Subjects:
- ESP general
- Other names for ESP
- understeer
- upset
- Steering angle sensor
- Lateral acceleration sensor (G-sensor)
- Yaw moment sensor (Yaw sensor)
- Brake pressure sensor
ESP general:
ESP is an abbreviation of Electronic Stability Program and works in combination with ABS and ASR. If the vehicle is equipped with ABS (Anti Blocking System) and ASR/ASC (Anti Slip Regulation / Control), the ESP system can be added with the help of a number of additional sensors and a software adjustment. The components such as the wheel speed sensors and the ABS pump / control unit are also used for the ESP system. The ESP system also regulates that the engine power decreases; by closing the throttle more, or by leaving the ignition.
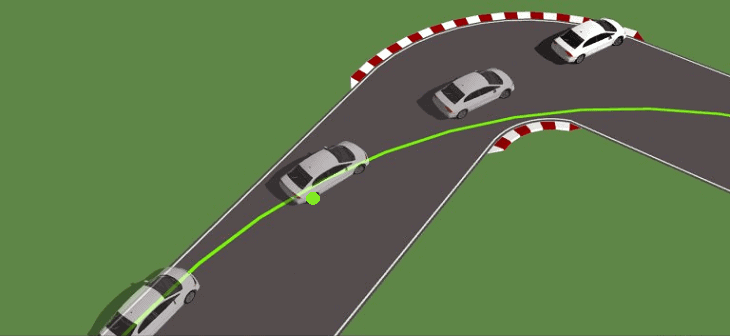
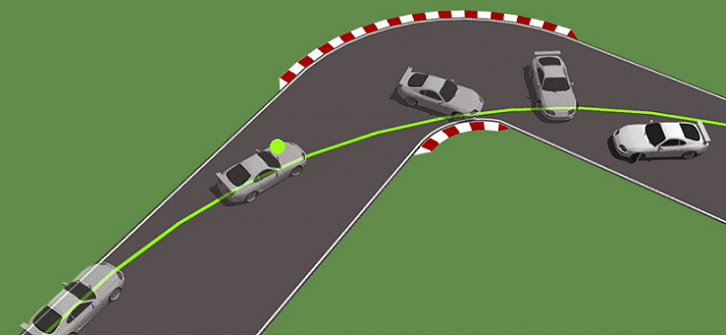
The purpose of the ESP system is to improve cornering behavior (understeer and oversteer). This applies, for example, to situations where a brake intervention is taken in a bend, or when an evasive maneuver takes place. The ESP system brakes a wheel of the vehicle, so that a normal steering character is obtained again. Below are the 2 situations where the green indicated wheel is braked. Braking will cause the vehicle to follow the green line, instead of becoming uncontrollable. Various required ESP components are described at the bottom of this page.
Other names for ESP:
Car manufacturers often use their own names for ESP for their models, even if the function is the same. These other names are given to make the system appear more "luxurious" than the standard ESP. Examples of this are:
- ASC + T: Automatic Stability & Traction Control (old generation BMW from before 1996)
- DSC: Dynamic Stability Program: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: Dynamic Stability and Traction Control (Volvo)
- ESP: Electronic Stability Program (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagen
- PSM: Porsche Stability Management (Porsche)
- VDC: Vehicle Dynamic Control (Alfa Romeo)
- VDCS: Vehicle Dynamic Control System (Subaru)
- VSC: Vehicle Stability Control (Lexus, Toyota)
- USA: Vehicle Stability Assist (Honda)
Understeer:
Understeer occurs when the front tires have insufficient grip on the road surface. The car will make a shallower turn than intended, so will have more of a tendency to go straight. The front wheels will therefore slide to the outside of the bend. Understeer can be lifted to ensure that the front wheels have sufficient grip on the road surface again. For this, less gas can be given or less steering can be done. More steering doesn't help understeer, it can even make it worse because the wheels only get less grip. Most car manufacturers adjust the suspension so that the car tends to understeer rather than oversteer. The reason is that the average driver immediately releases the gas in such a situation (which can be the solution so that the car has grip again).
upset:
Oversteer occurs when the rear tires lose traction on the road surface. The rear tires of the car will slide towards the outside of the curve. The rear then wants to overtake the front, which will allow the vehicle to turn on its axis. Oversteer can be corrected by countersteering and slowing down on rear-wheel drive cars (eg BMW) and slightly accelerating on front-wheel drive cars (eg Volkswagen). Often, especially in motorsport, oversteer is deliberately used to make it easier and faster to drive through a combination of bends. In an extreme case, this form of upset is called “driving”. Oversteer is generally more dangerous than understeer because most drivers are less likely to correct it. Therefore, when designing the car, the chassis is adjusted more to 'understeer' because that is easier to correct.
Steering angle sensor:
The steering angle sensor is mounted on the steering column. This can be at the steering box, but also in the interior between the turn signal / windshield wiper levers, as shown in the picture on the right. These are the steering column switches from a BMW.
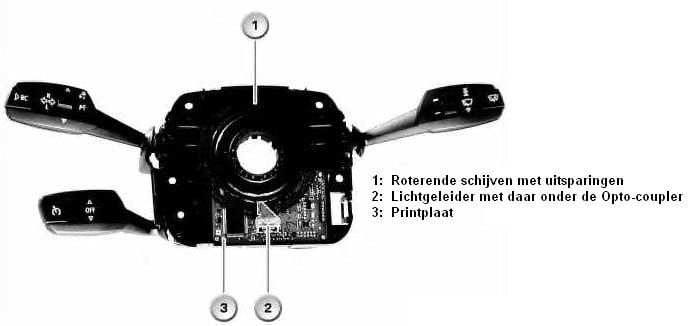
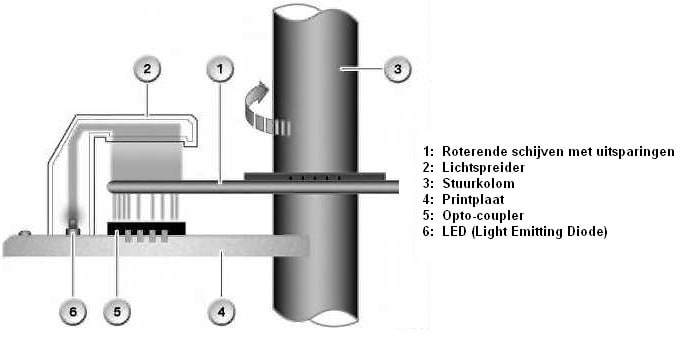
The steering angle sensor's job is to measure the angle of rotation of the steering wheel. This sensor uses one or more opto-couplers that measure the light transmission of the rotating discs. The light slits are different at each location of a rotating disc, so that the exact position of the steering wheel can be recognized. All recesses in the discs create an asymmetrical block signal. The opto-coupler can convert a light signal into a voltage that is then passed on to the control unit.
Lateral Acceleration Sensor (G-sensor):
The lateral acceleration sensor (also called the G-sensor of the G-forces) is positioned as close to the center of the car as possible. When cornering, the movable plate (see figure below, number 2) shifts between the capacitors (1). The capacitors have a voltage of 5 volts. When the plate is in the middle (ie when the car drives straight ahead) the voltage on both capacitors is 2,5 volts. When the car makes a turn (in the case of the picture to the left) the plate shifts one way due to the centrifugal force and the centripetal force.
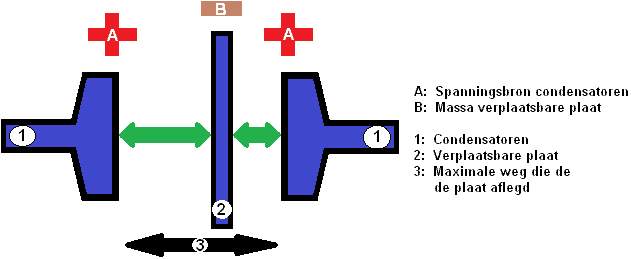
As the plate shifts, the capacitance of the right capacitor drops. This will now not amount to 2,5 Volts but, for example, 1,5V. The ESP control unit recognizes the difference between the two capacitors and can deduce from this how great the centrifugal force or the centripetal force is (ie how sharp the bend is made. In this way it can be determined whether the car has oversteer, for example). The values of this lateral acceleration sensor are used to compare the data from the wheel speed sensors and determine whether the ESP system should intervene.
Yaw moment sensor (Yaw sensor):
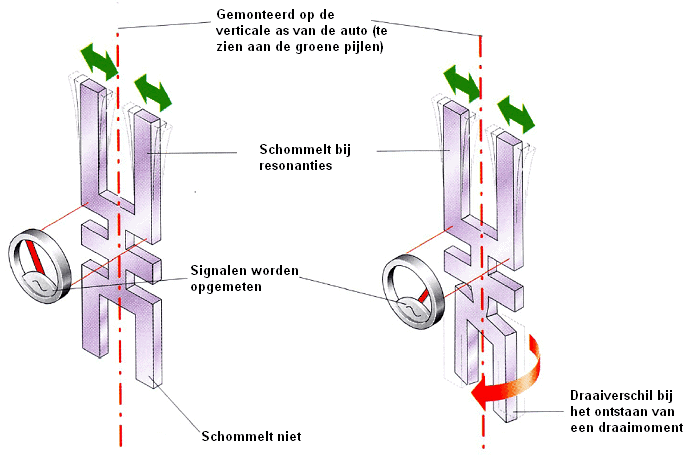
The yaw moment sensor, also called “Yaw sensor” in English, is placed together with the lateral acceleration sensor as much as possible in the middle of the car. The sensor provides data that the ESP system needs. The yaw moment sensor registers the tendency of the vehicle to rotate about the vertical axis. The value of this measurement is called the rotational speed and is displayed in degrees per second.
The sensor consists of two tuning forks. The upper tuning fork is made to vibrate (resonance) of 11000 Hz (11kHz) with an alternating voltage and rotates as the vehicle drives through a bend. The sharper the bend, the more the lower tuning fork is twisted relative to the upper fork. The principle is based on the gyroscopic forces (Coriolis force). When the rotating part is moved out of its position with torsion (twisting) gyroscopic forces are created. Hence the name yaw moment sensor.
Due to the torsion, a piezo element generates a voltage difference which is measured by the control unit. The voltage that is generated varies between 0 and 5 volts. In rest position (if no rotation is registered) the sensor delivers 2,5 volts.
Brake pressure sensor:
Separate hydraulic pressure sensors have also been added to the braking system (in both circuits), which can be seen in the images below. On older cars, these sensors are located in the brake lines. Nowadays the brake pressure sensors are usually built into the hydraulic unit of the ABS system itself. This unit is often visible under the hood. All hydraulic brake lines are connected to this.

