Subjects:
- Preface
- Operating principle electric motors
- DC electric motor with carbon brushes
- DC electric motor without carbon brushes
Preface:
Electric motors are found in more and more places in the car. In an electric motor, an electric current is converted into motion and heat. We find an electric motor in the mirror and seat adjustment, but also as a wiper motor on the wiper mechanism or as a starter motor. These electric motors operate on a voltage of 12 to 14 volts. On this page we limit ourselves to the electric motors in the interior and exterior.
Electric motors also provide the (partly) electric drive in hybrid and fully electric vehicles. This type of electric motor is covered on the page: HV electric motors.
The DC electric motors can be divided into:
- Electric motor with carbon brushes (electromagnetic field and armature)
- Series electric motors;
- Parallel electric motors;
- Brushless electric motors.
Working principle electric motors:
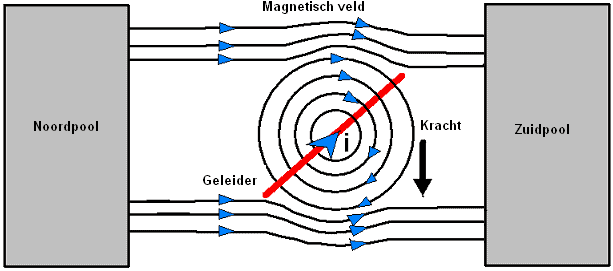
In an electric motor, an electric current is converted into a rotating movement. The movement arises because two magnetic poles attract or repel each other:
- A north pole and south pole attract each other;
- Two north poles repel each other;
- Two south poles repel each other.
A magnet has a north and south pole with opposite charges. When that magnet is broken in half, you don't suddenly have two loose poles, but two new magnets, each with a north and a south pole.
Several magnetic poles (north and south) are fixed to the housing. There is a magnetic field between the north and south poles. The output shaft (the armature) rotates due to change in the magnetic field.
In an electric motor, with the help of (usually) permanent magnets, or else electromagnets, two poles of the same name are constantly placed opposite each other. Because the poles of the same name repel each other, a movement is created.
DC electric motor with carbon brushes:
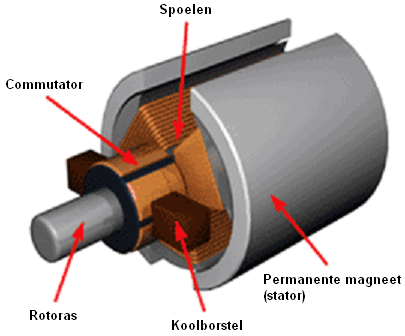
Almost all electric motors in automotive technology are designed as DC motors with permanent magnets and carbon brushes. In this type of electric motors we find the following magnets:
- Permanent magnets (one north pole and one south pole): there is a stationary magnetic field between them;
- Coils: an electromagnetic field is generated here. The rotating electromagnetic field is generated in the coils.
The permanent magnets are located to the left and right of the rotor and consist of one north pole and one south pole. A stationary magnetic field prevails between these north and south poles, which does not change when the electric motor is in operation or at a standstill.
A rotating electromagnetic field is generated in the coils as soon as current flows through them. The current is supplied and removed by the carbon brushes via the commutator.
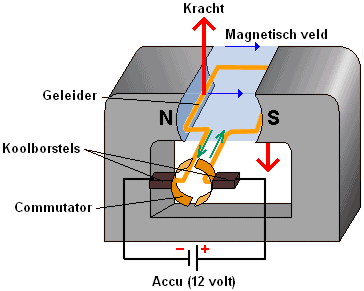
The current direction is reversed by means of commutation: two carbon brushes drag across the commutator, which consists of a plus and minus side. The carbon brush on the plus side carries the current to the conductor (green arrows in the picture). The current leaves the conductor via the carbon brush on the negative side. The current flowing through the conductor creates an electromagnetic field.
A force (red arrows in the image) develops between the magnetism generated in the armature (the conductor) and the field (the permanent magnets). This force causes the armature and commutator to rotate on their axis. The carbon brushes then hit the other part of the commutator, reversing the current direction in the armature. The magnetic field and the force build up in the same direction, so that the armature rotates on its axis again.
We can change the direction of rotation of the electric motor (read: the armature) by reversing the plus and minus of the carbon brushes.
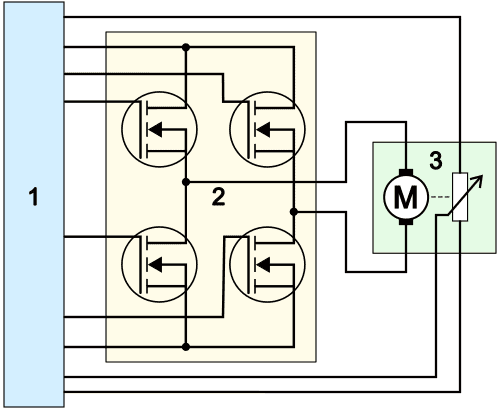
Exchanging the plus and minus can be achieved by means of an H-bridge.
- The ECU (1) simultaneously controls two of the four transistors or FETs (4);
- The FETs (2) give the electric motor (3) a plus and ground. Depending on which two FETs are turned on, the top carbon brush is positive and the bottom is ground, or vice versa;
- The potentiometer next to the electric motor registers the position and direction of rotation. Not all electric motors are equipped with a potentiometer.
See the page H-bridge for the possible designs and switching methods of the H-bridge.
DC electric motor without carbon brushes:
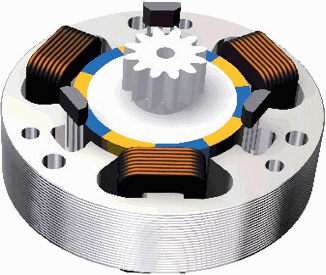
The brushless direct current (DC) motor is a synchronous motor. The electrical control has replaced the carbon brushes. This type of electric motor is very similar to the permanent magnet AC synchronous motor, as applied in the electric vehicle powertrain. The main difference between the two motors is the control: the AC motor is driven with a modulated sinusoidal AC voltage and the DC motor with a square-wave voltage.
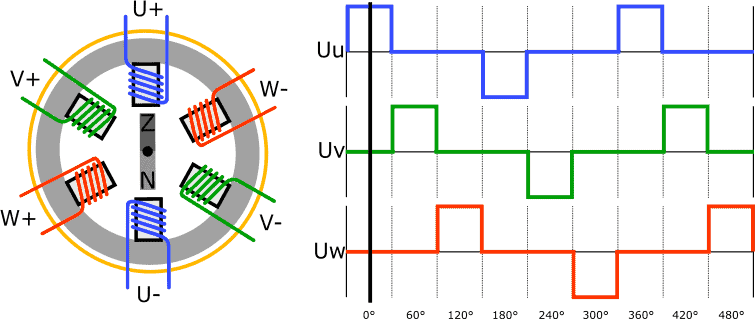
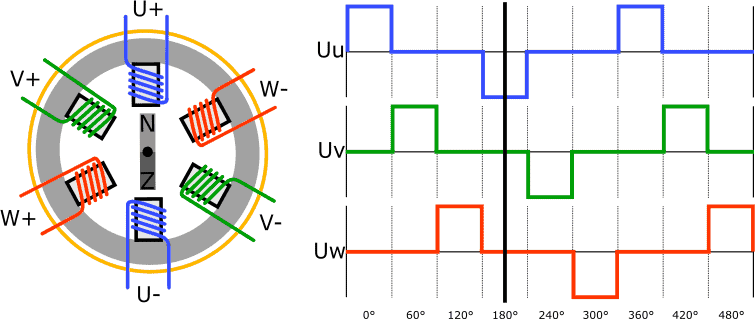
The stator often contains three or six coils (U, V and W) and the rotor is a permanent magnet. The figure below shows the schematic structure of the DC motor with next to it the voltage curve through the three coils. In fact, several Hall sensors are arranged between the poles to determine the rotor position.
The control unit determines which coils it should control on the basis of the rotor position.
In the following figure, the U+ coil is energized. The way the coil is wound around the pole determines whether it becomes a north or south pole. In this example, the U+ is the North Pole and the U- is the South Pole.
The rotor is designed as a permanent magnet. As already described in the preceding paragraphs, the rotor positions or rotates as a result of an alternating magnetic field through the coils.
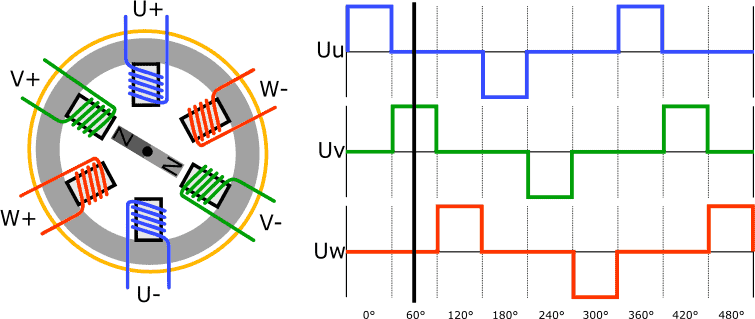
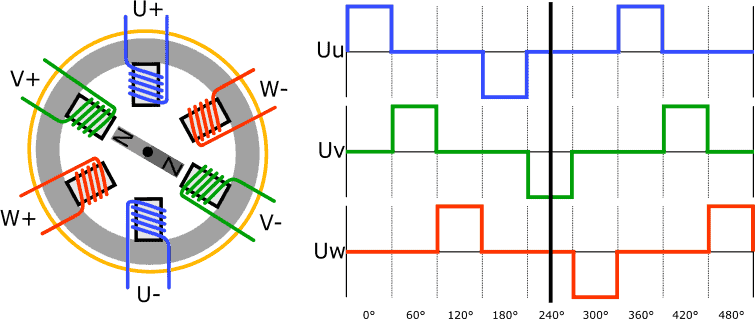
To rotate the rotor counterclockwise from the position shown in the previous figure, the V-coils are energized.
The V+ becomes the north pole, V- the south pole. The permanent magnet rotor twists;
the north and south poles attract each other, as do the south and north poles on the other side of the magnet.
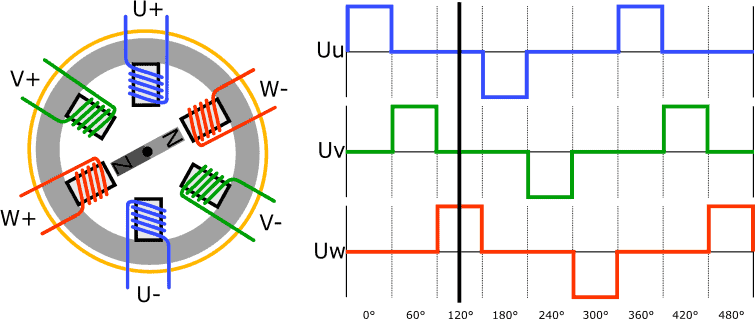
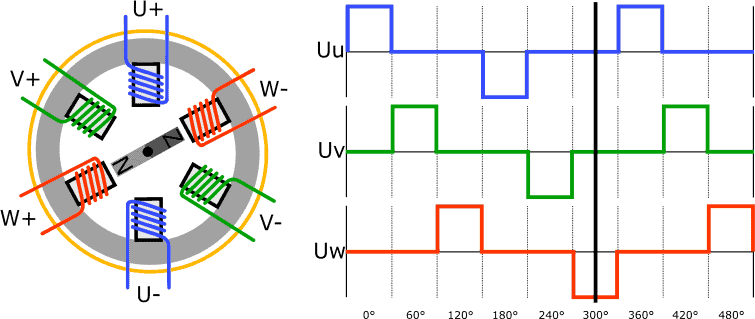
Now the W-coils are energized to allow the rotor to rotate 60 degrees further.
The W+ coil becomes a north pole and W- the south pole. The rotor turns and takes its new position.
The rotor in the following image has rotated 180 degrees since the first situation; in the first image, the south pole was facing up; now that's the north pole.
The polarity of the U+ coil and the U- coil is reversed, causing the current to flow in reverse through the coils. This makes the U+ a south pole, and the U- a north pole.
The permanent magnet rotor is further rotated by the change in the magnetic field.
To turn the rotor 60 degrees again, the V- is turned into a north pole and the V+ a south pole. The rotor takes the new position.
Again the rotor rotates 60 degrees as a result of changing the magnetic field in the coils:
The W- coil is the north pole and the W+ the south pole.
In the six situations described above, two coils are constantly energized simultaneously. We also often find brushless DC motors with three coils instead of six. With three coils, the U, V and W coils are also energized one after the other, but there is no change in polarity.
The brushless DC motor is a powerful motor suitable for applications where high torque is required for start-up, medium speed and high speed. The brushless DC motor and the stepper motor are often confused. This is not surprising, because the operation and control of the motors have many similarities: both motors are driven by creating a magnetic field between the coils and the rotor with permanent magnets. Nevertheless, in addition to the terminology, both engines have substantial differences, mainly in the application and therefore the choice of material.
The stepper motor is basically a brushless DC motor, but it is applied in a different field. While the DC motor is mainly used for prolonged running at high speeds, we see the stepper motor in applications where an adjustment in an exact position is most important.
The DC motor shown is controlled every 60° rotation of the rotor. This could possibly be lowered to 30° if we energize four coils simultaneously between each actuation, thus obtaining an intermediate position. However, a stepper motor is able to adjust steps from 1,8° to 0,9°. This further shows that the stepper motor is suitable for very accurate positions.
The different versions, the control methods by the ECU and the applications can be found on the page stepper motor.
