Subject:
- Steering error
Steering error:
The Ackermann principle ensures that when turning, one wheel steers further than the other. For more information, see the page Ackermann principle en swerve in the bend.
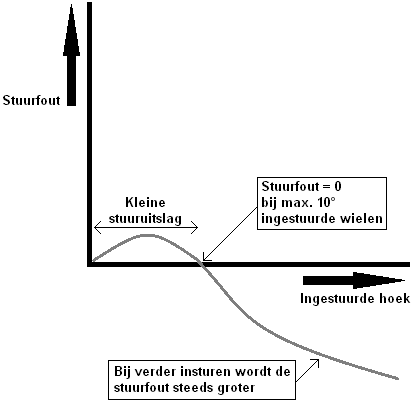
When reading the said pages it will be clear that the left front wheel and the right front wheel both have a different steering angle. A steering error almost always occurs. The steering error means that the two angles turned in are not equal to each other and therefore one wheel has more slip than the other. There is only one situation where no control error occurs. This is when turning at a small steering angle, up to approx. 10 degrees (see picture).
The X-axis in the figure shows the steered angle and the Y-axis shows the steering error. In the left corner (so at X = 0 ) you drive straight ahead. The line under “Small steering angle” runs positively along the X-axis. This line indicates that the steering error at max. 10 degrees of turn-in is 0. So there is no steering error at max. 10 degrees. There is then no slip in the front wheels. This is deliberately constructed this way, because when driving at high speeds (eg on the highway) often around 10 degrees is steered in. At high speed, the front wheels have no slip at max. 10 degrees of steering, so the maximum grip. The steering error becomes a lot bigger when you send in further. That is not a problem in principle, because this is usually in the city, at lower speeds. At lower speeds, the steering error has less influence than at higher speeds.