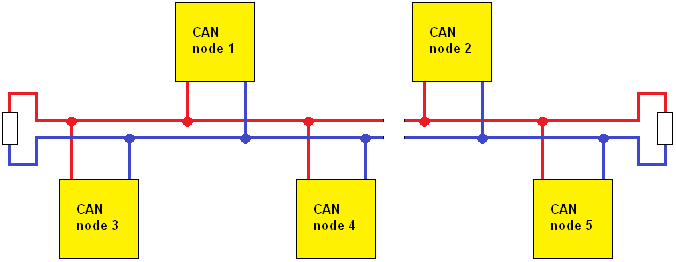
Some CAN networks also function when one wire is interrupted. Although fault codes will be stored, and the driver will be notified by warning lights from various systems, these are networks equipped with a Fault Tolerant CAN transceiver. Depending on the transceiver used, different types of errors can occur without losing communication between the nodes. Even with the previously mentioned faults with shorts to positive and ground, these CAN transceivers can operate normally (though with various error messages).