Subjects:
- Parking assistance general
- Parking distance control
- Reversing camera
- side view
- surround view
- Parking assistance
Parking assistance general:
Parking assistance includes systems that assist a driver in entering and exiting a parking space. The most well-known parking aid system is the “park distance control”, abbreviated as PDC. This system informs the driver of the vehicle about the distance to the car behind, or in the case of extensive systems also to the front of the vehicle. This page describes the modern technologies that are either an extension of the park distance control or a completely self-contained assistance system.
Park distance control:
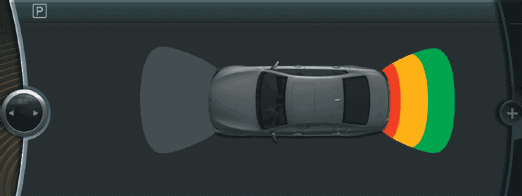
Park Distance Control (PDC) is a distance warning system that measures signals when parking and parking and informs you about the distance to the obstacle. Ultrasonic sensors are located in the rear bumper and often also in the front bumper (see image). These emit very high frequency sound waves that are imperceptible to the human ear. These ultrasonic frequencies bounce off nearby objects and are received by the sensor again. The sensor measures the time between sending and receiving these signals. The closer the object is, the faster the signal bounces back. The sensor catches it and passes it on to the PDC control unit (computer).
This computer can transmit it to the driver in audio signals and with both visual and audio signals. A beeping sound is then heard, which beeps faster and faster as the object comes closer. At a distance of about 30 cm, it gives a constant beep, so that you as a driver know that you have to stop.

Modern on-board computers are often equipped with an option whereby the distance to the object is shown on a screen. The PDC sensors are the same; the control unit calculates the data from the sensors and processes it into information that the screen can display.
The figure below shows the PDC Control Unit (ECU). In this gray square are the microcontroller, amplifier and an AND gate. The microcontroller transmits a square-wave voltage at a frequency of approximately 40 kHz (black). A square voltage with a low frequency is also periodically output (red / blue). The AND gate receives the two square voltages. The moment both voltages are high, the output voltage (to the right of the AND gate) is high. When one of the two voltages is low, the output also goes low. The output voltage is sent back to the microcontroller and to the transmitter in the PDC sensor. The transmitter transmits the ultrasonic signal at a speed of approximately 300 m/s. When an object is nearby, the ultrasound reflects and is registered by the receiver. We call this the “triangle measurement”. The receiver sends the shaped block signal to the ECU. Using an amplifier, the block signal is amplified and then processed by the microcontroller.
The time between receiving the output signal from the AND gate and the amplifier is a measure of the distance to the object. The shorter the distance between the PDC sensor and the object, the shorter the time. The microcontroller controls the buzzer or communicates with other control units via the CAN bus.
The current flow diagram (VAG) below shows the communication between the control units, inputs of switches and outputs to the buzzer, among other things.
The PDC control unit (J446) receives the vehicle speed and the reverse signal via the CAN bus. The PDC control unit sends a modulated square-wave voltage via the T12/11 connection to the cable splice (X86 in the rear bumper), which is connected to all PDC sensors (G203, G334, G335 and G206). Each PDC sensor has its own signal wire (via pin 2) to the ECU. Furthermore, the ground of each sensor is connected to a ground weld (352).
The moment one or more sensors detect an object, the control unit activates the buzzer (H15). Depending on the distance to the object, the buzzer gives a faster or less interrupted sound signal.

Communication with the diagnostic interface (J533) makes it possible to perform the following diagnostic functions:
- query fault memory
- adjust control unit codes (e.g. after expanding the system with PDC sensors on the front or after installing a tow bar)
- adjust buzzer volume
- Query measured value blocks of, among other things, the distance of all sensors to the object, the calculated distance and the stabilization time of the transmitter and receiver.
Reversing camera:
In addition to the park distance control, the parking aid can also be equipped with a reversing camera. The moment the driver puts the vehicle into reverse gear or presses a button in the passenger compartment, the camera at the rear of the vehicle is activated. Usually the screen of the radio or the on-board computer shows the image.
The image below shows a screen of a BMW with the image at the rear of the vehicle. To the right of the camera image is a vehicle with a three-part grid on the front and rear; displays the distance to an object that the PDC sensors record.
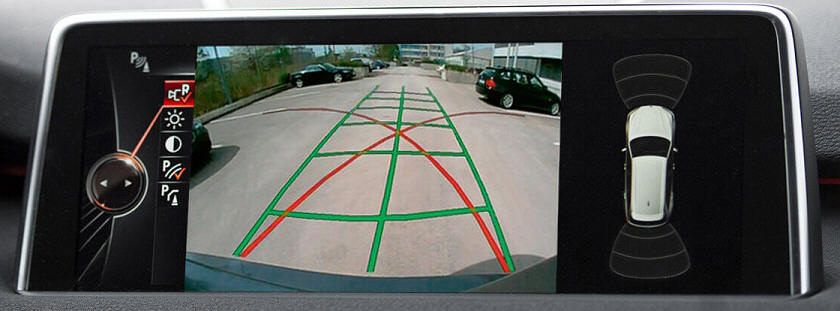
The image of the rear view camera shows red and green lines. The red lines show the possible direction in which the vehicle can be steered; at maximum turn-in, the wheels in the outer corner will follow the red line. The green grid follows the direction the steering wheel is turned; at this point the front wheels are straight ahead. When the driver turns the steering wheel, the green lines indicate the actual driving lines. The steering angle sensor registers the position of the steering wheel.
The rear view camera is sometimes in plain sight and is often located near the license plate and/or the handle to open the tailgate. Sometimes manufacturers choose to mount the camera out of sight. The image below shows the rear view camera of a VW Golf, with an electric motor tilting the VW decal to move the camera out. The emblem automatically folds back when you drive forward again. Not only is the camera placed out of sight, the lens also gets dirty less quickly.

side view:
When you are parked backwards between two vehicles or large objects, you have to drive forward a bit to look left and right. With a side view camera (also called corner view) this is a lot easier; cameras on the left and right in the front bumper send the image to the screen in the dashboard. The picture shows the view from the corner cameras. Unfortunately, cameras cannot be mounted invisibly. Cars fitted with a side view camera have a (often) black lens in the bumper. The image below shows the front bumper of a BMW with the left camera.


surround view:
The "surround view", also known as top view, 3D or bird-view, is undoubtedly one of the most luxurious parking assistance systems. Each brand gives its own name and characteristic to the system. We now use the name surround view.
With surround view, the top of the car is shown on the screen. It seems as if there is a camera on the roof of the car and the area around it. The car is a simulation and the environment is recorded by several (usually four) cameras composed.
The three following images (from BMW) show the image that the driver sees. During parking, the separations of the parking space and the objects, such as posts, etc. are clearly visible. When driving backwards, you can zoom in on the back; here are mainly plants to see. The conventional PDC sensors record the distance to the plants. The computer marks this distance with a red color.

During forward parking, the system can also show the surroundings and the front. Even now, PDC sensors help to determine the distance to the fence.

Parking parallel to a curb can, if the driver is not careful, damage the tires and rims. Also now the surround view offers a solution; thanks to the good overview of the street scene, you can park straight and close to the curb. The latest developments from BMW make it possible to invert the image of the camera and simulate the vehicle.

The next three images show the places where the cameras are usually located.



Parking aid:
As an extension of the parking aid, the so-called “parking aid” can assist the driver when backing out of a parking space with limited visibility. This can be in situations where the vehicle is parked next to a wall or between vehicles.
The sensors at the rear of the vehicle detect traffic passing behind the vehicle and may pose a risk of a collision. This includes all moving objects that approach the vehicle at a certain speed. When the parking assist system detects an approaching vehicle, a message appears on the infotainment system's display. Usually an acoustic signal is added to this. If the driver ignores these signals and still drives backwards, the system intervenes physically by applying the brakes and causing the vehicle to slow down.
